一种钢丝绳牵引自发电机器人的制作方法
本技术涉及轨道巡检类机器人,特别涉及一种钢丝绳牵引自发电机器人。
背景技术:
1、皮带是煤矿井下的重要运输手法,由于皮带运行的情况容易发生多种的问题,并且因为在煤矿井下环境危险,皮带发生的意外被无限的放大,造成非常严重的后果。目前的处理方法是用人时刻的盯着皮带运行,观察其运行状态,这种方法的误差性过大,人工观察的不确定性以及主观判断都有可能造成问题,不能及时发现皮带的异常状况。因此,选用机器人进行巡检,以有效的节省人力成本以及提高稳定性。
2、现有巡检方式中,多采用电池供电的机器人,在整体结构上,因为电池供电的机器人的驱动力源自自身,所以导致机器人的体积以及重量都很大,在此基础上充电问题不能得到充分的解决。因为目前没有井下充电的方式,所以电池的充电问题一直以来都是电池供电巡检机器人的技术难题,不能得到充分的解决。
技术实现思路
1、为了解决现有技术存在的问题,本实用新型提供了一种钢丝绳牵引自发电机器人,能够降低工人劳动强度,提高检测的准确度,并能够解决现有巷道内环境实时监控问题,解决目前存在的充电方式局限性过大的问题。
2、为了实现上述目的,本实用新型的技术方案是:
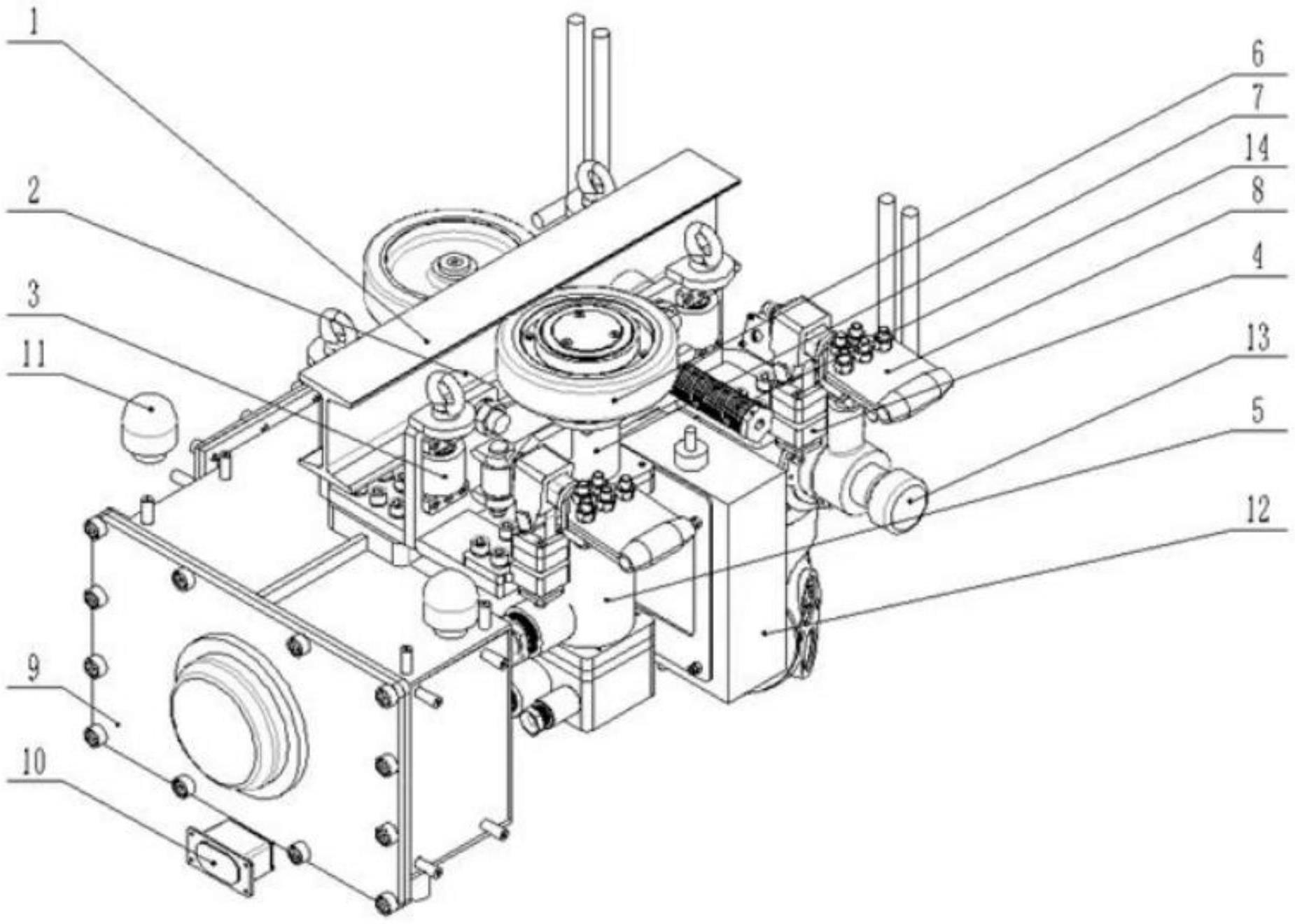
3、一种钢丝绳牵引自发电机器人,包括行走机构、发电机构、控制系统、报锁机构。所述行走机构包括轨道和行走轮组,所述发电机构包括发电轮、发电机,传动轴。所述发电轮位于轨道的两侧,沿着轨道行走。所述行走轮组包括四个行走轮,设置于轨道下沿的上方,分别位于发电轮的两侧。所述传动轴一端连接发电轮,另一端连接发电机,随着发电轮旋转,传动轴带动发电机,进行发电。
4、所述行走机构还包括辅助轮组,分别位于发电轮两侧;所述辅助轮组在轨道两侧进行导向,使机器人可以沿着轨道行走。
5、发电机构还包括涨紧弹簧,涨紧弹簧在轨道的两侧,与轨道和发电轮浮动连接,通过压紧发电轮,产生摩擦力,将动力传给传动轴,传动轴带动发电机,进行发电。
6、所述控制系统包括控制箱、避障传感器、报警灯、急停按钮、音响。控制箱前端连接避障传感器、后端连接急停按钮、上端连接报警灯,内侧连接音响。机器人运行过程中,避障传感器发现障碍后,报警灯进行报警,音响发出警告,机器人停止运行。调试过程中如果发生故障也可以按急停按钮停止运行。
7、所述报锁机构包括报锁器和调整座。调整座连接行走机构和报锁器,所述报锁器将外围设备提供的动力通过调整座传递给行走机构。
8、本实用新型的有益效果:
9、1.本实用新型提出的一种钢丝绳牵引自发电机器人,通过改变机器人的动力提供方式,以及电池的充电方式来解决巡检机器人的体积大、重量大等弊端,以及目前无法解决的井下的充电方式。
10、2.本实用新型具备通讯功能、远程监控功能、语音自动报警功能、危险气体检测功能、温度异常报警功能、烟雾浓度报警功能、自动避障功能。
11、3.本实用新型用于矿下皮带巡检,能够降低工人劳动强度,提高检测的准确度,减少井下危险事故的发生,提高工作效率。
技术特征:
1.一种钢丝绳牵引自发电机器人,其特征在于:包括行走机构、发电机构、控制系统、报锁机构;所述行走机构包括轨道和行走轮组,所述发电机构包括发电轮、发电机,传动轴;所述发电轮位于轨道的两侧,沿着轨道行走;所述行走轮组包括四个行走轮,设置于轨道下沿的上方,分别位于发电轮的两侧;所述传动轴一端连接发电轮,另一端连接发电机,随着发电轮旋转,传动轴带动发电机,进行发电。
2.根据权利要求1所述的一种钢丝绳牵引自发电机器人,其特征在于:所述行走机构还包括辅助轮组,分别位于发电轮两侧;所述辅助轮组在轨道两侧进行导向,使机器人可以沿着轨道行走。
3.根据权利要求1所述的一种钢丝绳牵引自发电机器人,其特征在于:发电机构还包括涨紧弹簧,涨紧弹簧在轨道的两侧,与轨道和发电轮浮动连接,通过压紧发电轮,产生摩擦力。
4.根据权利要求1所述的一种钢丝绳牵引自发电机器人,其特征在于:所述控制系统包括控制箱、避障传感器、报警灯、急停按钮、音响;控制箱前端连接避障传感器、后端连接急停按钮、上端连接报警灯,内侧连接音响。
5.根据权利要求1所述的一种钢丝绳牵引自发电机器人,其特征在于:所述报锁机构包括报锁器和调整座;调整座连接行走机构和报锁器,所述报锁器将外围设备提供的动力通过调整座传递给行走机构。
技术总结
本技术公开了一种钢丝绳牵引自发电机器人。包括行走机构、发电机构、控制系统、报锁机构。行走机构包括轨道和行走轮组,发电机构包括发电轮、发电机,传动轴。发电轮位于轨道的两侧,沿着轨道行走。行走轮组包括四个行走轮,设置于轨道下沿的上方,分别位于发电轮的两侧。行走机构还包括辅助轮组,分别位于发电轮两侧;辅助轮组在轨道两侧进行导向,使机器人可以沿着轨道行走。传动轴一端连接发电轮,另一端连接发电机,随着发电轮旋转,传动轴带动发电机,进行发电。本技术通过改变机器人的动力提供方式,以及电池的充电方式来解决巡检机器人的体积大、重量大等弊端,以及目前无法解决的井下的充电方式。
技术研发人员:关伟,张贤国,仝勇,曹克,马金亮,袁中杰,李赫,白鹤,姜军,邱教伟,鲍东旭,李驰
受保护的技术使用者:乌审旗蒙大矿业有限责任公司
技术研发日:20230203
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!