一种针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法与流程
本发明属于飞机蒙皮密封剂涂覆方法,尤其涉及一种针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法。
背景技术:
1、对蒙皮涂胶是飞机制造厂生产加工的重要环节,目前一般通过人工操作或机器人示教完成,人工操作存在涂胶精度低、表面质量较差、工作量大、危害施工者健康等问题;机器人搭配人工示教存在工作量大、无法适应频繁新增的产品规格等问题,会导致生产成本过高、工作效率低下,无法很好地满足用户需求。
2、另外,现有的离线编程软件通常不支持涂胶轨迹的自动生成,只能手动提取数模的特征,然后手动生成机器人程序,从而耗费了大量的时间和人工成本。
技术实现思路
1、为了克服现有蒙皮涂胶轨迹生成方法存在的上述缺陷,本发明提出了一种新的针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法。
2、术语解释
3、缝内涂胶:在两张蒙皮中的下层蒙皮的搭接面上涂胶;或在长珩上和蒙皮的接触面上涂胶。
4、缝外涂胶:在两张粘在一起的蒙皮的外接缝上涂胶。
5、轨迹点数据:轨迹点数据除了位置信息(x,y,z),还有方向信息,可以用四元数表示,或者用欧拉角(分别绕z轴、y轴和x轴的旋转角度)表示。
6、本方法可以在蒙皮的数模上实现涂胶轨迹的自动生成,由于蒙皮数模和实际蒙皮会存在偏差,在数模基础上生成的涂胶轨迹并不能直接用于生产,因此,本方法中根据数模基础上生成的涂胶轨迹,通过视觉相机识别蒙皮上对应的边和面等特征,进行误差补偿,并生成最终的离线涂胶轨迹。本方法的总体流程包括:
7、(1)把蒙皮+工装数模导入到离线编程软件中。
8、(2)选择蒙皮上对应的边、面等特征,设置相关参数,生成初步的涂胶轨迹。
9、(3)导出涂胶轨迹,用机器人携带视觉相机沿涂胶轨迹运行一遍,进行误差补偿,并生成最终的离线涂胶程序。
10、本方法的核心在于其中间步骤,即选择蒙皮上对应的边、面等特征,设置相关参数,生成初步的涂胶轨迹。
11、具体地,本发明提供了一种针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法,本方法包括:缝内涂胶轨迹生成方法和缝外涂胶轨迹生成方法;其中:
12、所述缝内涂胶轨迹生成方法通过确定边缘点平移的方向向量,把边缘上的点平移到面内,平移距离是涂胶宽度的一半;
13、所述缝外涂胶轨迹生成方法通过外缝上的点做出两个垂直面的法线,然后得到两条法线的夹角和轴线,最后把其中一条法线绕着轴线旋转二分之一夹角。
14、进一步地,本发明针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法中所述缝内涂胶包括长珩与蒙皮接触面涂胶、以及两张蒙皮的搭接处涂胶。
15、进一步地,本发明针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法中所述缝内涂胶使用刀型涂胶嘴,刀型涂胶嘴的轴线垂直于长珩平面,刀型涂胶嘴的刀刃方向垂直于长珩的上沿。
16、进一步地,本发明针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法中所述缝内涂胶轨迹生成方法包括:
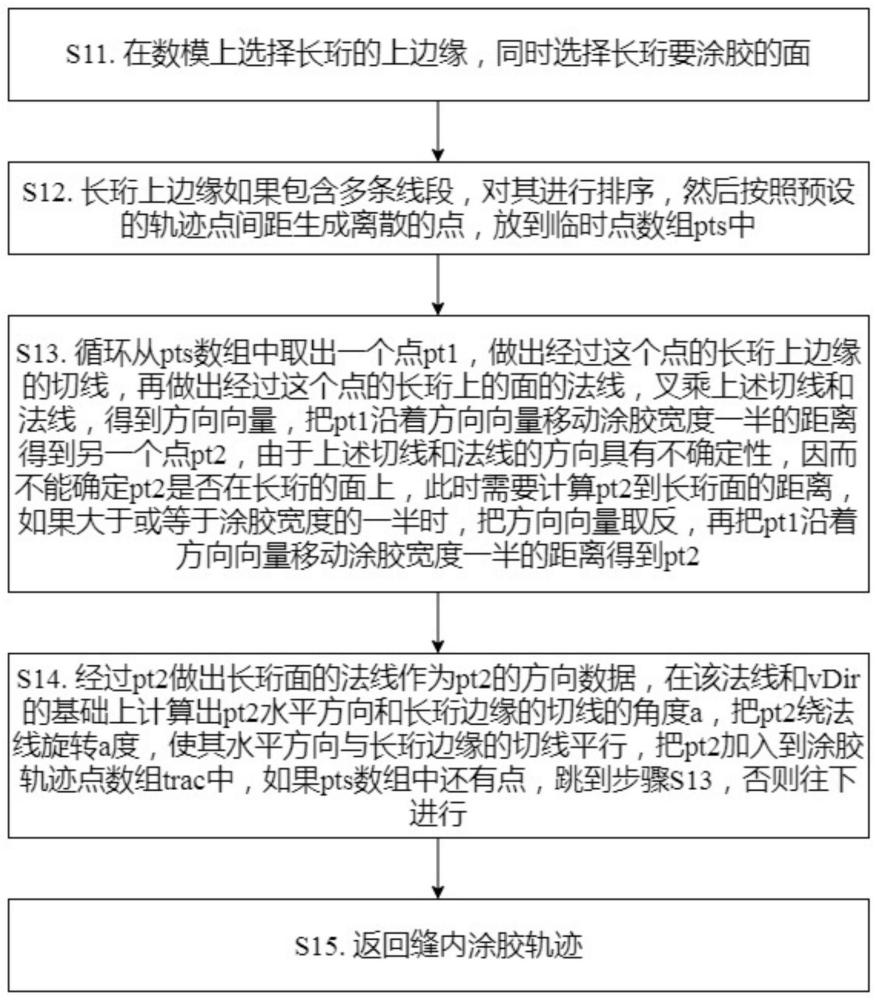
17、s11.在数模上选择长珩的上边缘,同时选择长珩要涂胶的面;
18、s12.长珩上边缘如果包含多条线段,对其进行排序,然后按照预设的轨迹点间距生成离散的点,放到临时点数组pts中;
19、s13.循环从pts数组中取出一个点pt1,做出经过这个点的长珩上边缘的切线,再做出经过这个点的长珩上的面的法线,叉乘上述切线和法线,得到方向向量,把pt1沿着方向向量移动涂胶宽度一半的距离得到另一个点pt2,由于上述切线和法线的方向具有不确定性,因而不能确定pt2是否在长珩的面上,此时需要计算pt2到长珩面的距离,如果大于或等于涂胶宽度的一半时,把方向向量取反,再把pt1沿着方向向量移动涂胶宽度一半的距离得到pt2;
20、s14.经过pt2做出长珩面的法线作为pt2的方向数据,在该法线和vdir的基础上计算出pt2水平方向和长珩边缘的切线的角度a,把pt2绕法线旋转a度,使其水平方向与长珩边缘的切线平行,把pt2加入到涂胶轨迹点数组trac中,如果pts数组中还有点,跳到步骤s13,否则往下进行;
21、s15.返回缝内涂胶轨迹;
22、其中:vdir为机器人末端初始状态的水平方向向量;pts为临时点数组;trac为涂胶轨迹点数组。
23、进一步地,本发明针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法步骤s12中所述的预设的轨迹点间距为20mm;涂胶宽度为16mm。
24、进一步地,本发明针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法中所述缝外涂胶是指两张蒙皮搭接后,在上方蒙皮与下方蒙皮的接触缝上进行涂胶。
25、进一步地,本发明针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法中所述缝外涂胶使用针型涂胶嘴,针型涂胶嘴与两个互相垂直的面的夹角都是45度。
26、进一步地,本发明针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法中所述缝外涂胶轨迹生成方法包括:
27、s21.在数模上选择两张蒙皮的外缝线段,同时选择该线段相邻的两个互相垂直的面;
28、s22.如果两张蒙皮包含多条外缝线段,对其进行排序,然后按照预设的轨迹点间距生成离散的点,放到临时点数组pts中;
29、s23.确定两个面的法线方向,从pts数组中取出第二个点pt2,做出经过这个点的两个面的法线,确定是否需要把法线方向取反,保存两条法线到normal1和normal2中;
30、s24.循环从pts数组中取出一个点pt1,分别做出两个面的法线n1和n2,通过和前述的normal1和normal2比较它们的夹角,先计算n1和normal1的夹角,如果夹角接近90度,则说明n1和normal1不是同一个面的法线,再计算n1和normal2的夹角,如果夹角接近180度,则需要把n1反转;同样的过程处理法线n2;用n1和n2更新normal1和normal2;
31、s25.计算n1和n2的夹角angle,叉乘n1和n2得到轴线向量,把n1绕轴线向量旋转angle/2度,作为pt1的方向数据,把pt1加入到涂胶轨迹点数组trac中;如果pts数组中还有点,跳到步骤s24,否则往下进行;
32、s26.返回缝外涂胶轨迹;
33、其中:pts为临时点数组;trac为涂胶轨迹点数组;normal1和normal2分别为两个垂直面的法线向量。
34、进一步地,本发明针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法步骤s22中所述的预设的轨迹点间距为20mm。
35、另外,本发明还提供了一种计算机可读存储介质,所述存储介质上存储有计算机程序,所述程序被处理器执行时实现上述的针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法的步骤。
36、综上,与现有飞机蒙皮涂胶轨迹生成方法相比,本发明针对飞机缝内、缝外密封剂涂覆的机器人轨迹离线生成方法可以在数模上自动生成涂胶轨迹,效率更高,适用性更广,并大大降低了作业的时间和人工成本。
- 还没有人留言评论。精彩留言会获得点赞!