一种配网输电线路多功能维护机器人的制作方法
本发明涉及巡线机器人,具体是一种配网输电线路多功能维护机器人。
背景技术:
1、配电网的输电线路长期经受太阳的暴晒、雨雪的侵蚀,经常出现电线老化造成漏电断电的现象。如果检修不及时,原本很容易修复的小型故障会演变成大规模的事故,造成难以想象的后果。
2、现有技术中输电线路的维护机器人大致可以分为两类:一类不具有自主越障功能,另一类则具有自主越障功能,现有的具有自主越障功能的维护机器人虽然可以可跨越高压输电线上的部分障碍物,但由机器人重量重的原因,使得机器人在翻越障碍物的过程中会出现机器人一端悬空,而另一端挂载在障碍物另一侧的电线上的情况,此时机器人上产生以机器人与电线的接触点为中心的重力扭矩,为了平衡该重力产生的扭矩,电线需对机器人产生一组反作用力,以抵消重力产生的扭矩,造成机器人翻越障碍的过程中,电线所受力的负载过大,易损伤电线。
技术实现思路
1、本发明的目的在于提供一种配网输电线路多功能维护机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
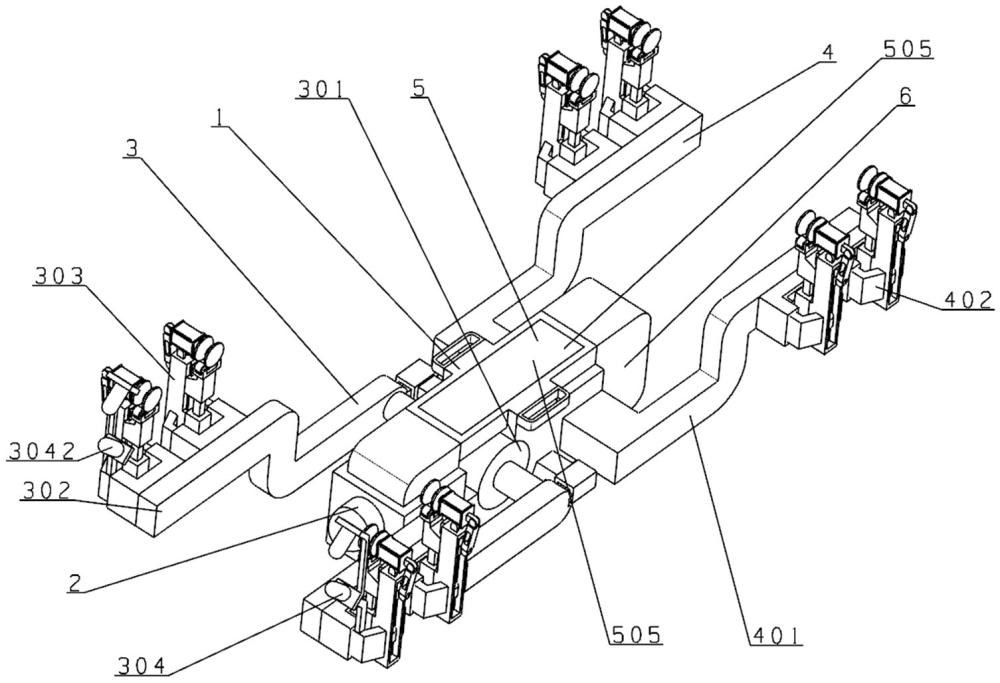
3、一种配网输电线路多功能维护机器人,包括机架,机架上安装有视觉反馈系统,还包括:
4、安装在机架上的越障夹线结构,所述越障夹线结构包括与机架固定连接的第一双出轴电机,所述第一双出轴电机的输出端固定安装有摆动臂,所述摆动臂上固定安装有多组第一沿线驱动机构,距离机架最远的两组第一沿线驱动机构上均安装有前置摄像机构;
5、安装在机架上的后置稳线结构,所述后置稳线结构包括与机架固定连接的两组连接臂,所述连接臂上安装有多组第二沿线驱动机构,所述第二沿线驱动机构与第一沿线驱动机构结构相同;
6、安装在机架上的气浮降载结构,气浮降载结构用于降低越障夹线结构对电线的负载,所述气浮降载结构包括固定安装在机架内的加压气瓶,所述加压气瓶通过三通头连接有两组控制阀,其中一组控制阀固定连接有分流头,分流头一端固定安装有与机架相连接的弹性气囊,所述分流头另一端固定连接有泄压阀。
7、作为本发明进一步的改进方案:所述第一沿线驱动机构包括与摆动臂固定连接的第一主动伸缩架,所述第一主动伸缩架上固定安装有导向架,所述导向架内固定安装有第一电机,所述第一电机的输出轴固定连接有丝杆,所述丝杆螺纹连接有滑动安装在导向架内的滑块,所述滑块通过铰接架铰接有与导向架相铰接的电机架,所述电机架上固定安装有第二电机,所述第二电机的输出轴固定连接有槽轮,所述导向架上固定安装有第二主动伸缩架,所述第二主动伸缩架的移动端固定安装有轮架,所述轮架上转动安装有压线轮,所述轮架上安装有制动部。
8、作为本发明进一步的改进方案:所述制动部包括滑动安装在轮架上的摩擦块,所述摩擦块具有铁磁性,所述摩擦块与轮架间安装有弹簧,所述轮架内固定安装有与摩擦块相适配的电磁铁。
9、作为本发明进一步的改进方案:所述前置摄像机构包括固定安装在第一主动伸缩架的伸缩臂上的立架,所述立架上对称安装有两组摄像头,所述摄像头与视觉反馈系统通信连接。
10、作为本发明进一步的改进方案:所述弹性气囊包括与分流头固定连接的内气囊,所述内气囊外部设置有外气囊,所述内气囊与外气囊间安装有弹性网。
11、作为本发明进一步的改进方案:所述机架上固定安装有垂线接地机构,所述垂线接地机构包括与机架固定连接的两组机箱,所述机箱内固定安装有第二双出轴电机,所述第二双出轴电机的输出端固定安装有绝缘轮,所述绝缘轮上绕装有导线,所述导线的一端固定安装有接电头,所述机架上固定安装有电压测量模块,所述电压测量模块与导线电连接,所述槽轮和压线轮均与电压测量模块电连接。
12、作为本发明进一步的改进方案:所述机箱内固定安装有电动断线钳。
13、与现有技术相比,本发明的有益效果是:
14、在未遇到障碍时,第一沿线驱动机构和第二沿线驱动机构均在输电线路上并为机器人的移动提供动力,期间前置摄像机构实时拍摄输电线路并通过视觉反馈系统将输电线路画面传输至地面操纵端,在遇到线路上的障碍时,第一沿线驱动机构脱离输电线路,而后使用第一双出轴电机驱动摆动臂偏转,从而降低第一沿线驱动机构的高度,而后在第二沿线驱动机构的驱动下,本机器人移动向障碍,而后第一双出轴电机带动摆动臂移动向输电线路,第一沿线驱动机构夹持输电线路,而后第二沿线驱动机构脱离输电线路,第一双出轴电机带动机架与摆动臂发生相对偏转,从而使得机架高度降低,且加压气瓶通过三通头和控制阀对分流头供给高压气体,高压气体沿分流头进入弹性气囊中,从而使得弹性气囊膨胀,从而使得本机器人获取浮力,从而降低第一沿线驱动机构对输电线路施加的力,而后第一沿线驱动机构带动本机器人沿输电线路移动,使得机架和第二沿线驱动机构越过障碍,而后在第一双出轴电机的带动下,机架转动,机架通过连接臂带动第二沿线驱动机构移动向输电线路,期间控制阀关闭,泄压阀开启,从而使得弹性气囊收缩并排出空气,而后第二沿线驱动机构重新夹持到输电线路上。本发明通过越障夹线结构、后置稳线结构、气浮降载结构间的配合,使得本发明在输电线路上巡检同时进行高效越障,且在越障过程中,使用气浮降载结构为本发明提供浮力和反重力的扭矩,从而降低本发明在越障过程中对输电线路的压力,便于本发明稳定越过输电线路上的障碍。
技术特征:
1.一种配网输电线路多功能维护机器人,包括机架,机架上安装有视觉反馈系统,其特征在于,还包括:
2.根据权利要求1所述的一种配网输电线路多功能维护机器人,其特征在于,所述第一沿线驱动机构包括与摆动臂固定连接的第一主动伸缩架,所述第一主动伸缩架上固定安装有导向架,所述导向架内固定安装有第一电机,所述第一电机的输出轴固定连接有丝杆,所述丝杆螺纹连接有滑动安装在导向架内的滑块,所述滑块通过铰接架铰接有与导向架相铰接的电机架,所述电机架上固定安装有第二电机,所述第二电机的输出轴固定连接有槽轮,所述导向架上固定安装有第二主动伸缩架,所述第二主动伸缩架的移动端固定安装有轮架,所述轮架上转动安装有压线轮,所述轮架上安装有制动部。
3.根据权利要求2所述的一种配网输电线路多功能维护机器人,其特征在于,所述制动部包括滑动安装在轮架上的摩擦块,所述摩擦块具有铁磁性,所述摩擦块与轮架间安装有弹簧,所述轮架内固定安装有与摩擦块相适配的电磁铁。
4.根据权利要求2所述的一种配网输电线路多功能维护机器人,其特征在于,所述前置摄像机构包括固定安装在第一主动伸缩架的伸缩臂上的立架,所述立架上对称安装有两组摄像头,所述摄像头与视觉反馈系统通信连接。
5.根据权利要求1所述的一种配网输电线路多功能维护机器人,其特征在于,所述弹性气囊包括与分流头固定连接的内气囊,所述内气囊外部设置有外气囊,所述内气囊与外气囊间安装有弹性网。
6.根据权利要求2所述的一种配网输电线路多功能维护机器人,其特征在于,所述机架上固定安装有垂线接地机构,所述垂线接地机构包括与机架固定连接的两组机箱,所述机箱内固定安装有第二双出轴电机,所述第二双出轴电机的输出端固定安装有绝缘轮,所述绝缘轮上绕装有导线,所述导线的一端固定安装有接电头,所述机架上固定安装有电压测量模块,所述电压测量模块与导线电连接,所述槽轮和压线轮均与电压测量模块电连接。
7.根据权利要求6所述的一种配网输电线路多功能维护机器人,其特征在于,所述机箱内固定安装有电动断线钳。
技术总结
本发明涉及巡线机器人技术领域,具体是一种配网输电线路多功能维护机器人,包括机架,还包括:安装在机架上的越障夹线结构;安装在机架上的后置稳线结构;安装在机架上的气浮降载结构,气浮降载结构包括固定安装在机架内的加压气瓶,加压气瓶通过三通头连接有两组控制阀,其中一组控制阀连接有分流头,分流头一端固定安装有弹性气囊,所述分流头另一端固定连接有泄压阀。本发明通过越障夹线结构、后置稳线结构、气浮降载结构间的配合,使得本发明在输电线路上巡检同时进行高效越障,且在越障过程中,使用气浮降载结构为本发明提供浮力和反重力的扭矩,从而降低本发明在越障过程中对输电线路的压力,便于本发明稳定越过输电线路上的障碍。
技术研发人员:郭延春,李强,王琮证
受保护的技术使用者:内蒙古北科交大机器人有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!