一种基于折纸结构的可调限制层软体机器抓手
本发明涉及软体机器人,尤其涉及一种基于折纸结构的可调限制层软体机器抓手。
背景技术:
1、从传统折纸艺术中获得灵感的折纸技术运用于航天工程领域,其便携性,可展开性,小型化和轻量化等优点奠定了应用于空间结构领域的基础。近年来,由于材料科学、仿生学、智能制造等技术的蓬勃发展,较传统刚性机器人而言,软体机器人表现出其优异的柔顺性和环境自适应性,成为在机器人领域一个兴起的发展分支。研究人员运用气动的驱动方法将折纸技术与软体机器人技术结合在一起,给予了两种领域的跨学科交织。折纸设计还具有其他优点,如所需的形状或运动可以由运动学强有力地引导,以及多种构成材料(从柔顺的纸到钢板),折纸设计已被认为是一种有前途的可展开机器的方法。目前已有相关研究可被探究。
2、现有的技术的基于双折纸设计的软体抓手,在流体输入的驱动下,双折纸软执行器产生准顺序部署和弯曲运动,由低拉伸折纸组件的非对称展开指导。部署和弯曲之间的优势可以通过改变展开行为来改变,从而实现运动的预编程。但是,采用的抓手的限制层是通过预先打印的,抓手的运动轨迹受到了限制,导致其抓取物体的适应性能力较差,抓手抓取范围有限。
3、因此,为了解决此类问题,我们提出了一种基于折纸结构的可调限制层软体机器抓手。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于折纸结构的可调限制层软体机器抓手。
2、为了实现上述目的,本发明采用了如下技术方案:
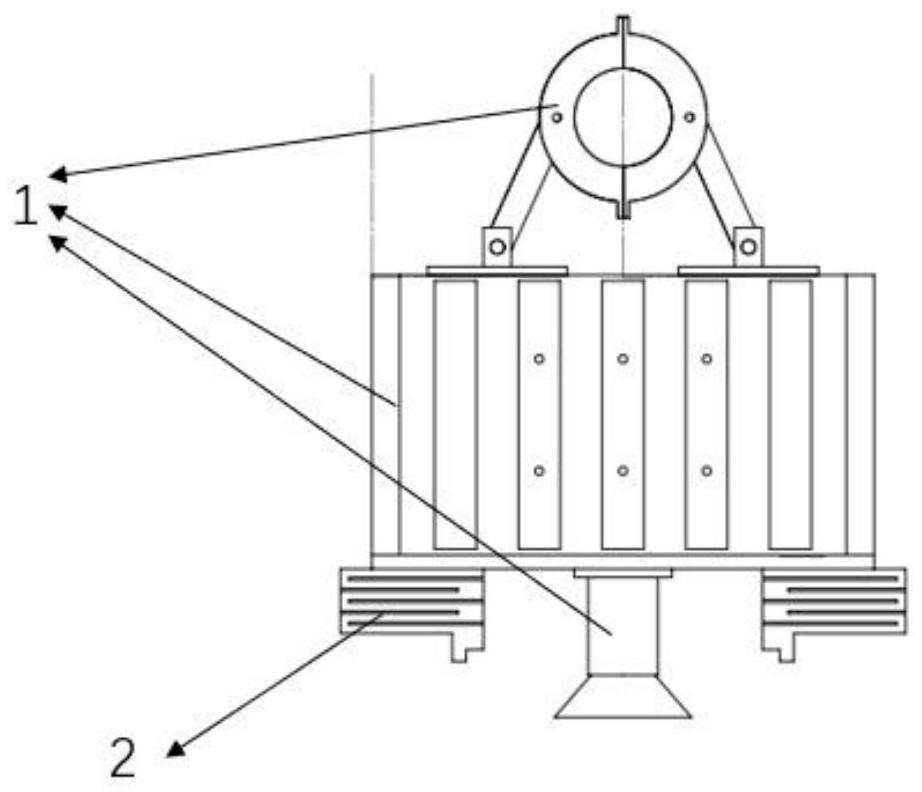
3、一种基于折纸结构的可调限制层软体机器抓手,包括主体结构单元,所述主体结构单元底部对称设有两个折纸结构单元,主体结构单元底部中间设有吸盘机构,折纸结构单元包括折纸执行器,折纸执行器为多段折弯软体材质,折纸执行器上设有限制层,折纸执行器设有能够充气的腔体,折纸执行器能够弯折,主体结构单元内设有用于收卷控制限制层的舵机装置,主体结构单元上设有与吸盘机构和舵机装置以及折纸执行器匹配的驱动控制系统单元。
4、优选的,所述主体结构单元包括外壳支撑件,外壳支撑件底部固定有底座,底座底部设有用于固定折纸执行器的长方形凹槽。
5、优选的,所述限制层底端与折纸执行器底端固定,折纸执行器由上到下依次安装有连接块一、连接块二、连接块三、连接块四,限制层的上端依次穿过连接块四、连接块三、连接块二以及连接块一。
6、优选的,所述舵机装置包括通过舵机支架与底座上侧固定的两个舵机,舵机匹配安装有旋转轴,两个舵机的旋转轴分别与两个限制层的顶端固定连接并收卷匹配。
7、优选的,所述吸盘机构包括与底座底部固定的吸盘支架,吸盘支架底部安装固定有吸盘。
8、优选的,所述驱动控制系统单元包括正压气路控制模块,负压气路控制模块以及电路控制模块。
9、优选的,所述正压气路控制模块包括安装设置在主体结构单元内的正压气泵,正压气泵通过三通接头对接有两个调压阀,两个调压阀分别通过两个橡胶软管与折纸执行器的腔体对接连通。
10、优选的,所述负压气路控制模块包括安装设置在主体结构单元内的负压气泵,负压气泵通过塑料管与吸盘连接。
11、优选的,所述电路驱动模块包括控制器和蓝牙模块,外壳支撑件上固定有控制器支架,控制器与蓝牙模块均安装在控制器支架上,控制器通过杜邦线与蓝牙模块,控制器能够控制两个舵机以及正压气泵和负压气泵。
12、优选的,所述外壳支撑件顶端固定有上层底板,上层底板固定安装有若干连接杆,连接杆另一端安装固定有半圆形挂件。
13、与现有技术相比,本发明的有益效果是:
14、1:本发明设置的折纸执行器以及限制层,限制层通过连接块设置在折纸执行器上,限制层能够通过舵机收卷控制长度,抓取物体时,通过观察物体大小调整限制层的长度,从而实现通过拉动和释放限制层的长度来达到预期目标,折纸执行器再注入气压,不同的气压对折纸执行器运动轨迹与范围产生影响,能够实现有效抓取目标物体的效果。
15、2:本发明设置的正压气体输入驱动的准顺序展开和弯曲运动,实现了双层折纸设,利用软材料的灵活性与限制层的长度可调,实现了较大的弯曲范围,具备良好的自适应抓取能力。
技术特征:
1.一种基于折纸结构的可调限制层软体机器抓手,包括主体结构单元(1),其特征在于,所述主体结构单元(1)底部对称设有两个折纸结构单元(2),主体结构单元(1)底部中间设有吸盘机构,折纸结构单元(2)包括折纸执行器(13),折纸执行器(13)为多段折弯软体材质,折纸执行器(13)上设有限制层(11),折纸执行器(13)设有能够充气的腔体,折纸执行器(13)能够弯折,主体结构单元(1)内设有用于收卷控制限制层(11)的舵机装置,主体结构单元(1)上设有与吸盘机构和舵机装置以及折纸执行器(13)匹配的驱动控制系统单元。
2.根据权利要求1所述的一种基于折纸结构的可调限制层软体机器抓手,其特征在于,所述主体结构单元(1)包括外壳支撑件(6),外壳支撑件(6)底部固定有底座(12),底座(12)底部设有用于固定折纸执行器(13)的长方形凹槽。
3.根据权利要求2所述的一种基于折纸结构的可调限制层软体机器抓手,其特征在于,所述限制层(11)底端与折纸执行器(13)底端固定,折纸执行器(13)由上到下依次安装有连接块一(16)、连接块二(17)、连接块三(18)、连接块四(19),限制层(11)的上端依次穿过连接块四(19)、连接块三(18)、连接块二(17)以及连接块一(16)。
4.根据权利要求3所述的一种基于折纸结构的可调限制层软体机器抓手,其特征在于,所述舵机装置包括通过舵机支架(8)与底座(12)上侧固定的两个舵机(9),舵机(9)匹配安装有旋转轴(10),两个舵机(9)的旋转轴(10)分别与两个限制层(11)的顶端固定连接并收卷匹配。
5.根据权利要求4所述的一种基于折纸结构的可调限制层软体机器抓手,其特征在于,所述吸盘机构包括与底座(12)底部固定的吸盘支架(14),吸盘支架(14)底部安装固定有吸盘(15)。
6.根据权利要求5所述的一种基于折纸结构的可调限制层软体机器抓手,其特征在于,所述驱动控制系统单元包括正压气路控制模块,负压气路控制模块以及电路控制模块。
7.根据权利要求6所述的一种基于折纸结构的可调限制层软体机器抓手,其特征在于,所述正压气路控制模块包括安装设置在主体结构单元(1)内的正压气泵(21),正压气泵(21)通过三通接头对接有两个调压阀(22),两个调压阀(22)分别通过两个橡胶软管(20)与折纸执行器(13)的腔体对接连通。
8.根据权利要求7所述的一种基于折纸结构的可调限制层软体机器抓手,其特征在于,所述负压气路控制模块包括安装设置在主体结构单元(1)内的负压气泵,负压气泵通过塑料管与吸盘(15)连接。
9.根据权利要求8所述的一种基于折纸结构的可调限制层软体机器抓手,其特征在于,所述电路驱动模块包括控制器(23)和蓝牙模块(24),外壳支撑件(6)上固定有控制器支架(7),控制器(23)与蓝牙模块(24)均安装在控制器支架(7)上,控制器(23)通过杜邦线与蓝牙模块(24),控制器(23)能够控制两个舵机(9)以及正压气泵(21)和负压气泵。
10.根据权利要求1所述的一种基于折纸结构的可调限制层软体机器抓手,其特征在于,所述外壳支撑件(6)顶端固定有上层底板(5),上层底板(5)固定安装有若干连接杆(4),连接杆(4)另一端安装固定有半圆形挂件(3)。
技术总结
本发明涉及软体机器人技术领域,具体的公开了一种基于折纸结构的可调限制层软体机器抓手,包括主体结构单元,主体结构单元底部对称设有两个折纸结构单元,主体结构单元底部中间设有吸盘机构,折纸结构单元包括折纸执行器,折纸执行器为多段折弯软体材质,折纸执行器上设有限制层,折纸执行器设有能够充气的腔体,折纸执行器能够弯折,主体结构单元内设有用于收卷控制限制层的舵机装置,主体结构单元上设有与吸盘机构和舵机装置以及折纸执行器匹配的驱动控制系统单元。本发明中的限制层能够调整长度,使得折纸执行器的运动轨迹与范围多样,达到有效抓取目标物体的同时,还具有抓取适应性较好,抓取范围较大的效果。
技术研发人员:杨扬,朱科锦,谢园,闫少阳
受保护的技术使用者:南京信息工程大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!