一种机器人自动上料柔性抓手的制作方法
本技术涉及抓手,具体为一种机器人自动上料柔性抓手。
背景技术:
1、机器人在使用时,通过上的抓手对工件进行夹紧,之后机械人的机械臂将抓紧的工件放置在指定的上料位置,从而实现对工件的自动上料,通常该上料的方式简单,解决了人工的劳动力短缺的问题。
2、这种现有技术方案在使用时还存在以下问题:通常抓手直接将工件进行夹紧,抓手其质地较硬,如抓取的力度过大的话,会导致工件出现挤压损坏的情况,导致机器人上料的工件损坏的情况,因此通常需要在机器人夹紧工件时根据工件的尺寸和受力调整抓手夹紧的力度,保证工件不会损坏,但是频繁的更换工件的种类,较为繁琐。
3、所以需要针对上述问题进行改进,来满足市场需求。
技术实现思路
1、本实用新型的目的在于提供一种机器人自动上料柔性抓手,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人自动上料柔性抓手,包括气动夹手,所述气动夹手的一端开设有导轨,所述导轨的内部嵌套有两组夹头,所述夹头的一侧设置有安装块,所述安装块的一端固定连接有抓手。
3、优选的,所述抓手的一侧活动连接有转轴,所述转轴的表面活动贯穿连接有夹轮。
4、优选的,所述抓手的表面开设有凹槽,所述夹轮滚动设置在凹槽的内部。
5、优选的,所述夹头和安装块上皆开设有安装孔,所述夹头和安装块上的安装孔相互对应。
6、优选的,所述夹头和安装块的内部贯穿连接有安装栓,所述安装栓穿过所述安装块内部安装孔与所述夹头上的安装孔相螺纹连接。
7、与现有技术相比,本实用新型的有益效果是:该机器人自动上料柔性抓手,通过气动夹手、导轨和夹头之间的相互配合,构成了气动平行夹爪的基本组件,之后通过安装块、安装孔和安装栓之间的相互配合,使得安装块和夹头相互安装在一起,之后通过抓手、转轴和夹轮之间的相互配合,可通过夹轮将工件夹紧定位,通过夹轮的滚动可对工件进行柔性夹持,保持夹紧工件的同时,不会因为夹紧力度过大导致工件变形损坏,方便机器人的自动上料。
技术特征:
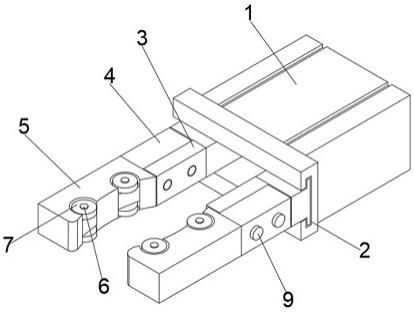
1.一种机器人自动上料柔性抓手,包括气动夹手(1),其特征在于:所述气动夹手(1)的一端开设有导轨(2),所述导轨(2)的内部嵌套有两组夹头(3),所述夹头(3)的一侧设置有安装块(4),所述安装块(4)的一端固定连接有抓手(5)。
2.根据权利要求1所述的一种机器人自动上料柔性抓手,其特征在于:所述抓手(5)的一侧活动连接有转轴(6),所述转轴(6)的表面活动贯穿连接有夹轮(7)。
3.根据权利要求2所述的一种机器人自动上料柔性抓手,其特征在于:所述抓手(5)的表面开设有凹槽,所述夹轮(7)滚动设置在凹槽的内部。
4.根据权利要求3所述的一种机器人自动上料柔性抓手,其特征在于:所述夹头(3)和安装块(4)上皆开设有安装孔(8),所述夹头(3)和安装块(4)上的安装孔相互对应。
5.根据权利要求4所述的一种机器人自动上料柔性抓手,其特征在于:所述夹头(3)和安装块(4)的内部贯穿连接有安装栓(9),所述安装栓(9)穿过所述安装块(4)内部安装孔(8)与所述夹头(3)上的安装孔(8)相螺纹连接。
技术总结
本技术公开了一种机器人自动上料柔性抓手,包括气动夹手,所述气动夹手的一端开设有导轨,所述导轨的内部嵌套有两组夹头,所述夹头的一侧设置有安装块,所述安装块的一端固定连接有抓手。该机器人自动上料柔性抓手,通过气动夹手、导轨和夹头之间的相互配合,构成了气动平行夹爪的基本组件,之后通过安装块、安装孔和安装栓之间的相互配合,使得安装块和夹头相互安装在一起,之后通过抓手、转轴和夹轮之间的相互配合,可通过夹轮将工件夹紧定位,通过夹轮的滚动可对工件进行柔性夹持,保持夹紧工件的同时,不会因为夹紧力度过大导致工件变形损坏,方便机器人的自动上料。
技术研发人员:焦宝平,韩静瑶,何华伟
受保护的技术使用者:新乡市摩耐特活塞有限公司
技术研发日:20230114
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!