一种智能养老机器人的制作方法
本技术涉及养老机器人相关领域,具体为一种智能养老机器人。
背景技术:
1、为了解决老人独居的空虚问题,各类产家纷纷推出养老机器人;
2、例如公开号为cn211278426u的授权专利(多功能养老机器人):包括贮藏仓、小型电机和螺纹杆,所述贮藏仓的右侧外壁与小型电机的左端固定连接,所述贮藏仓的左侧内壁与螺纹杆的左端活动连接。该多功能养老机器人,通过设置小型电机、螺纹杆、传动板,小型电机带动螺纹杆转动,传动板在螺纹杆上移动,储物板与储药架在传动板的带动下移动至储藏仓外部,人们通过贮藏仓顶端开设的贯穿槽,拉动横杆,横杆通过第一连杆、第二连杆带动储药架上升至较高处,且储药架与储物板上的物品存放区域可完全移至储藏仓的外部,无需在内部翻找,解决了目前老人取放养老机器人内部的物品时,需要大幅弯腰甚至下蹲的问题;
3、由此可见,目前阶段的养老机器人无法满足辅助老人生活使用,只能进行简单的服务,而机器人手臂和手掌采用抛光后较为光滑,手持物品容易滑落,不够稳定,且当需要机器人帮忙拿东西时,机器人无法及时找到,浪费时间,虽然存在收纳空间,但无法对收纳的物品和存放量进行显示,后期翻找较为繁琐。
技术实现思路
1、本实用新型的目的在于提供一种智能养老机器人,以解决上述背景技术中提出的养老机器人无法满足辅助老人生活使用,只能进行简单的服务,而机器人手臂和手掌采用抛光后较为光滑,手持物品容易滑落,不够稳定,且当需要机器人帮忙拿东西时,机器人无法及时找到,浪费时间,虽然存在收纳空间,但无法对收纳的物品和存放量进行显示,后期翻找较为繁琐的问题。
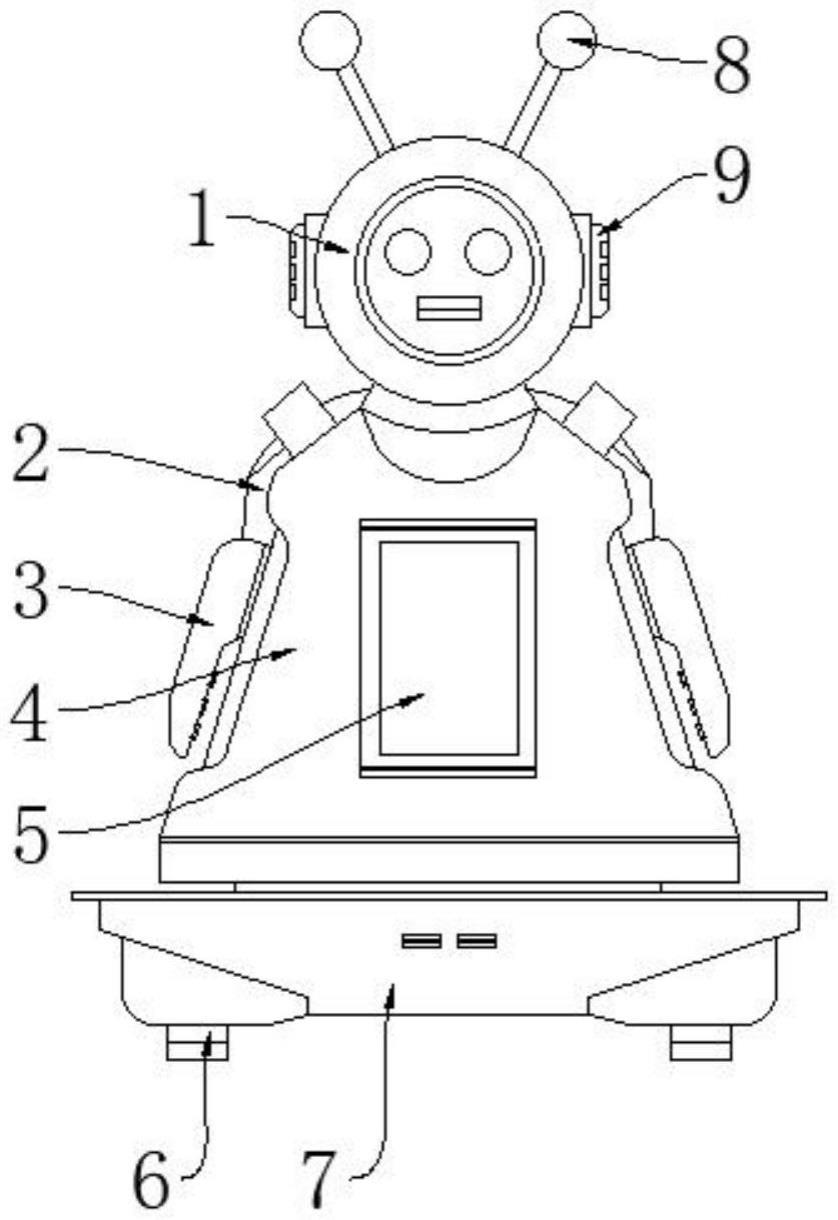
2、为实现上述目的,本实用新型提供如下技术方案:一种智能养老机器人,包括机器人头部、收纳包、手臂、机身、触摸式控制面板和移动座,所述机身的正面中部设有触摸式控制面板,所述机身的两侧设有手臂,所述机身的底部设有移动座,所述机身的顶部设有机器人头部,所述机器人头部的两侧和顶部两侧分别设有语音指令接收口和天线,所述收纳包设在机身的背部,所述触摸式控制面板输出端与手臂、电动万向轮、机器人头部和红外感应头输入端电性连接。
3、在进一步的实施例中,所述手臂的内侧壁设有多个气动吸盘,且手臂的端部与机身通过转轴连接。
4、在进一步的实施例中,所述收纳包的内部设有收纳腔,所述收纳腔的内部靠上位置处的两侧设有红外感应头。
5、在进一步的实施例中,所述机身的底端设有旋转轴,所述移动座的顶端中部设有轴承,且旋转轴与轴承转动连接。
6、在进一步的实施例中,所述移动座的顶部两侧设有加宽的弧形结构的放物架,所述放物架的顶部设有隔架。
7、在进一步的实施例中,所述电动万向轮共设有六个,且六个电动万向轮分别设在移动座的底部拐角处,所述移动座的内部设有电机,且电机输出轴与机身底部的旋转轴连接。
8、与现有技术相比,本实用新型的有益效果是:
9、1、该实用新型的机身的两侧设有手臂,在手臂上气动吸盘,使其可以结束到物品时,自动吸附固定,确保物品携带过程的稳定性,使其可以协助老人搬运或携带较重的物品,增大其功能性。
10、2、该实用新型的机身的背部设有收纳包,在收纳包的内侧壁设有红外感应头,通过红外感应头可以对加入或拿出的物品进行扫描并记录,可以实时了解收纳包内存在哪些物品,当老人需要拿一些生活用品时,机器人可以自动移动至跟前,后背面对老人,即可根据需要拿走所需物品,使用方便,可以确保用品始终保持存在,增大其自我管理的性能。
技术特征:
1.一种智能养老机器人,包括机器人头部(1)、收纳包(2)、手臂(3)、机身(4)、触摸式控制面板(5)和移动座(7),其特征在于:所述机身(4)的正面中部设有触摸式控制面板(5),所述机身(4)的两侧设有手臂(3),所述机身(4)的底部设有移动座(7),所述机身(4)的顶部设有机器人头部(1),所述机器人头部(1)的两侧和顶部两侧分别设有语音指令接收口(9)和天线(8),所述收纳包(2)设在机身(4)的背部,所述触摸式控制面板(5)输出端与手臂(3)、电动万向轮(6)、机器人头部(1)和红外感应头(13)输入端电性连接。
2.根据权利要求1所述的一种智能养老机器人,其特征在于:所述手臂(3)的内侧壁设有多个气动吸盘(12),且手臂(3)的端部与机身(4)通过转轴连接。
3.根据权利要求1所述的一种智能养老机器人,其特征在于:所述收纳包(2)的内部设有收纳腔(14),所述收纳腔(14)的内部靠上位置处的两侧设有红外感应头(13)。
4.根据权利要求1所述的一种智能养老机器人,其特征在于:所述机身(4)的底端设有旋转轴,所述移动座(7)的顶端中部设有轴承(11),且旋转轴与轴承(11)转动连接。
5.根据权利要求1所述的一种智能养老机器人,其特征在于:所述移动座(7)的顶部两侧设有加宽的弧形结构的放物架(10),所述放物架(10)的顶部设有隔架。
6.根据权利要求1所述的一种智能养老机器人,其特征在于:所述电动万向轮(6)共设有六个,且六个电动万向轮(6)分别设在移动座(7)的底部拐角处,所述移动座(7)的内部设有电机,且电机输出轴与机身(4)底部的旋转轴连接。
技术总结
本技术公开了一种智能养老机器人,包括机器人头部、收纳包、手臂、机身、触摸式控制面板和移动座,所述机身的正面中部设有触摸式控制面板,所述机身的两侧设有手臂,所述机身的底部设有移动座,所述机身的顶部设有机器人头部,所述机器人头部的两侧和顶部两侧分别设有语音指令接收口和天线,所述收纳包设在机身的背部,所述触摸式控制面板输出端与手臂、电动万向轮、机器人头部和红外感应头输入端电性连接。该技术的机身的两侧设有手臂,在手臂上气动吸盘,使其可以结束到物品时,自动吸附固定,确保物品携带过程的稳定性,使其可以协助老人搬运或携带较重的物品,增大其功能性。
技术研发人员:周现生,徐凯
受保护的技术使用者:上海辛骋电子科技有限公司
技术研发日:20230106
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!