一种多维度操控灵活型巡检机器人的制作方法
本技术涉及巡检机器人,尤其涉及一种多维度操控灵活型巡检机器人。
背景技术:
1、随着我国电网系统的不断发展与完善,变电站、电力线的覆盖范围越来越广,为了保障电力的正常供应,通常需要定期对变电站以及电力线路进行巡检,以及时发现电网系统中出现的故障或隐患。现有先进电力行业针对变电站室外设备及电力线路的巡检,采用巡检机器人代替人工进行巡检。
2、机器人平台为巡检机器人检测装置的载体,具有图像、温度、声音、气体采集功能、自主定位功能、自主避障功能。可实现对设备的运行状态,设备的温度、湿度采集,环境监测,声音采集、视觉识别。
3、现有先进巡检机器人,通过使用通过性较强的差速移动底盘,具备大范围场景下的自主导航能力,上层采用六自由度协作机械臂,在巡检过程中灵活性较强,可深入各个复杂角落采集数据。
4、巡检机器人的机械臂直接固定在机身顶部,为了保证机械臂的灵活性,机械臂的关节长度较短,机械臂整体树立起来时高度较低,而较高的位置无法进行巡检,使用效果较差。
技术实现思路
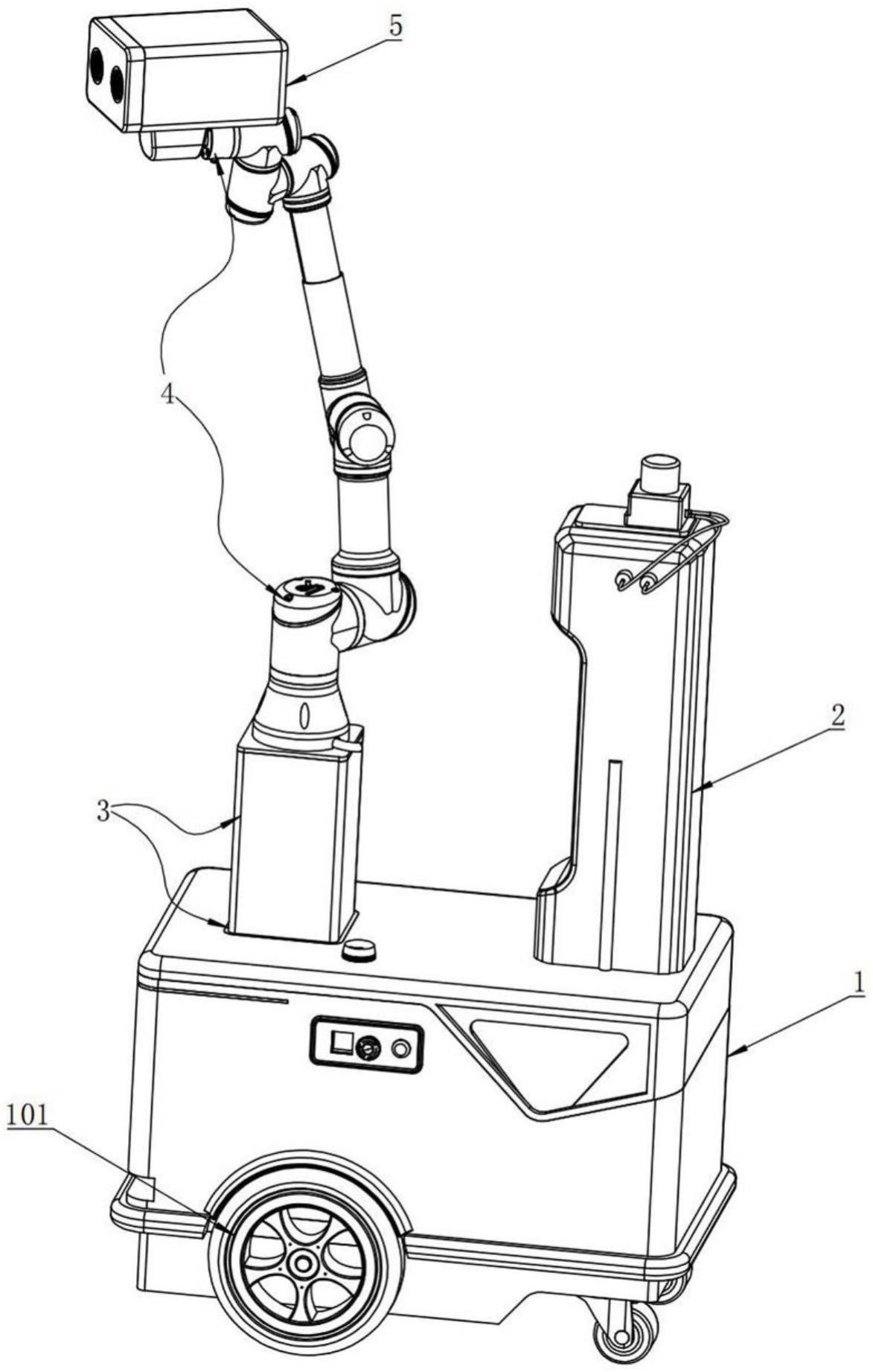
1、本实用新型所要解决的技术问题,是针对上述存在的技术不足,提供了一种多维度操控灵活型巡检机器人,包括机身、激光雷达、升降装置和机械臂,其中,升降装置包括支撑方管、第一伺服电机和伸缩方管,支撑方管竖直设置在机身上,伸缩方管下方滑动连接在支撑方管内部,第一伺服电机固定设置在支撑方管内部低端,用于驱动伸缩方管上下运动,机械臂固定设置在伸缩方管顶部,通过升降装置可将机械臂提升到一定基础高度,巡检高度范围较广,使用效果较好。
2、为解决上述技术问题,本实用新型所采用的技术方案是:一种多维度操控灵活型巡检机器人,其特征在于,包括:
3、机身,下方设置有驱动轮,用于驱动巡检机器人行走;
4、激光雷达,设置在机身顶部一侧,用于巡检机器人的导航;
5、升降装置,设置在机身上;
6、以及机械臂,设置在所述升降装置顶部;
7、其中,所述升降装置包括支撑方管、第一伺服电机和伸缩方管,所述支撑方管竖直设置在机身上,所述伸缩方管下方滑动连接在支撑方管内部,所述第一伺服电机固定设置在支撑方管内部底端,用于驱动伸缩方管上下运动。
8、进一步优化本技术方案,所述支撑方管固定设置在机身内部。
9、进一步优化本技术方案,所述支撑方管内部设置有第一丝杆,所述第一丝杆和第一伺服电机轴端通过联轴器连接,所述伸缩方管内部下方中部固定设置有第一丝套,所述第一丝套和第一丝杆配合。
10、进一步优化本技术方案,所述机械臂包括第一关节组和第二关节组,所述第一关节组底部设置在伸缩方管顶部,所述第二关节组设置在第一关节组上方,所述第一关节组和第二关节组之间设置有伸缩活节结构,所述第一关节组和第二关节组通过伸缩活节结构连接。
11、进一步优化本技术方案,所述伸缩活节结构包括主套管和伸缩套管,所述伸缩套管下方滑动连接在主套管上。
12、进一步优化本技术方案,所述主套管一侧下方垂直设置有连接管,连接管和第一关节组上方连接,所述伸缩套管顶部和第二关节组下方连接。
13、进一步优化本技术方案,所述主套管底部安装有第二伺服电机,用于驱动伸缩套管上下移动。
14、进一步优化本技术方案,所述主套管内部设置有第二丝杆,所述第二丝杆和第二伺服电机连接,所述伸缩套管内部下方设置有第二丝套,所述第二丝杆和第二丝套配合。
15、进一步优化本技术方案,所述主套管内部一侧设置有导向槽,所述伸缩套管一侧设置有导向块,所述导向块和导向槽相互配合。
16、进一步优化本技术方案,所述机械臂顶部设置有摄像头,该摄像头用于巡检时采集图像。
17、相对于现有技术,本实用新型具有以下有益效果:
18、1、通过升降装置可将机械臂提升到一定基础高度,巡检高度范围较广,使用效果较好。
19、2、支撑方管固定设置在机身内部,在伸缩方管收回时,机械臂的底部和机身上表面平齐,在此状态下的巡检机器人和现有带有机械臂的巡检机器人外观基本相同。
20、3、伸缩活节结构的设置,可将机械臂的中间活节进行调节加长,从而使得机械臂顶部的运动高度和活动范围增大,巡检范围较广。
21、4、改进后,巡检机器人的巡检高度范围提距离为:伸缩方管的伸长长度和伸缩套管的伸长长度之和。
22、5、第二伺服电机安装在主套管底部,并且第二伺服电机位于主套管外部,可通过外部线缆连接第二伺服电机,第二伺服电机安装和走线比较方便。
技术特征:
1.一种多维度操控灵活型巡检机器人,其特征在于,包括:
2.根据权利要求1所述的多维度操控灵活型巡检机器人,其特征在于,所述支撑方管固定设置在机身内部。
3.根据权利要求2所述的多维度操控灵活型巡检机器人,其特征在于,所述支撑方管内部设置有第一丝杆,所述第一丝杆和第一伺服电机轴端通过联轴器连接,所述伸缩方管内部下方中部固定设置有第一丝套,所述第一丝套和第一丝杆配合。
4.根据权利要求1所述的多维度操控灵活型巡检机器人,其特征在于,所述机械臂包括第一关节组和第二关节组,所述第一关节组底部设置在伸缩方管顶部,所述第二关节组设置在第一关节组上方,所述第一关节组和第二关节组之间设置有伸缩活节结构,所述第一关节组和第二关节组通过伸缩活节结构连接。
5.根据权利要求4所述的多维度操控灵活型巡检机器人,其特征在于,所述伸缩活节结构包括主套管和伸缩套管,所述伸缩套管下方滑动连接在主套管上。
6.根据权利要求5所述的多维度操控灵活型巡检机器人,其特征在于,所述主套管一侧下方垂直设置有连接管,连接管和第一关节组上方连接,所述伸缩套管顶部和第二关节组下方连接。
7.根据权利要求6所述的多维度操控灵活型巡检机器人,其特征在于,所述主套管底部安装有第二伺服电机,用于驱动伸缩套管上下移动。
8.根据权利要求7所述的多维度操控灵活型巡检机器人,其特征在于,所述主套管内部设置有第二丝杆,所述第二丝杆和第二伺服电机连接,所述伸缩套管内部下方设置有第二丝套,所述第二丝杆和第二丝套配合。
9.根据权利要求5所述的多维度操控灵活型巡检机器人,其特征在于,所述主套管内部一侧设置有导向槽,所述伸缩套管一侧设置有导向块,所述导向块和导向槽相互配合。
10.根据权利要求1-9任一项所述的多维度操控灵活型巡检机器人,其特征在于,所述机械臂顶部设置有摄像头。
技术总结
本技术涉及巡检机器人技术领域,尤其涉及一种多维度操控灵活型巡检机器人。包括机身、激光雷达、升降装置和机械臂,其中,升降装置包括支撑方管、第一伺服电机和伸缩方管,支撑方管竖直设置在机身上,伸缩方管下方滑动连接在支撑方管内部,第一伺服电机固定设置在支撑方管内部低端,用于驱动伸缩方管上下运动,机械臂固定设置在伸缩方管顶部,通过升降装置可将机械臂提升到一定基础高度,巡检高度范围较广,使用效果较好。
技术研发人员:李志鹏,雷苏雨,边泽楠
受保护的技术使用者:国能神华九江发电有限责任公司
技术研发日:20230112
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!