一种可靠的机器人快换工装的制作方法
本发明涉及工装夹具,具体涉及一种可靠的机器人快换工装。
背景技术:
1、机械手作为自动化领域中一种基础设备,被广泛用于各种物体的抓取。为了使机械手能够适应不同大小、不同形状的各种物体的抓取,通常会为机械手配备不同的夹具,从而在抓取不同物体时,需要更换配套的夹具,较为麻烦;现有的夹具是在夹具固定板上打孔,然后通过螺栓固定在机械手上,这种方式不仅会浪费大量的更换时间,在夹具制造过程中也需要对每个夹具固定板进行打孔,费时费力。
技术实现思路
1、(一)要解决的技术问题
2、为解决上述问题,本发明提出了一种结构简单,易于定位,夹取速度快的可靠的机器人快换工装。
3、(二)技术方案
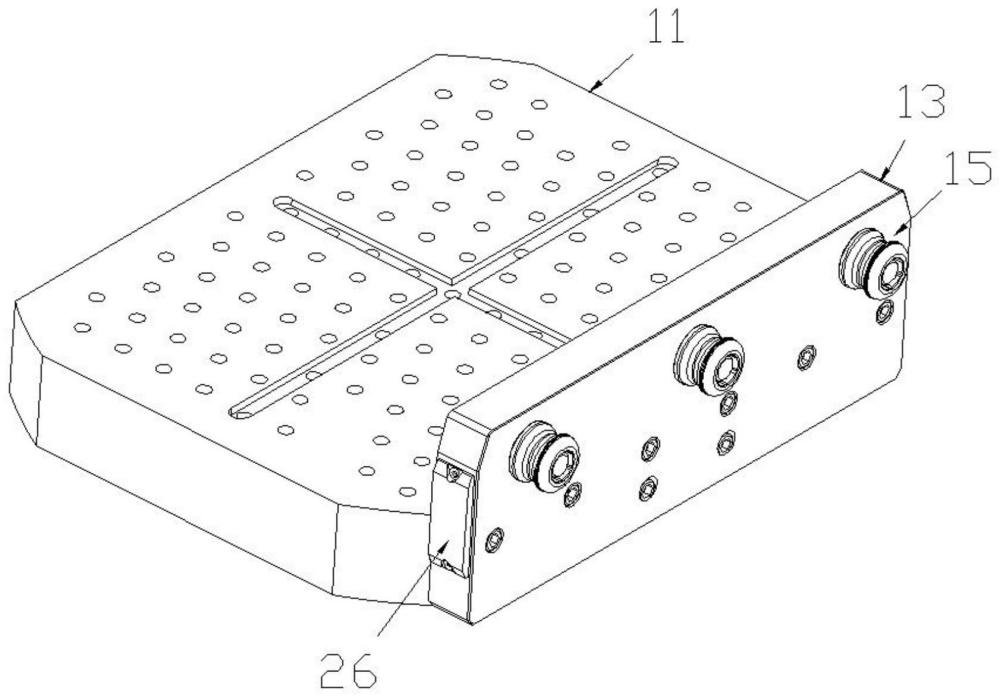
4、本发明的一种可靠的机器人快换工装,包括:机械手、设置在机械手一端的夹具以及与夹具适配的托盘,其中,所述机械手可进行多角度调节旋转,所述夹具包括固定板以及多个零点定位器,而所述托盘上还设有用于进行夹紧固定的安装板,所述安装板上固定设置有与零点定位器配合进行定位安装的锁紧件,所述锁紧件朝向远离托盘一侧设置。
5、在本发明中,所述锁紧件中空设有贯穿的腔体,在所述腔体一端设有连接部,所述锁紧件可通过紧固件设置在所述安装板上,而所述锁紧件的外侧的中部设有与零点定位器配合限位的凹槽。
6、在本发明中,所述凹槽与锁紧件的两侧之间还设有光滑的过渡弧面。
7、在本发明中,所述紧固件为螺栓,而所述连接部为设置在空腔内壁上的连接螺纹,所述锁紧件通过螺纹配合设置在安装板上。
8、在本发明中,所述机械手包括旋转座、转动设置在旋转座上的底座、转动设置在底座上的第一延伸臂、转动设置在第一延伸臂另一端的第二延伸臂以及转动设置在第二延伸臂端部的连接臂,所述夹具设置在所述连接臂的端部。
9、在本发明中,所述底座可在旋转座上进行周向360°旋转,所述第一延伸臂与第二延伸臂则为纵向摆动旋转,其中,所述第一延伸臂与第二延伸臂之间通过球轴进行连接,在第一延伸臂与第二延伸臂上均设有用于提供旋转动力的驱动电机。
10、在本发明中,所述连接臂与所述夹具之间通过螺栓进行固定。
11、在本发明中,在所述固定板的侧部设有用于检测夹具夹装位置的检测模块,而所述安装板上设有与检测模块配合的信号发出模块,通过两者之间的无线信号通信来实现夹具夹装位置的确定。
12、(三)有益效果
13、相比于现有技术,本发明的有益效果为:
14、(1)本发明中采用零点定位器与托盘进行夹装,从而替代传统的机械手进行抓取,不仅有效加快了机械手对工件的夹取速度,还实现了夹具标准化,大大降低了制造特制夹具所需的成本,经济效益更高。
15、(2)本发明中在锁紧件的中部设置有配合零点定位器的凹槽,而凹槽的两侧还设有过渡弧面,其有效防止锁紧件磨损,并且增加了锁紧件插入零点定位器的顺滑度,十分可靠。
技术特征:
1.一种可靠的机器人快换工装,
2.根据权利要求1所述的可靠的机器人快换工装,其特征在于,所述锁紧件中空设有贯穿的腔体,在所述腔体一端设有连接部,所述锁紧件可通过紧固件设置在所述安装板上,而所述锁紧件的外侧的中部设有与零点定位器配合限位的凹槽。
3.根据权利要求2所述的可靠的机器人快换工装,其特征在于,所述凹槽与锁紧件的两侧之间还设有光滑的过渡弧面。
4.根据权利要求3所述的可靠的机器人快换工装,其特征在于,所述紧固件为螺栓,而所述连接部为设置在空腔内壁上的连接螺纹,所述锁紧件通过螺纹配合设置在安装板上。
5.根据权利要求1-4任一项所述的可靠的机器人快换工装,其特征在于,所述机械手包括旋转座、转动设置在旋转座上的底座、转动设置在底座上的第一延伸臂、转动设置在第一延伸臂另一端的第二延伸臂以及转动设置在第二延伸臂端部的连接臂,所述夹具设置在所述连接臂的端部。
6.根据权利要求5所述的可靠的机器人快换工装,其特征在于,所述底座可在旋转座上进行周向360°旋转,所述第一延伸臂与第二延伸臂则为纵向摆动旋转,其中,所述第一延伸臂与第二延伸臂之间通过球轴进行连接,在第一延伸臂与第二延伸臂上均设有用于提供旋转动力的驱动电机。
7.根据权利要求6所述的可靠的机器人快换工装,其特征在于,所述连接臂与所述夹具之间通过螺栓进行固定。
8.根据权利要求7所述的可靠的机器人快换工装,其特征在于,在所述固定板的侧部设有用于检测夹具夹装位置的检测模块,而所述安装板上设有与检测模块配合的信号发出模块,通过两者之间的无线信号通信来实现夹具夹装位置的确定。
技术总结
本发明公开了一种可靠的机器人快换工装,包括机械手、设置在机械手一端的夹具以及与夹具适配的托盘,其中,所述机械手可进行多角度调节旋转,所述夹具包括固定板以及多个零点定位器,而所述托盘上还设有用于进行夹紧固定的安装板,所述安装板上固定设置有与零点定位器配合进行定位安装的锁紧件,所述锁紧件朝向远离托盘一侧设置。本发明采用零点定位器与托盘进行夹装,从而替代传统的机械手进行抓取,不仅有效加快了机械手对工件的夹取速度,还实现了夹具标准化,大大降低了制造特制夹具所需的成本,经济效益更高。
技术研发人员:邓华伟,吴俊强,刘付钦,张奕晨,张时宇,肖勇
受保护的技术使用者:宁波智能成型技术创新中心有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!