一种外骨骼机器人腿掌自动调节伸缩机构
本申请属于智能控制领域,具体涉及一种外骨骼机器人腿掌自动调节伸缩机构。
背景技术:
1、外骨骼机器人是指能够增强人类保护自身能力的一种可穿戴机电设备,从单一的穿戴电子类产品,逐渐发展成一种机电、智能和仿生的融合技术。随着对医疗需求的增长,医用外骨骼康复机器人开始成为康复机器人研究的一个重要方向,越来越多的研究所和企业投入到医用外骨骼机器人的研究中。外骨骼康复机器人是中风、脊髓损伤引起的运动障碍康复训练的重要技术手段和方法。
2、目前下肢外骨骼机器人处于快速发展阶段,研究方向着重点是提高智能控制,却忽略了一些基础内容。使用对象体型存在很大差异,脚掌的长度也各不相同,这使得同一种设备并不能适用于所有人,对于 契合较差的人群康复效果反而会变差。如何使得同一种下肢外骨骼机器人能满足不通人群的脚掌长度,即实现下肢外骨骼机器人的脚掌长度可调节,是本实用新型的目的。
技术实现思路
1、基于此,本实用新型提供一种下肢外骨骼机器人脚掌自动调节伸缩机构,以解决康复效果不佳的问题以及达到降低整体成本的目的。
2、其技术内容为,
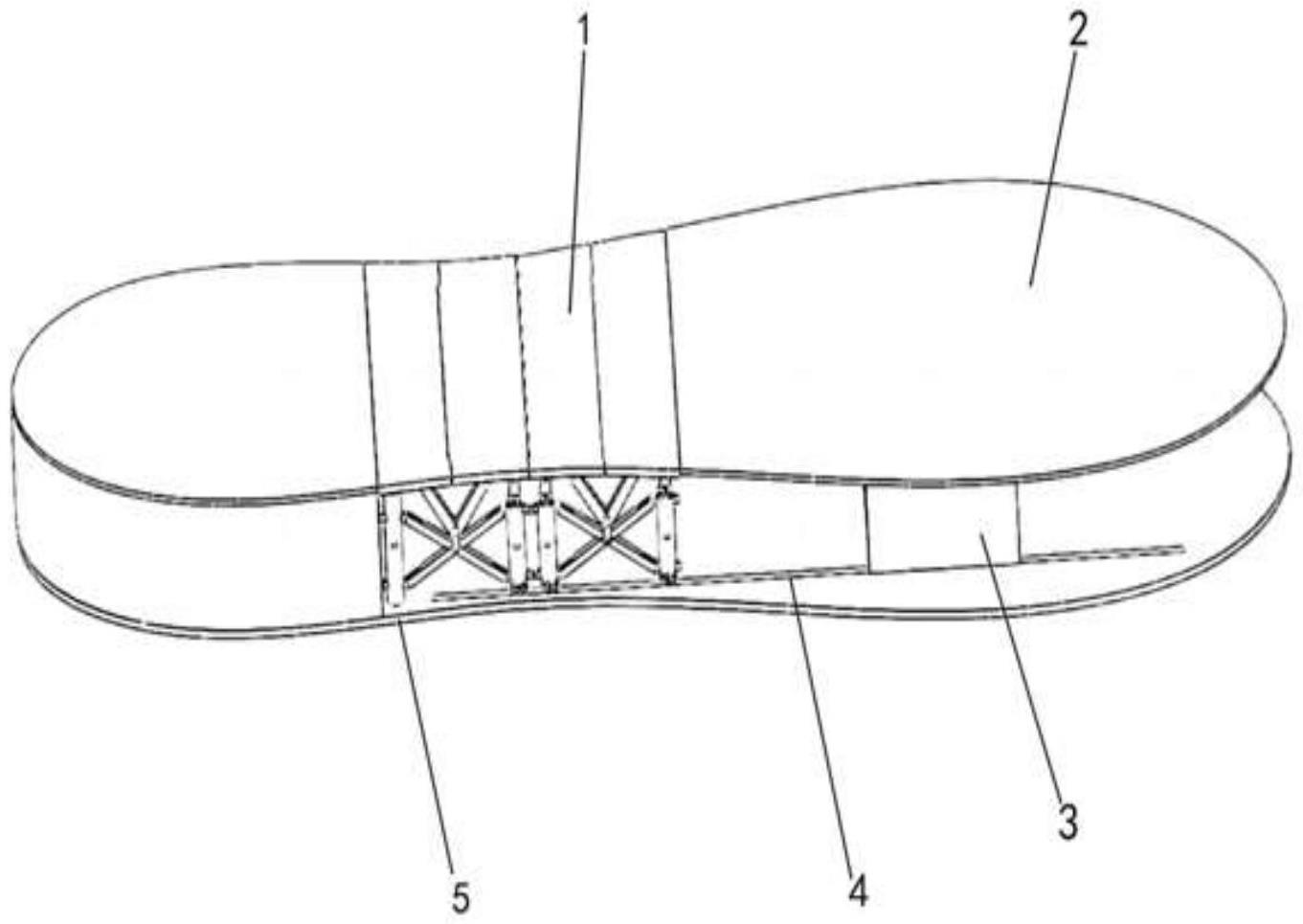
3、一种外骨骼机器人腿掌自动调节伸缩机构,包括脚掌上板、底板和电机;所述脚掌上板和底板之间设有折叠装置,所述电机位于机箱内,通过连杆与折叠装置固定连接;所述机箱底部设有一对滚轮和一对定向轮,所述底板上设有滑轨,所述机箱和折叠装置可沿滑轨滑动。
4、优选的,所述折叠装置包括多块折叠板,相邻两块折叠板之间设于四根支撑杆,沿滑轨方向同侧的两个支撑杆之间设有定位十字架,所述定位十字架与y型支架通过支撑短板连接,所述y型支架的两端分别与两块折叠板铰接,所述支撑杆底部设有滚轮。
5、优选的,所述脚掌上板和底板之间的镂空结构用于设置折叠装置和电机,其脚底部分为实体结构。
6、优选的,所述脚掌上板上设有长度传感器,所述长度传感器、电机均与控制器连接,所述脚掌上板上方设有乳胶垫。
7、与现有技术相比,本实用新型具有的优点和积极效果是:
8、当使用者在穿戴下肢外骨骼机器人时,长度传感器会通过判断使用者的脚长并将信号输送到控制器,控制器将信号进行处理,处理完的信号传输到电机装置,电机装置控制箱体开始运动并通过连杆带动后面折叠伸缩装置运动到合适位置,这样康复机器人的脚掌部位就能适应不同人群,同时节约了成本。
技术特征:
1.一种外骨骼机器人腿掌自动调节伸缩机构,其特征在于,包括脚掌上板、底板和电机;所述脚掌上板和底板之间设有折叠装置,所述电机位于机箱内,通过连杆与折叠装置固定连接;所述机箱底部设有一对滚轮和一对定向轮,所述底板上设有滑轨,所述机箱和折叠装置可沿滑轨滑动。
2.根据权利要求1所述的一种外骨骼机器人腿掌自动调节伸缩机构,其特征在于,所述折叠装置包括多块折叠板,相邻两块折叠板之间设于四根支撑杆,沿滑轨方向同侧的两个支撑杆之间设有定位十字架,所述定位十字架与y型支架通过支撑短板连接,所述y型支架的两端分别与两块折叠板铰接,所述支撑杆底部设有滚轮。
3.根据权利要求1所述的一种外骨骼机器人腿掌自动调节伸缩机构,其特征在于,所述脚掌上板和底板之间的镂空结构用于设置折叠装置和电机,其脚底部分为实体结构。
4.根据权利要求1所述的一种外骨骼机器人腿掌自动调节伸缩机构,其特征在于,所述脚掌上板上设有长度传感器,所述长度传感器、电机均与控制器连接,所述脚掌上板上方设有乳胶垫。
技术总结
本申请公开了一种外骨骼机器人腿掌自动调节伸缩机构,包括脚掌上板、底板和电机;所述脚掌上板和底板之间设有折叠装置,所述电机位于机箱内,通过连杆与折叠装置固定连接;所述机箱底部设有一对滚轮和一对定向轮,所述底板上设有滑轨,所述机箱和折叠装置可沿滑轨滑动。其优点在于,脚掌自动调节伸缩机构利用长度传感装置对使用者的脚长进行测量,实现脚掌上板的可调节。
技术研发人员:李琨鹏,王优强
受保护的技术使用者:青岛理工大学
技术研发日:20230105
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!