一种电力管道疏通窥探机器人的制作方法
本技术涉及管道疏通领域,特别是一种电力管道疏通窥探机器人。
背景技术:
1、由于城市用地紧张,交通压力大,市容建设等原因,大城市普遍采用地下电缆输电方式。相对于架空线,电缆具有占地小、输电可靠、抗干扰能力强等优点,但不同于高架高压线路,电缆常铺设于电缆沟、隧道、管道或室内,随着城市地下电缆的普遍推广,地下管廊的铺设也越来越多,由于电缆管基本都是在设计初期预埋地下,待有需要时再敷设电缆,但地下电力管道埋于地下时间较长,管道过多,作业时未能准确判定管道的路径走向且不易勘测,而且因管道狭窄有堵塞的可能,由于电缆管预埋时间较长有时由于其他工程开挖施工作业处理不慎会导致电缆管破裂堵塞,因此在电缆敷设前需确认预埋的电缆管是否有堵塞,电缆是否可以顺利穿过,而电缆管直径一般较小,只能依靠小型机器人进行探测。
2、现有的管道疏通窥探机器人通过摄像装置可以窥探电力管道的内部情况,对于管道内的普通淤泥,也能够进行清淤处理。但是,对于顽固堵塞,现有的管道疏通窥探机器人难以进行疏通,往往需要开挖施工。目前的操作是管道疏通窥探机器人退出后,工作人员通过排查等手段确定电力管道顽固堵塞的位置后,再进行开挖作业,工序冗杂,施工进度慢。
技术实现思路
1、本实用新型的目的在于:针对现有技术存在的问题,提供一种电力管道疏通窥探机器人,通过设置探棒实现在地面对地下的机器人进行准确定位,从而准确定位堵塞位置,为后期开挖提供依据,节省排查时间。
2、为了实现上述目的,本实用新型采用的技术方案为:
3、一种电力管道疏通窥探机器人,包括壳体,所述壳体安装有走行组件、疏通组件和摄像组件,所述壳体内安装有探棒,所述探棒能够进行gps定位,所述壳体尾部连接有收放尺,所述收放尺设置有刻度。
4、本实用新型通过摄像组件可以直接观察电力管道内部结构,能够提前摸清顽固堵塞的具体情况,便于后期开挖,避免放电缆一般才发现管道堵塞,影响工期;通过疏通组件能够在不破坏原有电力管道的前提下疏通普通堵塞,节省邀请专业队伍进行疏通管道的费用开支;对于顽固堵塞,通过探棒能够准确定位堵塞位置,为后期开挖提供依据,节省排查时间,有效的降低维护成本和避免资源浪费;进一步地,通过设置收放尺,能够计算机器人前进距离,辅助确定堵塞位置,并可用于回收机器人。
5、作为本实用新型的优选方案,所述探棒内设置有定位芯片,能够实时反馈机器人的运动轨迹,便于准确确定堵塞位置。
6、作为本实用新型的优选方案,所述疏通窥探机器人还包括处理显示装置,所述处理显示装置能够接收所述摄像组件和所述探棒的信号,实时显示管道的内部画面和位置,便于在地面遥控地下机器人。
7、作为本实用新型的优选方案,所述信号通过无线传输,减轻机器人负重。
8、作为本实用新型的优选方案,所述壳体的尾部还设置有天线,所述天线和所述处理显示装置通信连接。
9、作为本实用新型的优选方案,所述处理显示装置包括手机、电脑等。
10、作为本实用新型的优选方案,所述收放尺为皮尺。
11、作为本实用新型的优选方案,所述疏通窥探机器人还包括照明组件,所述照明组件和所述摄像组件均位于所述壳体的前端。所述照明组件用于为所述摄像组件提供照明。
12、作为本实用新型的优选方案,所述疏通组件为电动钻头或水枪等。
13、作为本实用新型的优选方案,所述走行组件为履带或走行轮等。
14、综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
15、本实用新型通过摄像组件可以直接观察电力管道内部结构,能够提前摸清顽固堵塞的具体情况,便于后期开挖,避免放电缆一般才发现管道堵塞,影响工期;通过疏通组件能够在不破坏原有电力管道的前提下疏通普通堵塞,节省邀请专业队伍进行疏通管道的费用开支;对于顽固堵塞,通过探棒能够准确定位堵塞位置,为后期开挖提供依据,节省排查时间,有效的降低维护成本和避免资源浪费;进一步地,通过设置收放尺,能够计算机器人前进距离,辅助确定堵塞位置,并可用于回收机器人。
技术特征:
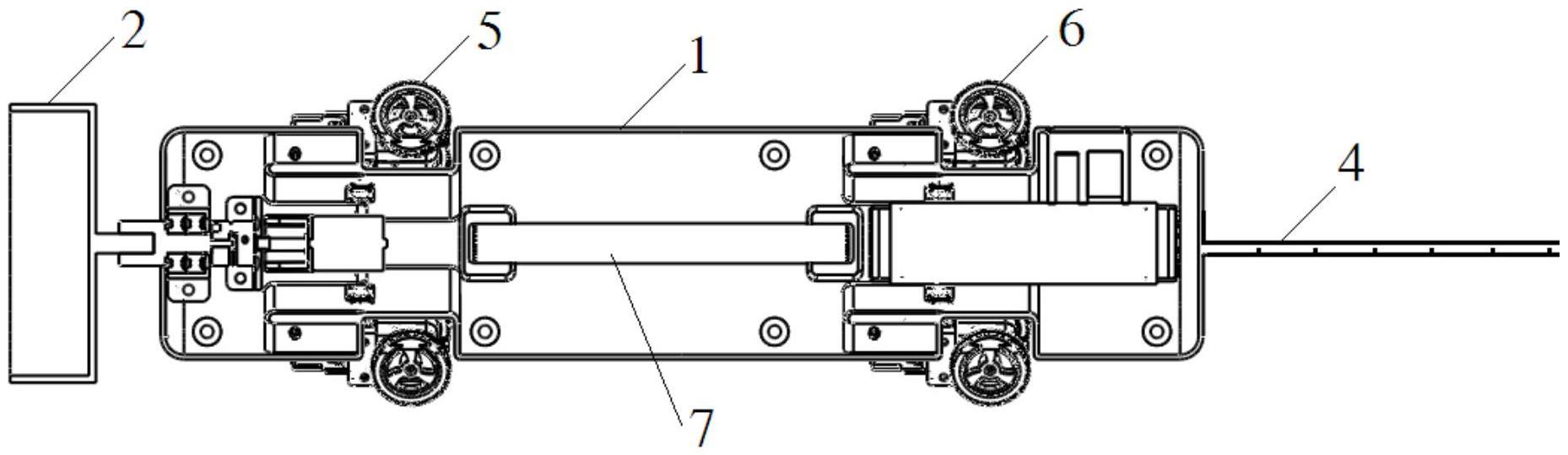
1.一种电力管道疏通窥探机器人,包括壳体(1),所述壳体(1)安装有走行组件、疏通组件(2)和摄像组件(3),其特征在于,所述壳体(1)内安装有探棒(7),所述探棒(7)能够进行gps定位,所述壳体(1)尾部连接有收放尺(4),所述收放尺(4)设置有刻度。
2.根据权利要求1所述的一种电力管道疏通窥探机器人,其特征在于,所述探棒(7)内设置有定位芯片。
3.根据权利要求1所述的一种电力管道疏通窥探机器人,其特征在于,还包括处理显示装置,所述处理显示装置能够接收所述摄像组件(3)和所述探棒(7)的信号,实时显示管道的内部画面和位置。
4.根据权利要求3所述的一种电力管道疏通窥探机器人,其特征在于,所述信号通过无线传输。
5.根据权利要求4所述的一种电力管道疏通窥探机器人,其特征在于,所述壳体(1)的尾部还设置有天线,所述天线和所述处理显示装置通信连接。
6.根据权利要求5所述的一种电力管道疏通窥探机器人,其特征在于,所述处理显示装置包括手机、电脑。
7.根据权利要求1所述的一种电力管道疏通窥探机器人,其特征在于,所述收放尺(4)为皮尺。
8.根据权利要求1-7任一所述的一种电力管道疏通窥探机器人,其特征在于,还包括照明组件,所述照明组件和所述摄像组件(3)均位于所述壳体(1)的前端。
9.根据权利要求8所述的一种电力管道疏通窥探机器人,其特征在于,所述疏通组件(2)为电动钻头或水枪。
10.根据权利要求9所述的一种电力管道疏通窥探机器人,其特征在于,所述走行组件为履带或走行轮。
技术总结
本技术公开了一种电力管道疏通窥探机器人,包括壳体,壳体安装有走行组件、疏通组件和摄像组件,壳体内安装有探棒,探棒能够进行GPS定位,壳体尾部连接有收放尺,收放尺设置有刻度。本技术通过摄像组件可以直接观察电力管道内部结构,能够提前摸清顽固堵塞的具体情况,便于后期开挖,避免放电缆一般才发现管道堵塞,影响工期;通过疏通组件能够在不破坏原有电力管道的前提下疏通普通堵塞,节省邀请专业队伍进行疏通管道的费用开支;对于顽固堵塞,通过探棒能够准确定位堵塞位置,为后期开挖提供依据,节省排查时间,有效的降低维护成本和避免资源浪费;通过设置收放尺,能够计算机器人前进距离,辅助确定堵塞位置,并可用于回收机器人。
技术研发人员:刁宇龙,徐立成,陈桄耀,马帅飞,董奇光,杨嘉辉,朱文滔,吉开泉,徐龙彬,梁瑞煜,吴亚玲,陈建华,邓林冲,成冠桥,陈国柱
受保护的技术使用者:刁宇龙
技术研发日:20230203
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!