一种基于开源机械臂与机器视觉的菠萝去眼装置
本发明涉及果蔬加工设备,具体为一种基于开源机械臂与机器视觉的菠萝去眼装置。
背景技术:
1、菠萝去眼是菠萝食用或加工前的一道重要的工序,目前菠萝主要有两种去眼方式:一种是人工去眼,有人使用刀具一个个去除,这种方式效率很低且劳动强度大;另一种是通过机器来去眼,其中既有用机器把菠萝眼厚度以内的果肉连同菠萝眼、菠萝皮直接割掉,这样虽然节省了人力,提高了生产效率,但是接近1/6的果肉被割掉,造成很大的浪费;
2、如申请号:cn202010196573.1的一种菠萝仿生削皮去眼装置,包括框架、罩体、转动夹持装置、切削装置、去眼装置,框架外部设有罩体,罩体的一侧侧面敞口,框架内部设有平台支架,平台支架的下方设有可抽拉的收集盒,平台支架的上方连接切削装置,切削装置的上方的框架上设有转动夹持装置,罩体的顶部设有长条轨槽,长条轨槽内设有去眼装置,切削装置包括仿生齿刀,所述的转动夹持装置,包括摇盘、左插件、右插件,左插件和右插件相对同轴设置在框架上,左插件与设置在罩体外部的摇盘固定连接,左插件与框架转动连接,右插件通过轴孔与框架移动连接,该装置根据菠萝的大小可合理改变转动夹持装置的伸缩量和切削装置的夹持角度,模拟人们在用手或工具夹持时的动作,本发明特别适用于中小规模的菠萝去皮去眼。
3、上述文件中的装置模仿机械加工的方式,利用专用去眼刀旋转去眼,该方式也能减少人工提高效率,但加工效率和成功率受菠萝眼位置、图像识别定位精度及单个眼加工速度的影响,也不适合多机协同作业。
4、如申请号:cn202110978367.0的一种菠萝自动去眼装置,包括:固定旋转机构,用于固定待处理的菠萝并带动菠萝旋转;图像采集机构,架设于所述固定旋转机构上方,用于采集菠萝的外形图像;工控机,用于对所述菠萝的外形图像进行处理,识别所述菠萝的外形图像中菠萝眼的螺旋轨迹,并根据所述菠萝眼的螺旋轨迹生成行进控制指令;去眼执行机构,架设于所述固定旋转机构上方,用于根据所述行进控制指令带动菠萝刀按照所述菠萝眼的螺旋轨迹运动,并与所述固定旋转机构配合逐条切除菠萝眼。通过图像采集机构可以拍摄安装于固定旋转机构上的菠萝的外形图像,经工控机分析处理,可以根据识别到的菠萝眼的螺旋轨迹生成行进控制指令,进而控制去眼执行机构按照菠萝眼的螺旋轨迹运动,配合固定旋转机构带动菠萝旋转,可以准确、快速的切除菠萝眼,整个菠萝去眼的过程更加安全、高效。
5、上述文件中装置模仿人工沿菠萝螺旋线旋转去眼,但该方式同样受识别精度影响,且果肉损耗过大。而本发明提供的基于开源机械臂和机器视觉的菠萝去眼装置,利用机械臂灵活的特点,结合机器视觉技术,可实现对菠萝眼精准定位,且可实现多机协同作业,对减轻劳动强度,提高加工效率和降低损耗有重要意义。
6、所以我们提出了一种基于开源机械臂与机器视觉的菠萝去眼装置,以便于解决上述中提出的问题。
技术实现思路
1、本发明的目的在于提供一种基于开源机械臂与机器视觉的菠萝去眼装置,以解决上述背景技术提出的目前市场上的加工效率和成功率受菠萝眼位置的影响,不适合多机协同作业以及该方式同样受识别精度影响,且果肉损耗过大的问题。
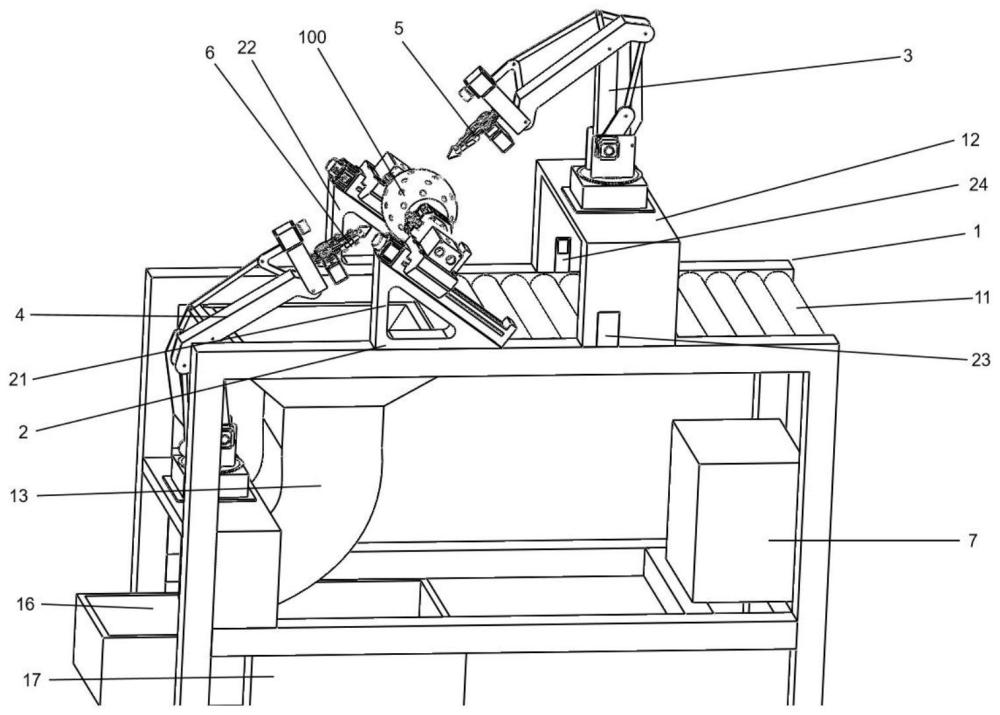
2、为实现上述目的,本发明提供如下技术方案:一种基于开源机械臂与机器视觉的菠萝去眼装置,包括第一去眼装置、第二去眼装置、将菠萝本体传送至目标位置的滚筒传送装置、用于夹紧固定菠萝本体送至预设位置且能带动菠萝本体绕预设轴线转动的夹持装置、通过深度相机进行菠萝眼识别定位并移动去眼装置到菠萝眼的第一机械臂和第二机械臂。
3、滚筒传送装置,所述滚筒传送装置的内部嵌套连接有于传送菠萝本体的滚筒输送线,且滚筒传送装置的上方固定连接有用于支撑第一机械臂的u型板,并且滚筒传送装置的下端固定连接有使菠萝本体掉落后到达预定位置的缓冲滑道,同时缓冲滑道的底部固定连接有用于缓冲菠萝本体掉落时的冲击力的第一弹簧板和第二弹簧板,所述缓冲滑道的外端定连接有收集去好眼的菠萝的菠萝收集箱以及收集菠萝去眼过程中掉落的菠萝眼的菠萝眼收集箱;
4、夹持装置,所述夹持装置固定连接在滚筒传送装置的上端,且夹持装置包括激光发生器以及激光接收器并且夹持装置的内部设置有夹持组件以及用来带动夹持组件移动的移动组件。
5、优选的,所述夹持组件包括第一夹持件,所述第一夹持件固定连接有第一伺服电机,且第一夹持件由第一伺服电机驱动进行旋转;
6、所述夹持组件包括第二夹持件,所述第二夹持件固定连接有第二伺服电机,且第二夹持件由第二伺服电机驱动进行旋转;
7、所述夹持组件包括第一双轴气缸,所述第一双轴气缸的驱动端固定连接有第一伺服电机,所述第二伺服电机与第二双轴气缸固定相连,所述第一夹持件与第二夹持件的中心轴线重合。
8、优选的,所述移动组件包括第一三角提升板和第二三角提升板,所述的第一三角提升板和第二三角提升板与滚筒传送装置相固定,所述第一三角提升板的斜面固定连接有第一丝杠支撑座;所述第二三角提升板的斜面固定连接有第二丝杠支撑座;
9、所述第一丝杠支撑座与第一丝杠本体相连,且第二丝杠支撑座与第二丝杠本体相连,并且第一丝杠本体和第一丝杠支撑座之间连接有第一丝杠滑块,同时第二丝杠本体和第二丝杠支撑座之间连接有第二丝杠滑块;
10、所述第一丝杠本体固定连接有第三伺服电机,且第三伺服电机驱动第一丝杠本体旋转来使第一丝杠滑块运动,所述第二丝杠本体固定连接有第四伺服电机,且第四伺服电机驱动第二丝杠本体旋转来使第二丝杠滑块运动。
11、优选的,所述第一机械臂包括底座,所述底座与滚筒传送装置直接相固定连接,所述底座与转盘相连并能使定位装置进行转动,且转盘的上方固定连接有第一挡板和第二挡板,并且第一挡板的外侧固定连接有第一步进电机,同时第二挡板的外侧固定连接有第二步进电机;
12、所述第一步进电机以及第二步进电机之间连接有驱动杆,且驱动杆分别固定于第一挡板和第二挡板一端,同时驱动杆连接有横杆,所述第一步进电机和第二步进电机对驱动杆进行驱动使得第一机械臂能够实现到达菠萝眼位置。
13、优选的,所述第二挡板的一侧连接有斜杆,且斜杆的另一端分别铰接接有第一连接杆和第二连接杆,并且第一连接杆另一端铰接有第三连接杆和横杆,同时第二连接杆另一端与第三连接杆连接,所述第三连接杆另一端固定连接有长杆,且长杆另一端固定连接有固定板,并且固定板前部连接有深度相机,同时固定板的底部连接第一去眼装置。
14、优选的,所述第一去眼装置包括安全扣,所述的安全扣分别与固定板固定相连,且安全扣与底板连接固定,所述底板上转动连接有第一齿轮机构与第二齿轮机构,且第一齿轮机构与第二齿轮机构两齿轮机构成啮合状态,所述第一齿轮机构和第二齿轮机构分别固定连接有第一机械手爪和第二机械手爪,且第一机械手爪与第二机械手爪能够贴合在一起。
15、优选的,所述底板和第一机械手爪之间连接有第一限位元件,且第一限位元件可对第一机械手爪起到限位,所述底板和第二机械手爪之间固定连接有第二限位元件,第二限位元件可对第二机械手爪起到限位;
16、所述底板固定连接有舵机,且舵机的转动轴与第二齿轮机构连接,并且舵机可驱动第二齿轮机构的转动,同时第二齿轮机构可带动第一齿轮机构转动,从而实现第一机械手爪和第二机械手爪的开合。
17、优选的,所述第一机械臂与第二机械臂为同一类型机械臂,所需零件均相同,所述第一去眼装置与第二去眼装置均为同一种装置,所需零件均相同。
18、优选的,所述控制器与所述滚筒传送装置、夹持装置、第一机械臂、第二机械臂、第一去眼装置和第二去眼装置相连接,固定于滚筒传送装置上。
19、与现有技术相比,本发明的有益效果是:
20、(1)机械手抓设计上采用仿菠萝眼形状设计,可更好的适应菠萝眼的大小,有效避免果肉浪费;
21、(2)与此同时,本发明具有安全性高,适用于工厂流水线工作、自动化程度高、可靠性高、易于控制等优点,且能够极大提高生产效率,节约生产成本;
22、(3)机械臂的布置也可以尽可能避免加工过程中,减少机械臂本体与菠萝或果眼接触,保证机械臂清洁和提高卫生条件,机械臂位置的布置也有利于防止去眼过程中果汁下滴对机械臂的污染,保证干净卫生;
23、(4)由去眼装置根据深度相机反馈的菠萝眼外径尺寸,通过舵机控制机械手爪张开相应的角度,当机械手爪到达菠萝眼表面时,舵机再次控制两个机械手爪合拢,在合拢过程中机械手爪深入到菠萝果肉,包裹住菠萝眼,合拢完成后机械臂带动去眼装置离开菠萝,从而实现菠萝本体精准、精量去眼,避免果肉浪费;
24、(5)滚筒输送线运行,菠萝本体随滚筒输送线传输,随后落入缓冲滑道,经第一弹簧板和第二弹簧板的缓冲,随着缓冲滑道滑落至下方的菠萝收集箱中,随菠萝本体一起滑落的菠萝眼则会在缓冲滑道的空隙中掉落到菠萝眼收集箱中。
- 还没有人留言评论。精彩留言会获得点赞!