一种基于机器人实时坐标的过门方法与流程
本发明涉及机器人导航,具体为一种基于机器人实时坐标的过门方法。
背景技术:
1、目前,机器人越来越广泛地被应用到制造业、物流和仓储、医疗、农业、教育、服务业等领域,在提高产业效率方面发挥着重要作用。随着技术的完善,机器人上越来越多的功能被开发出来并应用到更多的场景下,尤其是商场、办公室、住宅等室内场景。
2、室内场景下的机器人具备可移动的底盘、雷达、摄像头以及各类传感器,可以扫描室内环境建立地图、设立禁行线、自主导航移动到地图上的任意地点。室内各个区域之间会存在着关闭的门,在机器人自主导航工作时,一个重要的问题便是使机器人可以穿过门。因此,需要机器人能够检测到门并控制开、关从而自主穿梭于各个区域之间。
3、根据中国专利号为cn 217001408 u的一种机器人过门系统,包括第一信号接收模块和第二信号接收模块;第一信号接收模块和第二信号接收模块分别设置在门两侧的墙体上,机器人上设置有信号发送模块,门上设置有自动开门机,自动开门机与第一信号接收模块和第二信号接收模块之间设置有处理器。能够实现机器人在各个区域之间自动过门,保证机器人对各区域进行自动巡检。
4、目前,针对机器人如何过门已提出了多种方法,但是都有其局限性和缺点。例如通过rfid标签或者红外传感器在门附近检测机器人和门之间的距离,从而判断是否需要触发开门,这种方式需要增加额外的硬件设备并且无法避免机器人路过门的情况。还有通过摄像头和识别算法去识别机器人和门的距离和姿态来作为开门依据,这类方案前期算法的实现、训练需要准备大量的时间和样本,成本较高,所以需要一种基于机器人实时坐标的过门方法来解决上述问题。
技术实现思路
1、解决的技术问题
2、针对现有技术的不足,本发明提供一种机器人过门的方法,不需要额外的传感器和图像识别算法、样本,以较低的成本实现机器人在自主导航的过程中穿过一扇或者多扇门,解决了现有方案前期算法的实现、训练需要准备大量的时间和样本,成本较高的问题。
3、技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:一种基于机器人实时坐标的过门方法,包括机器人过门程序、开、关门控制过程,其特征在于:所述机器人计算机程序的具体工作步骤如下:
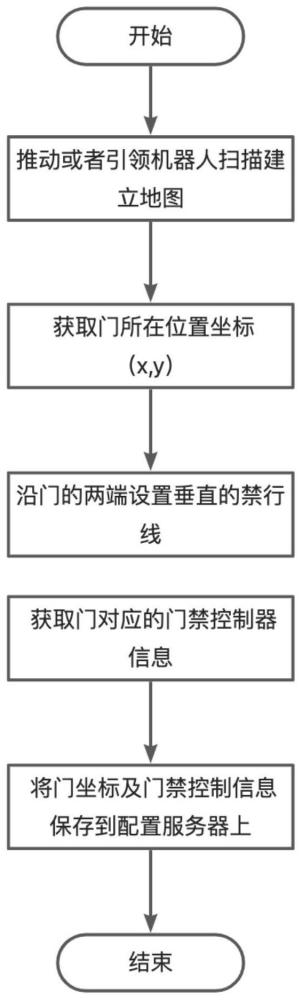
5、sp1、通过推动或者引领的方式,让机器人扫描工作空间完成空间地图的建立。
6、sp2、将机器人移动到门所在的位置,读取机器人此时的实时坐标,作为门所在的坐标,也可以通过建立好的地图在上面直接选取坐标。
7、sp3、在机器人地图工具上沿门的两端设置垂直的禁行线。
8、sp4、获取门所对应的wi-fi门禁控制器信息。
9、sp5、将门的坐标和对应的门禁控制器配置信息、开门阈值保存在配置服务器上。
10、优选的,所述wi-fi门禁控制器信息主要包含有门禁控制器ip、端口、开门控制码和关门控制码。
11、优选的,所述机器人具体的开、关门控制过程详细说明如下:
12、sp1、逻辑控制器从配置服务器获取所有门的坐标和门禁控制器信息以及阈值并保存在内存中。
13、sp2、逻辑控制器从机器人下位机实时获取当前的坐标(x1,y1)。
14、sp3、从内存中读取当前机器人的工作状态,判断是否处于工作状态。
15、sp4、当机器人处于工作状态时,遍历每一扇门的配置信息,从配置信息获取门所在的坐标(x2,y2)。
16、sp5、通过两点间的距离公式:获取机器人到门之间的距离。
17、sp6、判断机器人和门的距离是否小于阈值,是的话再判断是否需要开门,如果是则发送开门命令。针对单开门和对开门的情况,为了防止在开门的过程中机器人前进与门发生碰撞,阈值设置应大于开门半径,确保门提前打开完毕后机器人再继续前进;针对自动关门的情况,为了防止机器人在尚未完全通过时门自动关闭导致机器人被夹,机器人在此过程中会持续的发送开门命令
18、sp7、判断机器人和门的距离是否大于阈值,是的话再判断是否需要关门,如果是则执行关门。需要关门的条件是机器人执行了开门的操作。
19、有益效果
20、本发明提供了一种基于机器人实时坐标的过门方法。具备以下有益效果:
21、1、本发明仅使用机器人实时坐标数据完成开门、关门时机的判断,不需要额外安装其他的辅助硬件设备。在实施时,利用机器人下位机自带的地图模块完成地图创建并提取门的坐标,不需要其他的安装、施工操作。在具体开关门时机的计算上,直接通过两点间的距离公式配合阈值,在毫秒内即可完成。相比于图像、物体识别方案,计算逻辑简单、算力消耗小、响应速度快,并且不需要涉及到模型训练和算法参数调教。针对机器人路过而无需开门的情况,通过下位机程序自带的禁行线功能,使得机器人导航的过程中绕过开门阈值范围,可以有效地防止误开门。本发明适应不同的门类型和开门方式,通过阈值大小和开门后延时前进的设置可以有效地避免过门的过程中与门发生碰撞,并且对于空间内门的数量没有限制,可以保证安全的通过工作空间下的全部门禁,解决了现有方案前期算法的实现、训练需要准备大量的时间和样本,成本较高的问题。
技术特征:
1.一种基于机器人实时坐标的过门方法,包括机器人过门程序、开、关门控制过程,其特征在于:所述机器人计算机程序的具体工作步骤如下:
2.根据权利要求1所述的一种基于机器人实时坐标的过门方法,其特征在于:所述wi-fi门禁控制器信息主要包含有门禁控制器ip、端口、开门控制码和关门控制码。
3.根据权利要求1所述的一种基于机器人实时坐标的过门方法,其特征在于:所述机器人具体的开、关门控制过程详细说明如下:
技术总结
本发明提供一种基于机器人实时坐标的过门方法,涉及机器人导航技术领域,包括机器人过门程序、开、关门控制过程,机器人计算机程序的具体工作步骤如下:Sp1、通过推动或者引领的方式,让机器人扫描工作空间完成空间地图的建立,Sp2、将机器人移动到门所在的位置,读取机器人此时的实时坐标,作为门所在的坐标,也可以通过建立好的地图在上面直接选取坐标,Sp3、在机器人地图工具上沿门的两端设置垂直的禁行线,Sp4、获取门所对应的Wi‑F i门禁控制器信息,Sp5、将门的坐标和对应的门禁控制器配置信息、开门阈值保存在配置服务器上,本发明解决了现有方案前期算法的实现、训练需要准备大量的时间和样本,成本较高的问题。
技术研发人员:姚磊,何洲
受保护的技术使用者:上海新柏石智能科技股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!