限位装置、机器人关节及机器人的制作方法
本申请涉及机器人,特别涉及一种限位装置、机器人关节及机器人。
背景技术:
1、工业机器人关节的一个重要参数为工作空间,工作空间的范围是由机器人关节的各关节转角的最大转角耦合而成的,其中各关节的最大转角通常由两种方式限定,一种是由程序控制的软限位,另一种是由止挡块等形式控制的硬限位。一般而言,硬限位的限位角度大于等于软限位的限位角度,因为设置硬限位的目的主要是为了防止机器人关节在失控或其他意外因素而导致过分运动无法停止的情况的发生。
2、但硬限位普遍存在一些共性问题,硬限位结构大多数采用硬碰硬结构,发生碰撞后无法最大化的保护关节减速器,碰撞均为切向碰撞,未能够将碰撞发生时产生的冲击进行适当减弱或者分流等等。
技术实现思路
1、本申请提供一种限位装置,本申请还提供一种具有上述限位装置的机器人关节以及机器人。
2、第一方面,本申请提供一种限位装置,应用于机器人关节,机器人关节包括第一关节主体以及可转动地连接于第一关节主体的第二关节主体,第二关节主体在预定角度范围内相对于第一关节主体转动。限位装置包括碰撞件、限位件以及缓冲件,碰撞件用于设置于第二关节主体。限位件用于可活动地设置于第一关节主体,限位件设有撞击面。缓冲件用于设置于限位件和第一关节主体之间。第二关节主体相对于第一关节主体转动的角度超出预定角度范围后,碰撞件撞击限位件的撞击面;碰撞件通过撞击面驱使限位件沿指定方向相对于第一关节主体移动,指定方向与碰撞件对撞击面的撞击方向不同。
3、在一些可选示例中,限位装置还包括安装盒,安装盒包括盒体和盖体,盒体具有相对的第一侧壁和第二侧壁,第一侧壁用于连接于第一关节主体,盖体连接于盒体且位于第一侧壁和第二侧壁之间,限位件可活动地设置于盒体。
4、在一些可选示例中,第二侧壁设有让位口,限位件包括限位座和限位块,限位座可活动地设置于盒体内,限位块连接于限位座的一侧且通过让位口暴露于盒体外,撞击面设置于限位块。
5、在一些可选示例中,撞击面包括圆弧面,限位块的侧壁凹陷形成圆弧面,圆弧面的圆心位于限位块外。
6、在一些可选示例中,撞击面的数量设置有两个,两个撞击面分别位于限位件的相背两侧,且关于限位件的中线对称。
7、在一些可选示例中,撞击面还包括过渡面,过渡面位于圆弧面靠近第一关节主体的一端且与圆弧面相切,过渡面的圆心位于限位块内。
8、在一些可选示例中,限位座的两侧分别抵持于盒体的相对两内壁;盒体的内壁设有限位台阶,限位台阶与第二侧壁相对间隔设置,限位座可活动地设置于第二侧壁和限位台阶之间。
9、在一些可选示例中,限位座靠近第一侧壁的一侧设有限位槽,缓冲件的一侧嵌入限位槽,另一侧抵持于第一侧壁。
10、在一些可选示例中,盒体具有开口,开口位于第一侧壁和第二侧壁之间,开口与让位口连通,盖体覆盖开口。
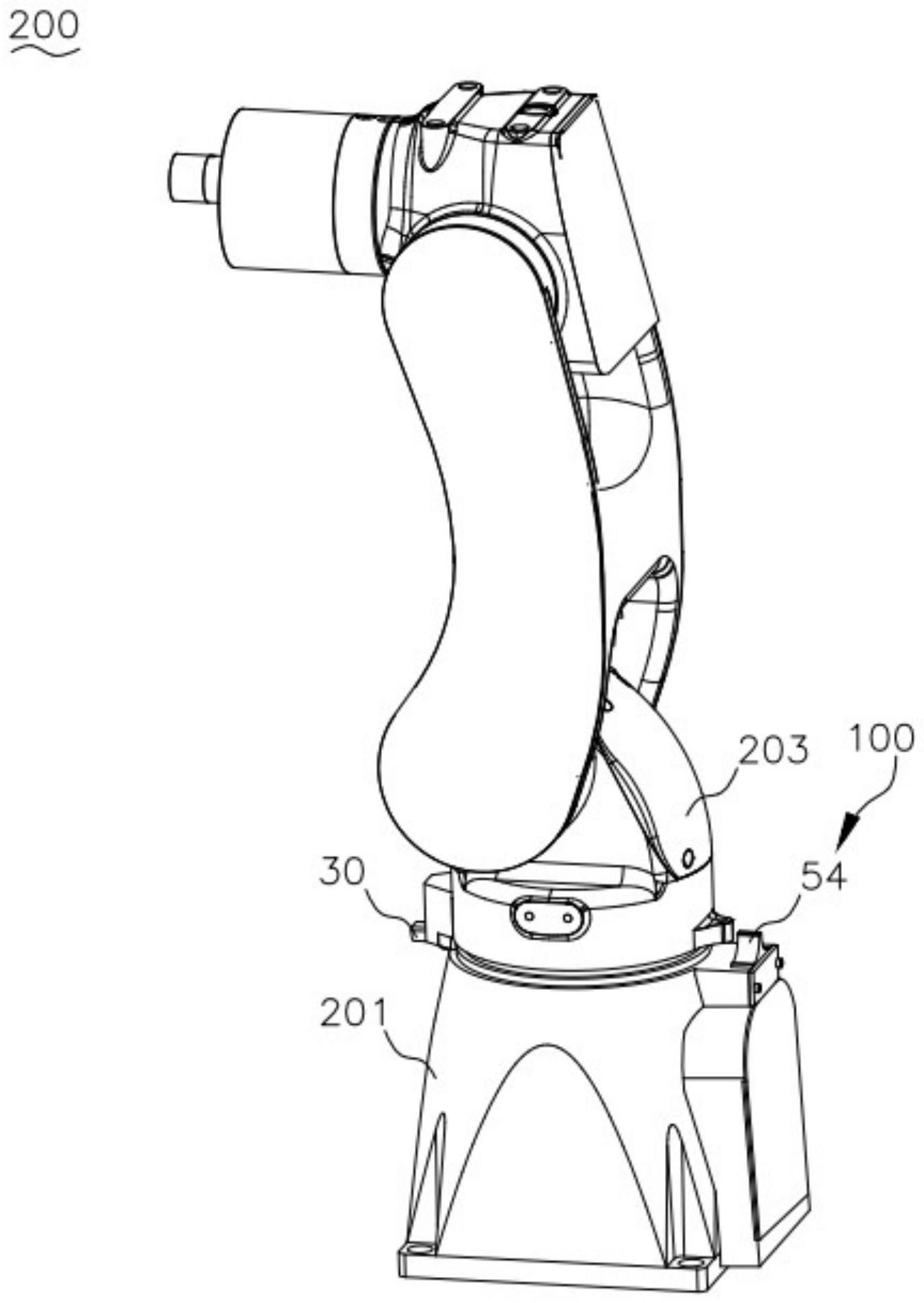
11、第二方面,本申请还提供一种机器人关节,包括第一关节主体、第二关节主体以及上述的限位装置,第二关节主体可转动地连接于第一关节主体,限位装置的限位件设置于第一关节主体,碰撞件设置于第二关节主体。
12、第三方面,本申请还提供一种机器人,包括机体以及上述的机器人关节,机器人关节连接于机体。
13、相对于现有技术,本申请提供的限位装置应用于机器人关节时,当机器人关节发生失效时,第二关节主体相对于第一关节主体转动超出预定角度范围。第二关节主体带动碰撞件转动,直至碰撞件撞击在限位块的撞击面上。限位件受到撞击后相对于第一关节主体沿指定方向移动,指定方向与碰撞件的撞击方向不同,将碰撞发生时产生的冲击进行分流,减小了对机器人关节的机械结构造成的损伤。
技术特征:
1.一种限位装置,其特征在于,应用于机器人关节,所述机器人关节包括第一关节主体以及可转动地连接于所述第一关节主体的第二关节主体,所述第二关节主体在预定角度范围内相对于所述第一关节主体转动,所述限位装置包括:
2.如权利要求1所述的限位装置,其特征在于,所述限位装置还包括安装盒,所述安装盒包括盒体和盖体,所述盒体具有相对的第一侧壁和第二侧壁,所述第一侧壁用于连接于所述第一关节主体,所述盖体连接于所述盒体且位于所述第一侧壁和所述第二侧壁之间,所述限位件可活动地设置于所述盒体。
3.如权利要求2所述的限位装置,其特征在于,所述第二侧壁设有让位口,所述限位件包括限位座和限位块,所述限位座可活动地设置于所述盒体内,所述限位块连接于所述限位座的一侧且通过所述让位口暴露于所述盒体外,所述撞击面设置于所述限位块。
4.如权利要求3所述的限位装置,其特征在于,所述撞击面包括圆弧面,所述限位块的侧壁凹陷形成所述圆弧面,所述圆弧面的圆心位于所述限位块外。
5.如权利要求4所述的限位装置,其特征在于,所述撞击面的数量设置有两个,两个所述撞击面分别位于所述限位件的相背两侧,且关于所述限位件的中线对称。
6.如权利要求4所述的限位装置,其特征在于,所述撞击面还包括过渡面,所述过渡面位于所述圆弧面靠近所述第一关节主体的一端且与所述圆弧面相切,所述过渡面的圆心位于所述限位块内。
7.如权利要求3所述的限位装置,其特征在于,所述限位座的两侧分别抵持于所述盒体的相对两内壁;所述盒体的内壁设有限位台阶,所述限位台阶与所述第二侧壁相对间隔设置,所述限位座可活动地设置于所述第二侧壁和所述限位台阶之间。
8.如权利要求3所述的限位装置,其特征在于,所述限位座靠近所述第一侧壁的一侧设有限位槽,所述缓冲件的一侧嵌入所述限位槽,另一侧抵持于所述第一侧壁。
9.如权利要求3所述的限位装置,其特征在于,所述盒体具有开口,所述开口位于所述第一侧壁和所述第二侧壁之间,所述开口与所述让位口连通,所述盖体覆盖所述开口。
10.一种机器人关节,其特征在于,包括:
11.一种机器人,其特征在于,包括:
技术总结
本申请涉及机器人关节技术领域,特别涉及一种限位装置、机器人关节及机器人。机器人关节包括第一关节主体以及可转动地连接于第一关节主体的第二关节主体,第二关节主体在预定角度范围内相对于第一关节主体转动。限位装置包括碰撞件、限位件以及缓冲件,碰撞件用于设置于第二关节主体。限位件用于可活动地设置于第一关节主体,限位件设有撞击面。缓冲件用于设置于限位件和第一关节主体之间。第二关节主体相对于第一关节主体转动的角度超出预定角度范围后,碰撞件撞击限位件的撞击面;碰撞件通过撞击面驱使限位件沿指定方向相对于第一关节主体移动,指定方向与碰撞件对撞击面的撞击方向不同。上述限位装置减小了对机器人关节造成的损伤。
技术研发人员:徐文才
受保护的技术使用者:库卡机器人制造(上海)有限公司
技术研发日:20230112
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!