一种镜片自动化生产机械手的制作方法
本技术涉及镜片生产,具体涉及一种镜片自动化生产机械手。
背景技术:
1、眼镜片是眼镜最为重要的一个部件,它的好坏直接关系到使用者使用是否舒适,镜片的种类非常多,材质也非常多样,我们根据眼镜不同的功能选择不一样的镜片。为了能够实现不同的功能,在生产的过程中需要在镜片基材上贴合不同类型的薄膜;为了实现镜片制造的自动化,目前大多采用机械手进行取料,而由于镜片基材在模具中取出大多是多个连接在一起,故镜片基材的取料以及薄膜的取料需要用到两个机械手,占地空间较大的同时使得成本增加。
技术实现思路
1、本实用新型的目的是针对现有技术中的上述不足,提供了一种镜片自动化生产机械手,节约成本。
2、本实用新型的目的通过以下技术方案实现:一种镜片自动化生产机械手,包括底座、机械臂以及治具;所述机械臂设于底座;所述治具与机械臂连接;
3、所述治具包括底板;所述底板的一端设有第一取料组件;所述底板的另一端设有第二取料组件;
4、所述第一取料组件包括第一取料板、夹持件、夹持驱动件以及第一吸附件;所述第一取料板设于底板的一端;所述夹持件活动设于第一取料板;所述夹持驱动件用于驱动夹持件在第一取料板上活动;所述第一吸附件设于第一取料板;
5、所述第二取料组件包括吸附驱动件、第二取料板以及第二吸附件;所述吸附驱动件设于底板的另一端;所述吸附驱动件用于驱动第二取料板在底板的另一端活动;所述第二吸附件设于第二取料板。
6、本实用新型进一步设置为,所述夹持件包括相对设置的左夹持件以及右夹持件;所述夹持驱动件包括用于驱动左夹持件移动的左夹持驱动件以及用于右夹持件移动的右夹持驱动件;所述左夹持件与右夹持件相对移动。
7、本实用新型进一步设置为,所述左夹持件靠近右夹持件的一侧设有左让位槽;所述右夹持件靠近左夹持件的一侧设有右让位槽。
8、本实用新型进一步设置为,所述第一吸附件为真空吸嘴;所述第一吸附件设于左夹持件与右夹持件之间。
9、本实用新型进一步设置为,所述第一取料组件还包括设于第一取料板的光传感器。
10、本实用新型进一步设置为,所述吸附驱动件以及夹持驱动件均为气缸。
11、本实用新型进一步设置为,所述第二取料板包括对称设于底板两侧的第二左取料板以及第二右取料板;所述吸附驱动件包括用于驱动第二左取料板移动的左吸附驱动件以及用于第二右取料板移动的右吸附驱动件;所述第二左取料板与第二右取料板同向移动。
12、本实用新型进一步设置为,所述第二左取料板以及第二右取料板均等间距设有多个第二吸附件;所述第二吸附件为真空吸嘴。
13、本实用新型进一步设置为,所述机械臂的端部设有旋转电机;所述旋转电机的输出端与底板连接。
14、本实用新型的有益效果:本实用新型通过在底板上同时设置第一取料组件以及第二取料组件,分别对镜片以及薄膜进行取料,从而将两种取料组件集成在一台机械手上,能够有效地节省空间以及成本;另外第一取料组件以及第二取料组件分别设于底板的两端,能够有效地防止两个取料组件相互干扰。
技术特征:
1.一种镜片自动化生产机械手,其特征在于:包括底座(1)、机械臂(2)以及治具;所述机械臂(2)设于底座(1);所述治具与机械臂(2)连接;
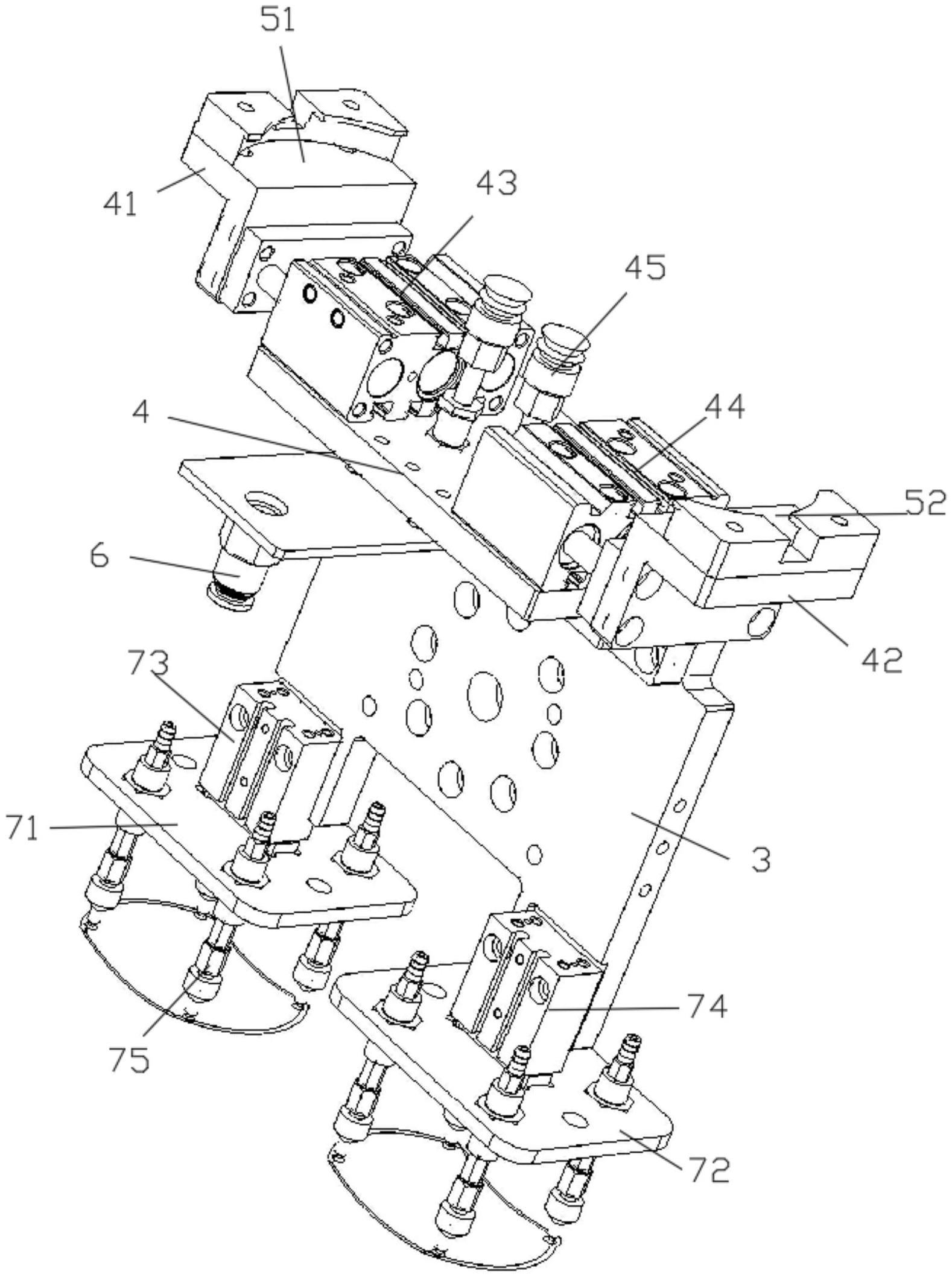
2.根据权利要求1所述的一种镜片自动化生产机械手,其特征在于:所述夹持件包括相对设置的左夹持件(41)以及右夹持件(42);所述夹持驱动件包括用于驱动左夹持件(41)移动的左夹持驱动件(43)以及用于右夹持件(42)移动的右夹持驱动件(44);所述左夹持件(41)与右夹持件(42)相对移动。
3.根据权利要求2所述的一种镜片自动化生产机械手,其特征在于:所述左夹持件(41)靠近右夹持件(42)的一侧设有左让位槽(51);所述右夹持件(42)靠近左夹持件(41)的一侧设有右让位槽(52)。
4.根据权利要求2所述的一种镜片自动化生产机械手,其特征在于:所述第一吸附件(45)为真空吸嘴;所述第一吸附件(45)设于左夹持件(41)与右夹持件(42)之间。
5.根据权利要求1所述的一种镜片自动化生产机械手,其特征在于:所述第一取料组件还包括设于第一取料板(4)的光传感器(6)。
6.根据权利要求2所述的一种镜片自动化生产机械手,其特征在于:所述吸附驱动件以及夹持驱动件均为气缸。
7.根据权利要求1所述的一种镜片自动化生产机械手,其特征在于:所述第二取料板包括对称设于底板(3)两侧的第二左取料板(71)以及第二右取料板(72);所述吸附驱动件包括用于驱动第二左取料板(71)移动的左吸附驱动件(73)以及用于第二右取料板(72)移动的右吸附驱动件(74);所述第二左取料板(71)与第二右取料板(72)同向移动。
8.根据权利要求7所述的一种镜片自动化生产机械手,其特征在于:所述第二左取料板(71)以及第二右取料板(72)均等间距设有多个第二吸附件(75);所述第二吸附件(75)为真空吸嘴。
9.根据权利要求1所述的一种镜片自动化生产机械手,其特征在于:所述机械臂(2)的端部设有旋转电机(8);所述旋转电机(8)的输出端与底板(3)连接。
技术总结
本技术涉及镜片生产技术领域,具体涉及一种镜片自动化生产机械手,包括底座、机械臂以及治具;所述机械臂设于底座;所述治具与机械臂连接;所述治具包括底板;所述底板的一端设有第一取料组件;所述底板的另一端设有第二取料组件。本技术通过在底板上同时设置第一取料组件以及第二取料组件,分别对镜片以及薄膜进行取料,从而将两种取料组件集成在一台机械手上,能够有效地节省空间以及成本;另外第一取料组件以及第二取料组件分别设于底板的两端,能够有效地防止两个取料组件相互干扰。
技术研发人员:谢国强
受保护的技术使用者:东莞粤恒光学有限公司
技术研发日:20230207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!