姿态样条的构造方法、装置及可读存储介质与流程
本申请涉及机器人,特别是涉及一种姿态样条的构造方法、装置及可读存储介质。
背景技术:
1、对于机器人来说,可以让机器人的工具中心点途径多个预先设置的示教点移动。这些示教点之间可以用ptp指令、line指定等运动。然而本申请的发明人发现,在经过设置的示教点时,机器人末端执行器姿态因为缺乏连续性,会发生突变而导致机器人运动不平滑。
技术实现思路
1、本申请提供一种姿态样条的构造方法、装置及可读存储介质,能够保证机器人的平滑运动。
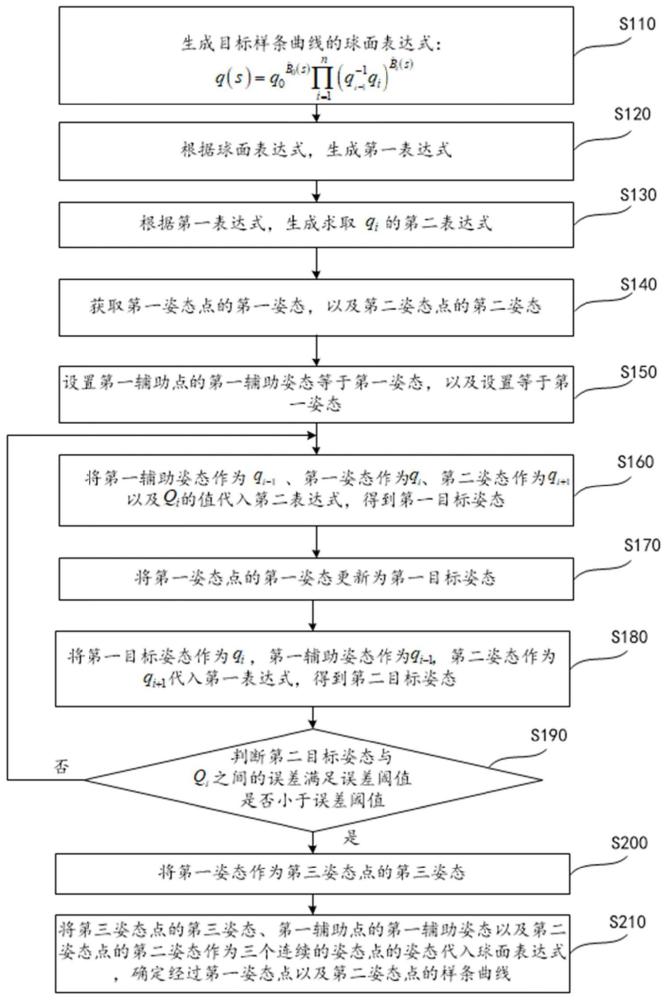
2、本申请实施例第一方面提供一种姿态样条的构造方法,所述方法包括:生成目标样条曲线的球面表达式为:其中,qi为所述目标样条曲线上控制点的姿态,i为所述控制点的序号,0≤i≤n,当所求取的目标姿态点位于控制点qi-1之前时,当所求取的目标姿态点位于控制点qi-1与控制点qi之间时,当所求取的目标姿态点位于控制点qi之后时,bi,n(s)为所述目标样条曲线上序号为i的控制点对应的基函数;根据所述球面表达式,生成第一表达式:其中,qi-1、qi以及qi+1为相邻的三个控制点的姿态;根据所述第一表达式,生成求取qi的第二表达式,其中,第二表达式的自变量包括qi-1、qi、qi+1以及qi;获取第一姿态点的第一姿态,以及第二姿态点的第二姿态;设置第一辅助点的第一辅助姿态等于所述第一姿态,以及设置qi等于所述第一姿态;将所述第一辅助姿态作为qi-1、所述第一姿态作为qi、第二姿态作为qi+1以及qi的值代入所述第二表达式,得到第一目标姿态;将所述第一姿态点的所述第一姿态更新为所述第一目标姿态;将所述第一姿态作为qi,所述第一辅助姿态作为qi-1,第二姿态作为qi+1代入所述第一表达式,得到第二目标姿态;响应于所述第二目标姿态与qi之间的误差小于误差阈值,将所述第一姿态作为第三姿态点的第三姿态,否则返回所述将所述第一辅助姿态作为qi-1、所述第一姿态作为qi、第二姿态作为qi+1以及qi的值代入所述第二表达式,得到第一目标姿态的步骤;将所述第三姿态点的所述第三姿态、所述第一辅助点的所述第一辅助姿态以及所述第二姿态点的所述第二姿态作为三个连续的姿态点的姿态代入所述球面表达式,确定经过所述第一姿态点以及所述第二姿态点的样条曲线。
3、本申请实施例第二方面提供一种构造装置,所述构造装置包括:元生成模块,用于生成目标样条曲线的球面表达式为:其中,qi为所述目标样条曲线上控制点的姿态,i为所述控制点的序号,0≤i≤n,当所求取的目标姿态点位于控制点qi-1之前时,当所求取的目标姿态点位于控制点qi-1与控制点qi之间时,当所求取的目标姿态点位于控制点qi之后时,bi,n(s)为所述目标样条曲线上序号为i的控制点对应的基函数;第一生成模块,与所述球面表达式连接,用于根据所述球面表达式,生成第一表达式:其中,qi-1、qi以及qi+1为相邻的三个控制点的姿态;第二生成模块,与所述第一生成模块连接,用于根据所述第一表达式,生成求取qi的第二表达式,其中,第二表达式的自变量包括qi-1、qi、qi+1以及qi;获取模块,用于获取第一姿态点的第一姿态,以及第二姿态点的第二姿态;设置模块,与所述获取模块连接,用于设置第一辅助点的第一辅助姿态等于所述第一姿态,以及设置qi等于所述第一姿态;第一代入模块,与所述设置模块连接,用于将所述第一辅助姿态作为qi-1、所述第一姿态作为qi、第二姿态作为qi+1以及qi的值代入所述第二表达式,得到第一目标姿态;更新模块,与所述第一代入模块连接,用于将所述第一姿态点的所述第一姿态更新为所述第一目标姿态;第二代入模块,与所述更新模块连接,用于将所述第一姿态作为qi,所述第一辅助姿态作为qi-1,第二姿态作为qi+1代入所述第一表达式,得到第二目标姿态;迭代模块,与所述第二代入模块连接,用于响应于所述第二目标姿态与qi之间的误差小于误差阈值,将所述第一姿态作为第三姿态点的第三姿态,否则返回所述将所述第一辅助姿态作为qi-1、所述第一姿态作为qi、第二姿态作为qi+1以及qi的值代入所述第二表达式,得到第一目标姿态的步骤;曲线模块,与所述迭代模块连接,用于将所述第三姿态点的所述第三姿态、所述第一辅助点的所述第一辅助姿态以及所述第二姿态点的所述第二姿态作为三个连续的姿态点的姿态代入所述球面表达式,确定经过所述第一姿态点以及所述第二姿态点的样条曲线。
4、本申请实施例第三方面提供一种构造装置,所述构造装置包括处理器、存储器以及通信电路,所述处理器分别耦接所述存储器、所述通信电路,所述存储器中存储有程序数据,所述处理器通过执行所述存储器内的所述程序数据以实现上述方法中的步骤。
5、本申请实施例第四方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序能够被处理器执行以实现上述方法中的步骤。
6、有益效果是:本申请给定相邻两个点的姿态之后,可以根据这两个点的姿态求取另一个点的姿态,使得该三个点构成连续的三个点,从而相比较于通过给定的两个点的姿态求取的样条曲线,本申请通过三个点的姿态求取的样条曲线更加平滑,从而可以保证机器人的平滑运行。
技术特征:
1.一种姿态样条的构造方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述目标样条曲线为贝塞尔曲线,其中,表示从n个控制点中不重复地选择i个控制点进行组合的组合数量,
3.根据权利要求2所述的方法,其特征在于,所述根据所述第一表达式,生成求取qi的第二表达式的步骤,包括:
4.根据权利要求2所述的方法,其特征在于,所述确定经过所述第一姿态点以及所述第二姿态点的样条曲线的步骤,包括:
5.一种构造装置,其特征在于,所述构造装置包括:
6.根据权利要求5所述的构造装置,其特征在于,所述目标样条曲线为贝塞尔曲线,其中,
7.根据权利要求6所述的构造装置,其特征在于,所述第二生成模块具体用于:按照如下公式确定所述第二表达式:
8.根据权利要求6所述的构造装置,其特征在于,所述曲线模块具体用于:
9.一种构造装置,其特征在于,所述构造装置包括处理器以及存储器,所述处理器耦接所述存储器,所述存储器中存储有程序数据,所述处理器通过执行所述存储器内的所述程序数据以实现如权利要求1-4任一项所述方法中的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序能够被处理器执行以实现如权利要求1-4任一项所述方法中的步骤。
技术总结
本申请公开了一种姿态样条的构造方法、装置及可读存储介质,该方法包括:生成目标样条曲线的球面表达式;根据球面表达式,生成第一表达式;根据第一表达式,生成求取q<subgt;i</subgt;的第二表达式;获取第一姿态点的第一姿态,以及第二姿态点的第二姿态;设置第一辅助点的第一辅助姿态等于第一姿态,以及设置Q<subgt;i</subgt;等于第一姿态;将第一辅助姿态、第一姿态、第二姿态以及Q<subgt;i</subgt;代入第二表达式,得到第一目标姿态;将第一姿态点的第一姿态更新为第一目标姿态;将第一目标姿态,第一辅助姿态,第二姿态代入第一表达式,得到第二目标姿态;响应于第二目标姿态与Q<subgt;i</subgt;之间的误差小于误差阈值,确定经过第一姿态点、第二姿态点的样条曲线。通过本申请的方法,可以保证机器人的平滑运行。
技术研发人员:付未
受保护的技术使用者:北京配天技术有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!