工业机器人运动轨迹规划方法及设备与流程
本发明涉及一种工业机器人运动轨迹规划方法及设备。
背景技术:
1、工业领域一直是国家大力发展的重点,通过深度学习ai技术为工业生产赋智赋能已经成为了现代工业发展的新趋势。
2、目前工业机器人已经在工业生产中得到了一定的应用,但工业机器人在使用过程中仍然存在比较“原始”的实践方式。例如,在工业质检任务中,需要专业的光学工程师对所检测的工件进行检测拍照点设置以及运动点位排序,这种人工的方式无疑影响了整体质检工作的效率。此外,利用可视图、dijkstra、遗传算法、rrt等纯算法生成的工业运动轨迹往往忽略一些外部环境约束,导致规划的路径不够理想,后续需要专业的工程师人员进行远程调试或现场调机,并可能导致生产延误等一系列问题。
技术实现思路
1、本发明的目的在于提供一种工业机器人运动轨迹规划方法及设备。
2、为解决上述问题,本发明提供一种工业机器人运动轨迹规划方法,包括:
3、基于真实的生产环境信息, 构建供机器人运动的虚拟环境;
4、基于工业机器人的各种移动任务和所述虚拟环境,训练轨迹规划模型;
5、获取待生成轨迹的工业机器人的移动任务,基于待生成轨迹的工业机器人的移动任务、所述虚拟环境和轨迹规划模型,得到待生成轨迹的工业机器人的移动任务的最终的运动轨迹。
6、进一步的,上述工业机器人运动轨迹规划方法中,所述生产环境信息,包括:工业机器人自身、控制机器人的设备、工厂设备、工业机器人的机台、载物台、检测工件和环境障碍物。
7、进一步的,上述工业机器人运动轨迹规划方法中,基于真实的生产环境信息, 构建供机器人运动的虚拟环境,包括:
8、基于现实生产环境,获取真实的生产环境信息;
9、基于真实的生产环境信息,通过虚拟计算机程序模拟现实生产环境,构建供所述工业机器人运动的虚拟环境;
10、基于现实生产环境对虚拟环境进行验收,若验收通过,则得到验收通过的虚拟环境;若验收不通过,基于验收结果,对工业机器人运动的虚拟环境进行修正后重新执行本步骤,直至得到验收通过的虚拟环境。
11、进一步的,上述工业机器人运动轨迹规划方法中,基于工业机器人的各种移动任务和所述虚拟环境,训练轨迹规划模型,包括:
12、根据工业机器人的各种移动任务选择训练轨迹规划模型的轨迹规划算法;根据工业机器人的各种移动任务和训练轨迹规划模型的需求,对轨迹规划模型的超参数进行设置;
13、基于选择的轨迹规划算法和设置的轨迹规划模型的超参数,构建并初始化轨迹规划模型;
14、基于所述虚拟环境,对所述轨迹规划模型进行训练。
15、进一步的,上述工业机器人运动轨迹规划方法中,在虚拟环境中的工业机器人的运动空间内随机生成若干路径测试点,基于若干路径测试点进行轨迹规划,将轨迹规划结果存入经验采样池,基于经验采样池中的轨迹规划结果,迭代更新所述轨迹规划模型的参数;
16、观察训练中轨迹规划模型的输出结果,当观察到轨迹规划模型的输出有能力规避环境障碍物并到达目标点位、同时轨迹规划模型训练的迭代更新次数到达预设上限阈值时,或当观察到轨迹规划模型的输出有能力规避环境障碍物并到达目标点位、同时轨迹规划模型收敛时,停止训练,保存当前的轨迹规划模型,作为训练完成的轨迹规划模型。
17、进一步的,上述工业机器人运动轨迹规划方法中,得到待生成轨迹的工业机器人的移动任务的最终的运动轨迹中,
18、所述最终的运动轨迹筛选标准同时满足如下三个条件:
19、(1)工业机器人依照最终的运动轨迹运动时有避障和成功到达路径测试点的能力;
20、(2)工业机器人运动遍历最终的运动轨迹中的所有路径测试点的时间在所有可选的运动轨迹中最短;
21、(3)最终的运动轨迹中的辅助插入点在所有可选的运动轨迹中最少。
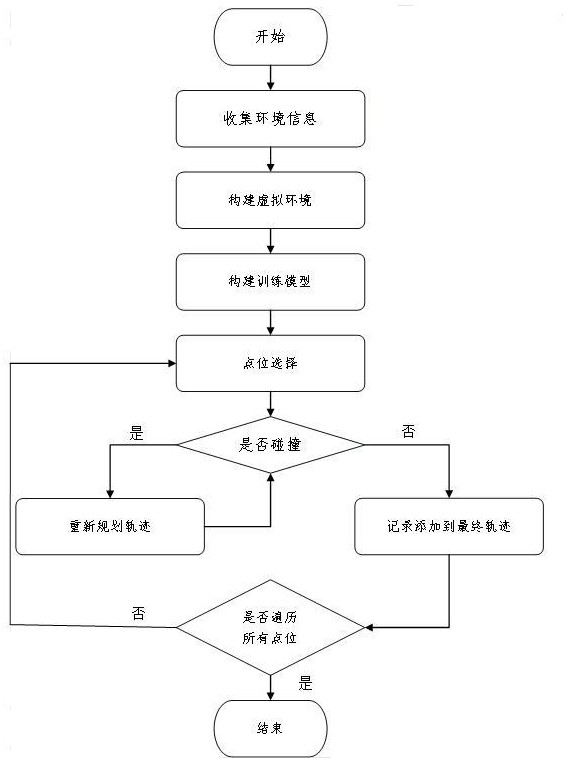
22、进一步的,上述工业机器人运动轨迹规划方法中,获取待生成轨迹的工业机器人的移动任务,基于待生成轨迹的工业机器人的移动任务、所述虚拟环境和轨迹规划模型,得到待生成轨迹的工业机器人的移动任务的最终的运动轨迹,包括:
23、步骤s31,基于待生成轨迹的工业机器人的移动任务,得到排序好的路径测试点后,转到步骤步骤s32;
24、步骤s32,按顺序每次遍历顺序上相邻的两个路径测试点作为轨迹规划的当前起点与当前终点后,转到步骤步骤s33;
25、步骤s33,将当前起点与当前终点传入虚拟环境,在虚拟环境中模拟从当前起点到当前终点的直线运动轨迹,若当前起点到当前终点的直线运动轨迹在虚拟环境中不发生碰撞,则传递“路径通过”的信号,将当前的直线运动轨迹依序保存到最终的运动轨迹中后,转到步骤s32,直至遍历完所有排序好的路径测试点;若当前起点到当前终点的直线运动轨迹在虚拟环境中发生碰撞,则传递“路径碰撞”的信号,将当前起点与当前终点传入所述轨迹规划模型,以得到轨迹规划模型输出的当前起点与当前终点之间的新路径,取当前的新路径的中点作为当前起点与当前终点之间的轨迹辅助插入点;将当前起点与当前轨迹辅助插入点之间的直线运动轨迹依序保存到最终的运动轨迹中,并将当前辅助插入点与当前终点之间的直线运动轨迹依序保存到最终的运动轨迹中,后转到步骤s32,直至遍历完所有排序好的路径测试点。
26、根据本发明的另一方面,还提供一种计算机可读存储介质,其上存储有计算机可执行指令,其中,该计算机可执行指令被处理器执行时使得该处理器:
27、基于真实的生产环境信息, 构建供机器人运动的虚拟环境;
28、基于工业机器人的各种移动任务和所述虚拟环境,训练轨迹规划模型;
29、获取待生成轨迹的工业机器人的移动任务,基于待生成轨迹的工业机器人的移动任务、所述虚拟环境和轨迹规划模型,得到待生成轨迹的工业机器人的移动任务的最终的运动轨迹。
30、根据本发明的另一方面,还提供一种计算器设备,其中,包括:
31、处理器;以及
32、被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器:
33、基于真实的生产环境信息, 构建供机器人运动的虚拟环境;
34、基于工业机器人的各种移动任务和所述虚拟环境,训练轨迹规划模型;
35、获取待生成轨迹的工业机器人的移动任务,基于待生成轨迹的工业机器人的移动任务、所述虚拟环境和轨迹规划模型,得到待生成轨迹的工业机器人的移动任务的最终的运动轨迹。
36、与现有技术相比,本发明包括生产环境构建、算法模型构建、轨迹规划和轨迹输出本发明通过在虚拟环境中模拟工业生产环境,通过ai算法生成机器人移动轨迹,并实时提供轨迹质量信息实现输出结果的动态调整,优化了轨迹生成和运动所需要的时间,提升了轨迹质量,减少了人工现场调机需求,极大的提升了工业生产效率。本发明通过虚拟环境模拟运动过程,一方面可以使一部分点位(路径测试点)不在需要轨迹规划,减少了轨迹规划所需时间;另一方面,提前进行了运动验证,避免了机器人无法执行某些运动轨迹的问题。
37、另外,利用深度学习ai技术在进行轨迹规划:提升了机器人部署效率,只需要规划一次,即可应用于所有相同任务的机器人中;增加了服务泛用性,当环境发生变化时,可以通过轨迹规划模型再次规划路径;减少了工程师的调机工作量,提升了工作效率。
38、此外,本发明对于直线轨迹被阻挡,通过轨迹规划模型生成了新的不碰撞曲线轨迹,但不直接使用轨迹规划模型得到的弧线虚线轨迹,而是取弧线虚线轨迹中点作为轨迹辅助点,得到新的折线轨迹,可以减少轨迹规划中无意义的插入点,提升了轨迹规划和轨迹运动的效率。
- 还没有人留言评论。精彩留言会获得点赞!