并联主操作手的控制方法及装置、机器人与流程
本公开涉及机器人,尤其涉及一种并联主操作手的控制方法及装置、机器人。
背景技术:
1、诸如主从遥操作机器人的机器人技术被广泛应用于危险空间的探索、大众娱乐、工业生产、医疗服务等领域。遥操作机器人系统一般可以包括主操作手系统和从端系统,主操作手系统可以作为操作者与机器人之间的交互设备,其会向从端系统传递操作者给出的位姿、速度等信息,同时也可向操作者传递从端系统受到的力/力矩等环境信息,以使操作者具有操作临场感,可及时对从端系统的运动做有效的控制和干预。
2、机器人的主操作手系统可以包括用于与操作者进行交互的并联机构,并联机构是一种具有彼此连接的动平台和静平台的运动机构,动平台和静平台上可对应地形成有关节,动平台和静平台上的对应的关节可以通过支链等连接组件连接。
3、在现有的并联主操作手运动中,由于并联主操作手的工作范围有限,使得在使用过程中易达到限位,或遇到奇异点而产生卡顿、甚至卡死的情况,这会导致操作者的操作被限制,影响操作的自由性。
技术实现思路
1、本公开提供一种并联主操作手的控制方法及装置、机器人,以至少解决相关技术中并联主操作手的运动受限的问题。本公开的技术方案如下:
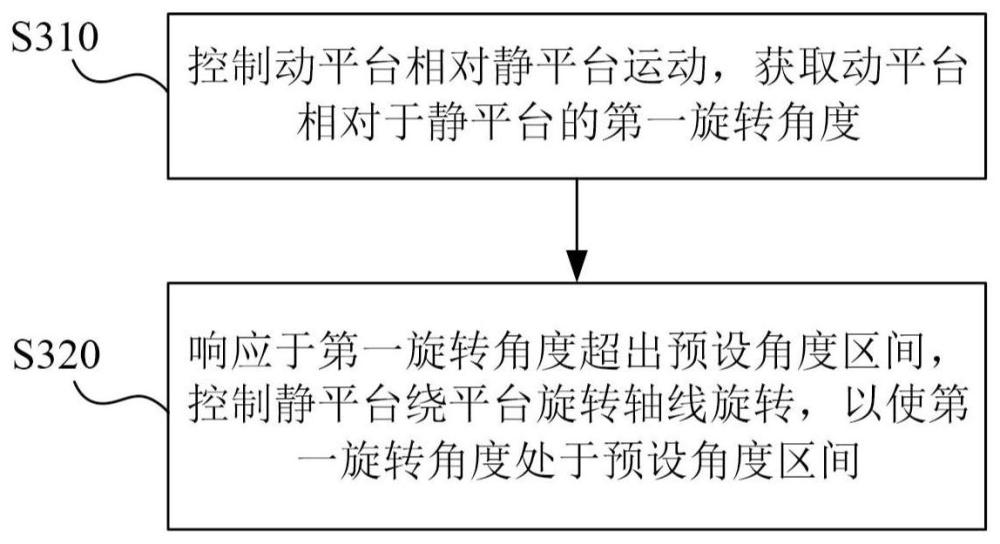
2、根据本公开实施例的第一方面,提供一种并联主操作手的控制方法,所述并联主操作手包括静平台、动平台和连接支链,所述静平台形成有至少三个第一位置,所述动平台形成有与所述至少三个第一位置一一对应的至少三个第二位置,每个连接支链对应于所述静平台和所述动平台的对应的第一位置和第二位置,所述静平台能够绕平台旋转轴线旋转,所述平台旋转轴线垂直于所述至少三个第一位置所形成的平面,其中,所述控制方法包括:控制所述动平台相对所述静平台运动,获取所述动平台相对于所述静平台的第一旋转角度;响应于所述第一旋转角度超出预设角度区间,控制所述静平台绕所述平台旋转轴线旋转,以使所述第一旋转角度处于预设角度区间。
3、可选地,所述第一旋转角度为所述动平台绕所述平台旋转轴线转动的欧拉角。
4、可选地,所述控制所述静平台绕所述平台旋转轴线旋转,包括:保持所述动平台不动,控制所述静平台绕所述平台旋转轴线旋转,并且使每个连接支链的至少一部分跟随所述静平台运动。
5、可选地,每个连接支链在对应的第一位置和第二位置之间的跨度是可调节的,其中,所述使每个连接支链的至少一部分跟随所述静平台运动,包括:调节每个连接支链在对应的第一位置和第二位置之间的跨度,并且使每个连接支链相对于所述静平台转动以及相对于所述动平台转动。
6、可选地,所述控制所述静平台绕所述平台旋转轴线旋转,包括:控制所述静平台绕所述平台旋转轴线旋转角度补偿量△θs,使所述第一旋转角度等于目标角度,其中,所述角度补偿量△θs为所述第一旋转角度与所述目标角度的差值,其中,所述目标角度处于所述预设角度区间。
7、可选地,所述目标角度为0;或者,在预判所述动平台下一步动作趋势是往所述第一旋转角度为0的方向的前提下,在所述第一旋转角度大于所述预设角度区间的上限值时,所述目标角度为正值;在所述第一旋转角度小于所述预设角度区间的下限值时,所述目标角度为负值。
8、可选地,所述控制所述静平台绕所述平台旋转轴线旋转,包括:控制所述静平台绕所述平台旋转轴线朝向所述第一旋转角度的旋转方向旋转。
9、可选地,所述预设角度区间为[-10°,10°]。
10、可选地,所述预设角度区间为[-5°,5°]。
11、可选地,所述第一旋转角度在所述动平台的运动过程中实时获取;或者,所述第一旋转角度在所述动平台的运动停止后获取。
12、可选地,所述控制方法还包括:响应于所述第一旋转角度处于所述预设角度区间,控制所述静平台保持不动。
13、可选地,通过以下方式确定所述第一旋转角度:根据所述并联主操作手的关节参量,确定所述动平台与所述静平台之间的第一位置转换关系;根据所述第一位置转换关系,确定所述第一旋转角度,其中,所述关节参量包括每个第二位置与对应的第一位置之间在对应的连接支链的调节方向上的距离以及每个第二位置相对于对应的第一位置旋转的旋转变化量。
14、可选地,所述根据所述并联主操作手的关节参量,确定所述动平台与所述静平台之间的第一位置转换关系,包括:根据所述并联主操作手的关节参量,确定每个第二位置相对于所述静平台的位置;基于每个第二位置相对于所述静平台的位置,确定所述第一位置转换关系。
15、可选地,每个第二位置相对于对应的第一位置能够绕第一旋转轴线和第二旋转轴线旋转,所述第一旋转轴线和所述第二旋转轴线彼此垂直,其中,所述旋转变化量包括第二位置相对于对应的第一位置绕第一旋转轴线的第一旋转变化量和/或第二位置相对于对应的第一位置绕第二旋转轴线的第二旋转变化量。
16、可选地,所述根据所述并联主操作手的关节参量,确定每个第二位置相对于所述静平台的位置,包括:根据每个第二位置与对应的第一位置之间在对应的连接支链的调节方向上的距离,确定每个第二位置相对于对应的第一位置在对应的连接支链方向上的位置;根据每个第二位置相对于对应的第一位置旋转的旋转变化量,确定第二位置转换关系,其中,所述第二位置转换关系为第一参照物与第二参照物之间的位置转换关系,所述第一参照物以每个第一位置和第一旋转轴线为参照,所述第二参照物以每个第一位置和第二旋转轴线为参照;确定每个第一位置相对于所述静平台的位置;根据每个第二位置相对于对应的第一位置在对应的连接支链方向上的位置、所述第二位置转换关系以及每个第一位置相对于所述静平台的位置,确定每个第二位置相对于所述静平台的位置。
17、可选地,所述第一位置转换关系为动坐标系与静坐标系之间的第一坐标转换关系,其中,所述静坐标系的位置相对于所述至少三个第一位置固定,所述动坐标系的位置相对于所述至少三个第二位置固定,其中,所述第二位置转换关系为每个第一位置处的第一坐标系与每个第一位置处的第二坐标系之间的第二坐标转换关系,其中,所述第一坐标系的坐标原点位于对应的第一位置处,所述第一坐标系的坐标轴线中的一者为所述第一旋转轴线,所述第二坐标系的坐标原点位于对应的第一位置处,所述第二坐标系的坐标轴中的一者为所述第二旋转轴线,其中,通过以下方式确定每个第二位置相对于所述静平台的位置:根据每个第二位置与对应的第一位置之间在对应的连接支链的调节方向上的距离,确定每个第二位置在所述第一坐标系下的位置坐标;根据每个第二位置相对于对应的第一位置旋转的旋转变化量,确定所述第二坐标转换关系;根据每个第一位置在所述静平台上的位置,确定每个第一位置处的第一坐标系与所述静坐标系之间的第三坐标转换关系;根据所述位置坐标、所述第二坐标转换关系以及所述第三坐标转换关系,确定每个第二位置在所述静坐标系下的位置坐标,以确定每个第二位置相对于所述静平台的位置。
18、可选地,所述控制方法还包括:根据所述静平台相对于预设的参考位置绕所述平台旋转轴线旋转的第二旋转角度,确定所述参考位置与所述静平台之间的第三位置转换关系,其中,所述参考位置相对于大地固定不动;根据所述第一位置转换关系和所述第三位置转换关系,确定所述动平台相对于所述参考位置的位姿参量,其中,所述位姿参量用于表征所述动平台相对于所述参考位置的位置和姿态,其中,所述位姿参量包括动坐标系的坐标原点在参考坐标系下的坐标以及所述动坐标系绕自身的三个坐标轴线依次旋转的旋转角度,其中,所述动坐标系的位置相对于所述至少三个第二位置固定,其中,所述第三位置转换关系为静坐标系与参考坐标系之间的第三坐标转换关系,其中,所述静坐标系的位置相对于所述至少三个第一位置固定,所述参考坐标系的位置相对于所述参考位置固定。
19、根据本公开实施例的第二方面,提供一种并联主操作手的控制装置,所述并联主操作手包括静平台、动平台和连接支链,所述静平台形成有至少三个第一位置,所述动平台形成有与所述至少三个第一位置一一对应的至少三个第二位置,每个连接支链对应于所述静平台和所述动平台的对应的第一位置和第二位置,所述静平台能够绕平台旋转轴线旋转,所述平台旋转轴线垂直于所述至少三个第一位置所形成的平面,其中,所述控制装置包括:获取单元,被配置为控制所述动平台相对所述静平台运动,获取所述动平台相对于所述静平台的第一旋转角度;控制单元,被配置为响应于所述第一旋转角度超出预设角度区间,控制所述静平台绕所述平台旋转轴线旋转,以使所述第一旋转角度处于预设角度区间。
20、根据本公开实施例的第三方面,提供一种机器人,所述机器人包括并联主操作手,所述并联主操作手包括静平台、动平台和连接支链,所述静平台形成有至少三个第一位置,所述动平台形成有与所述至少三个第一位置一一对应的至少三个第二位置,每个连接支链对应于所述静平台和所述动平台的对应的第一位置和第二位置,所述静平台能够绕平台旋转轴线旋转,所述平台旋转轴线垂直于所述至少三个第一位置所形成的平面,其中,所述机器人还包括:存储器,所述存储器存储有计算机程序;处理器,所述处理器执行存储在所述存储器中的计算机程序以实现根据本公开的示例性实施例所述的并联主操作手的控制方法。
21、根据本公开实施例的第四方面,提供一种计算机可读存储介质,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行根据本公开的示例性实施例所述的并联主操作手的控制方法。
22、根据本公开实施例的第五方面,提供一种计算机程序产品,包括计算机指令,所述计算机指令被处理器执行时实现根据本公开的示例性实施例所述的并联主操作手的控制方法。
23、根据本公开的示例性实施例的机器人的控制方法及装置、机器人,通过使得静平台能够绕平台旋转轴线旋转,可以响应于动平台相对于静平台的第一旋转角度超出预设角度区间,控制静平台绕平台旋转轴线旋转,从而可以释放并联机构的运动限制,以确保并联主操作手能够顺利操作和运动,避免卡顿或卡死。
24、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!