一种微重力链式组装系统的制作方法
本发明涉及航天器在轨构建,特别涉及种微重力链式组装方法。
背景技术:
1、在空间科学和军事应用领域不断提出极具挑战性的航天任务,如地外行星生命探测、电子侦察与遥感探测等,迫切需要发展百米级反射面天线、平面阵天线、太阳能阵面。传统的展开技术受折展机构运动副、运载火箭推力与整流罩包络等限制,存在折展机构复杂、在轨展开可靠性低,天线尺寸大、地面低重力模拟实验难度大等难题,无法完全满足上述超大型空间结构的构建需求。在轨组装技术解耦了火箭发射段模块之间的机械连接,可突破火箭推力、整流罩包络限制,具有结构效率高、扩展性强、可逐步升级等特性,特别适合构建大尺寸、高精度、高比刚度空间结构。然而,由于空间机器人移动速度慢、定位精度低(如典型的5m尺度太空机械臂的末端定位精度为±5mm),难以在大挠性基座上大范围高效移动,为减少在轨装配操作步骤、提高任务可靠度,有必要进行大尺寸模块(10米级)的组装操作。地面大尺寸模块的装配任务一般由专用工装分布式支撑配合,实现所有待连接点的高精度对准与定位;然而精度较低的太空机器人不具备同时对准大模块周边所有接头的能力。
2、因此,基于太空微重力环境下大尺寸模块的重力变形可以忽略的优点,急需探索一种利用低精度机器人多轴(多接口)、高效、高刚度装配大尺寸模块单元的方法,发展太空便捷、高效的组装工艺。
技术实现思路
1、本发明所解决的技术问题是:本发明的目的在于提供一种太空机器人高效装配大尺寸模块的微重力链式组装方法,以解决大跨度多组接头的对准装配难题。
2、本发明所采用的技术方案是:为实现上述目的,本发明提供了一种微重力链式组装系统,包括航天器平台、组装基座、机器人和待装的模块或多模块组合;
3、所述航天器平台为轨道微重力环境中具有姿态和轨迹控制能力的卫星、空间站和其它空间设施平台,组装基座与航天器平台刚性连接,机器人通过末端工具固定于组装基座上,模块或多模块组合通过可拆卸的连接预先固定于航天器平台或组装基座上,且在机器人的拾取范围内。
4、进一步的,所述组装基座上的接头包括需由机器人辅助对准连接的根接头、无需机器人辅助对准连接的链接头;所述模块或多模块组合上的接头包括需由机器人辅助对准连接的根接头、无需机器人辅助对准连接的链接头,分别与组装基座上的根接头、链接头一一对应,且互为阴接头和阳接头;
5、所述链接头从根接头位置开始由近及远依次为第一组链接头、第二组链接头、…、第n组链接头,n≥1;
6、所述根接头在机器人辅助对准下完成装配锁定后,模块或多模块组合上的第一组链接头与组装基座上第1组链接头被动进入捕获域并启动完成对接装配,同时下一组链接头被动进入捕获域并启动完成对接装配,由此重复,n组链接头依次进入捕获域,并依次地完成无需机器人辅助对准的对接装配。
7、进一步的,所述的组装基座为结构体,或为展开机构,或为前序装配得到的固接模块或模块组合。
8、进一步的,所述的机器人为基座固定的机械臂,或为具有移动功能的攀爬机器人,或为由其它工具携带移动的机器人;
9、进一步的,所述根接头对准捕获容差大于机器人进行模块或模块组对准时产生的位姿偏差,根接头锁定后的定位精度使得第一组链接头被动进入捕获域;第i组链接头锁定后的定位精度使得第i+1组链接头被动进入捕获域,i=1,2,3,…,n。
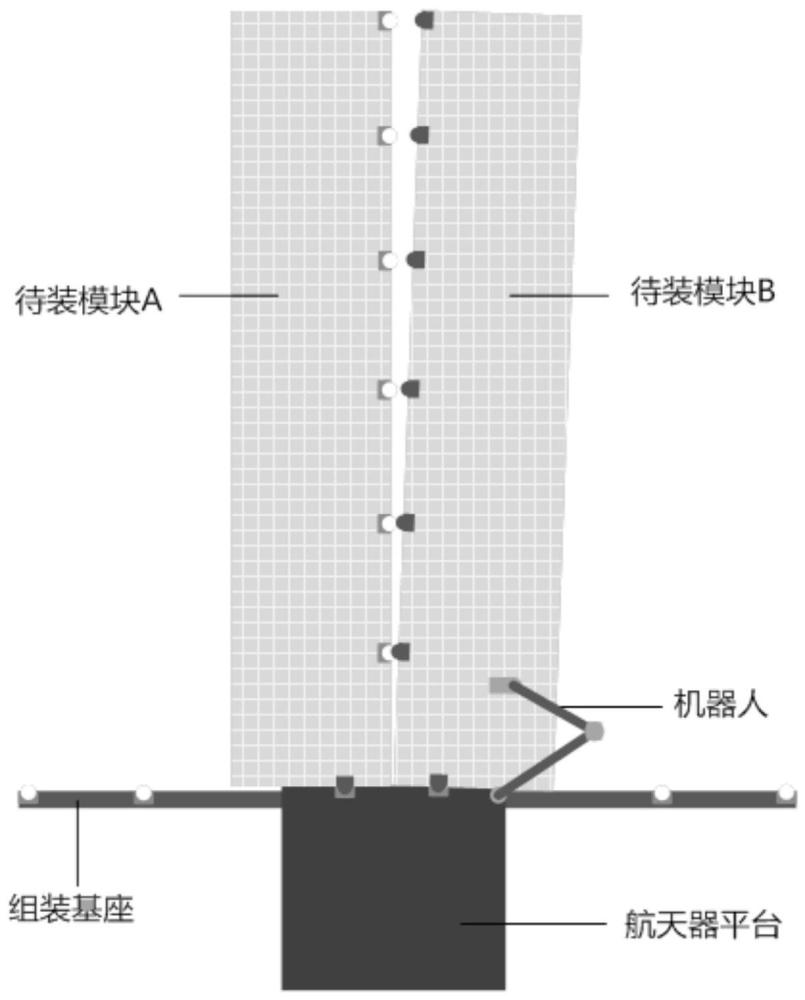
10、一种太空链式组装系统,包括航天器平台、组装基座、机器人和至少2个待装的模块或多模块组合;
11、所述航天器平台为轨道微重力环境中具有姿态和轨迹控制能力的卫星、空间站和其它空间设施平台,组装基座与航天器平台刚性连接,机器人通过末端工具固定于组装基座上,待装的模块或多模块组合通过可拆卸的连接预先固定于航天器平台或组装基座上,且在机器人的拾取范围内。
12、进一步的,所述组装基座上的接头为需由机器人辅助对准连接的根接头;
13、所述待装的模块或多模块组合上的接头包括需由机器人辅助对准连接的根接头、无需机器人辅助对准连接的链接头,所述待装的模块或多模块组合上的根接头与组装基座上的根接头互为阴接头和阳接头,链接头与相邻模块或模块组合上的链接头一一对应,且互为阴接头和阳接头;
14、所述链接头从根接头位置开始由近及远依次为第一组链接头、第二组链接头、…、第n组链接头,n≥1;
15、所述根接头在机器人辅助对准下完成装配锁定后,相邻模块或多模块组合上的第一组链接头被动进入捕获域并启动完成对接装配,同时下一组链接头被动进入捕获域并启动完成对接装配,由此重复,相邻模块或模块组合之间的n组链接头依次进入捕获域,并依次地完成无需机器人辅助对准的对接装配。
16、进一步的,所述的组装基座为结构体,或为展开机构,或为前序装配得到的固接模块或模块组合。
17、进一步的,所述的机器人为基座固定的机械臂,或为具有移动功能的攀爬机器人,或为由其它工具携带移动的机器人;
18、进一步的,所述根接头对准捕获容差大于机器人进行模块或模块组对准时产生的位姿偏差,根接头锁定后的定位精度使得第一组链接头被动进入捕获域;第i组链接头锁定后的定位精度使得第i+1组链接头被动进入捕获域,i=1,2,3,…,n。
19、本发明与现有技术相比的有益效果是:
20、(1)本发明满足了机器人便捷装配空间大尺寸模块的构建目标,具体为长条形、三角形、四边形、六边形等模块,其周边包含多组依序排列根接头、链接头,通过链式装配无需机器人一次性对准模块周边的所有接头,大幅降低了机器人末端定位精度要求,匹配了主流太空机械臂的操控能力,通过机器人执行少量就近根接头的装配,降低了装配任务对于机器人的精度、力控性能要求;
21、(2)本发明的根接头的初始定位能力,以及前序链接头的接力定位能力,为后续链接头的依序装配提供了对准捕获条件,无需机器人直接接入,提高了在轨装配的效率。
技术特征:
1.一种微重力链式组装系统,其特征在于,包括航天器平台、组装基座、机器人和待装的模块或多模块组合;
2.根据权利要求1所述的一种微重力链式组装系统,其特征在于,所述组装基座上的接头包括需由机器人辅助对准连接的根接头、无需机器人辅助对准连接的链接头;所述模块或多模块组合上的接头包括需由机器人辅助对准连接的根接头、无需机器人辅助对准连接的链接头,分别与组装基座上的根接头、链接头一一对应,且互为阴接头和阳接头;
3.根据权利要求2所述的一种微重力链式组装系统,其特征在于,所述的组装基座为结构体,或为展开机构,或为前序装配得到的固接模块或模块组合。
4.根据权利要求3所述的一种微重力链式组装系统,其特征在于,所述的机器人为基座固定的机械臂,或为具有移动功能的攀爬机器人,或为由其它工具携带移动的机器人。
5.根据权利要求4所述的一种微重力链式组装系统,其特征在于,所述根接头对准捕获容差大于机器人进行模块或模块组对准时产生的位姿偏差,根接头锁定后的定位精度使得第一组链接头被动进入捕获域;第i组链接头锁定后的定位精度使得第i+1组链接头被动进入捕获域,i=1,2,3,…,n。
6.一种太空链式组装系统,其特征在于,包括航天器平台、组装基座、机器人和至少2个待装的模块或多模块组合;
7.根据权利要求6所述的一种太空链式组装系统,其特征在于,所述组装基座上的接头为需由机器人辅助对准连接的根接头;
8.根据权利要求7所述的一种太空链式组装系统,其特征在于,所述的组装基座为结构体,或为展开机构,或为前序装配得到的固接模块或模块组合。
9.根据权利要求8所述的一种太空链式组装系统,其特征在于,所述的机器人为基座固定的机械臂,或为具有移动功能的攀爬机器人,或为由其它工具携带移动的机器人。
10.根据权利要求9所述的一种太空链式组装系统,其特征在于,所述根接头对准捕获容差大于机器人进行模块或模块组对准时产生的位姿偏差,根接头锁定后的定位精度使得第一组链接头被动进入捕获域;第i组链接头锁定后的定位精度使得第i+1组链接头被动进入捕获域,i=1,2,3,…,n。
技术总结
本发明提供一种微重力链式组装系统,包括航天器平台、组装基座、机器人和待装的模块或多模块组合;所述航天器平台为轨道微重力环境中具有姿态和轨迹控制能力的卫星、空间站和其它空间设施平台,组装基座与航天器平台刚性连接,机器人通过末端工具固定于组装基座上,模块或多模块组合通过可拆卸的连接预先固定于航天器平台或组装基座上,且在机器人的拾取范围内。本发明用以解决大跨度多组接头的对准装配难题。
技术研发人员:曾令斌,唐平,田建东,解春雷,邢思远,张怡壮,孟繁敏
受保护的技术使用者:中国航天科技创新研究院
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!