一种全自动夹持上料机械手的制作方法
本技术涉及上料机械手,具体为一种全自动夹持上料机械手。
背景技术:
1、机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、现有的上料机械手在上料时大多直接将板状工件抓取,抓取后的板状工件在完成上料后难以进行送料,上料机械手只能将板状工件进行上料,难以实现上料后的推料送料,需要人工进行辅助推料。
技术实现思路
1、本实用新型的目的在于提供一种全自动夹持上料机械手,以解决上述背景技术中提出的问题。
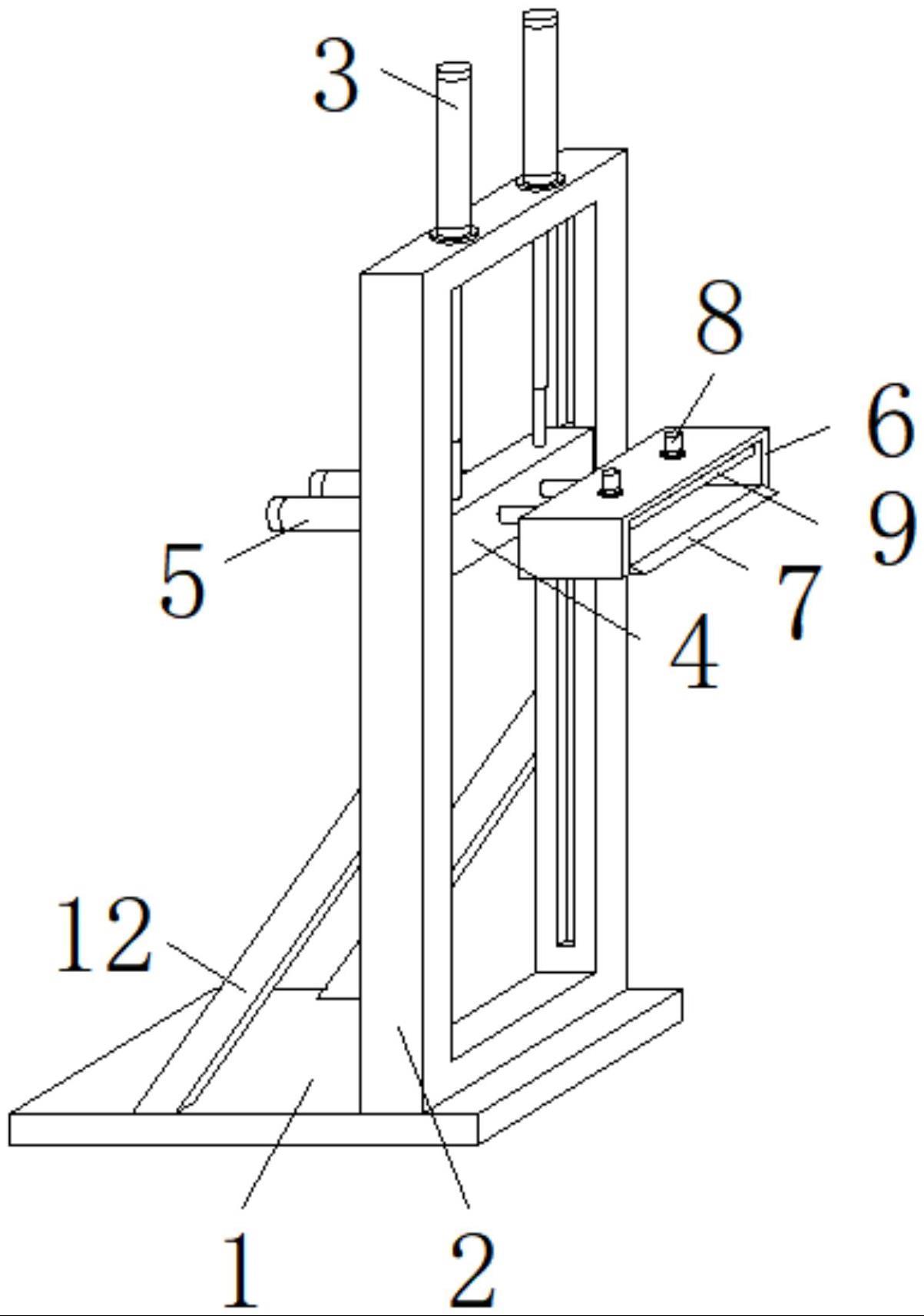
2、为实现上述目的,本实用新型提供如下技术方案:一种全自动夹持上料机械手,包括底座,所述底座的顶部通过螺栓固定连接有固定架,所述固定架的顶部通过螺栓固定连接有第一气缸,所述第一气缸通过其一侧的输出端固定连接有升降块,所述升降块的一侧外壁上通过螺栓固定连接有第二气缸,所述第二气缸通过其一侧的输出端固定连接有夹持框,所述夹持框上远离升降块的一侧外壁上设置有铲板,且夹持框的顶部通过螺栓固定连接有第三气缸,所述第三气缸通过其一侧的输出端固定连接有夹持板,所述夹持框上远离铲板的一侧外壁上通过螺栓固定连接有第四气缸,所述第四气缸通过其一侧的输出端固定连接有推板,所述底座和固定架之间通过螺栓固定连接有支撑板。
3、与现有技术相比,本实用新型的有益效果是:该全自动夹持上料机械手,通过夹持框升降和铲料,可以实现板状工件的夹持、升降,从而可以将板状工件输送至所需的高度,并在推板的横向推动下,可以实现板状工件的推料上料,进而使得上料机械手具有全自动夹持推料送料功能,无需人工进行辅助推料。
技术特征:
1.一种全自动夹持上料机械手,包括底座(1),其特征在于:所述底座(1)的顶部通过螺栓固定连接有固定架(2),所述固定架(2)的顶部通过螺栓固定连接有第一气缸(3),所述第一气缸(3)通过其一侧的输出端固定连接有升降块(4),所述升降块(4)的一侧外壁上通过螺栓固定连接有第二气缸(5),所述第二气缸(5)通过其一侧的输出端固定连接有夹持框(6),所述夹持框(6)上远离升降块(4)的一侧外壁上设置有铲板(7),且夹持框(6)的顶部通过螺栓固定连接有第三气缸(8),所述第三气缸(8)通过其一侧的输出端固定连接有夹持板(9),所述夹持框(6)上远离铲板(7)的一侧外壁上通过螺栓固定连接有第四气缸(10),所述第四气缸(10)通过其一侧的输出端固定连接有推板(11),所述底座(1)和固定架(2)之间通过螺栓固定连接有支撑板(12)。
2.根据权利要求1所述的一种全自动夹持上料机械手,其特征在于:所述底座(1)和固定架(2)之间的角度为90度。
3.根据权利要求1所述的一种全自动夹持上料机械手,其特征在于:所述固定架(2)的横截面为矩形框式结构,所述升降块(4)和固定架(2)之间滑动连接。
4.根据权利要求1所述的一种全自动夹持上料机械手,其特征在于:所述第一气缸(3)共设置有两个,且两个第一气缸(3)对称设置在固定架(2)的顶部。
5.根据权利要求1所述的一种全自动夹持上料机械手,其特征在于:所述夹持框(6)为一侧开口的空心长方体结构。
6.根据权利要求1所述的一种全自动夹持上料机械手,其特征在于:所述推板(11)和夹持框(6)之间滑动连接。
7.根据权利要求1所述的一种全自动夹持上料机械手,其特征在于:所述夹持板(9)和推板(11)相互错位。
8.根据权利要求1所述的一种全自动夹持上料机械手,其特征在于:所述铲板(7)的横截面为直角三角形。
技术总结
本技术公开了一种全自动夹持上料机械手,包括底座,所述底座的顶部通过螺栓固定连接有固定架,所述固定架的顶部通过螺栓固定连接有第一气缸,所述第一气缸通过其一侧的输出端固定连接有升降块,所述升降块的一侧外壁上通过螺栓固定连接有第二气缸,所述第二气缸通过其一侧的输出端固定连接有夹持框,所述夹持框上远离升降块的一侧外壁上设置有铲板。该全自动夹持上料机械手,通过夹持框升降和铲料,可以实现板状工件的夹持、升降,从而可以将板状工件输送至所需的高度,并在推板的横向推动下,可以实现板状工件的推料上料,进而使得上料机械手具有全自动夹持推料送料功能,无需人工进行辅助推料。
技术研发人员:张志刚
受保护的技术使用者:良笠精密机械(宁波)有限公司
技术研发日:20230109
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!