一种用于电池检测的工业机器人的制作方法
本技术涉及机器人检测设备,尤其涉及一种用于电池检测的工业机器人。
背景技术:
1、电池指盛有电解质溶液和金属电极以产生电流的杯、槽或其他容器或复合容器的部分空间,能将化学能转化成电能的装置。具有正极、负极之分。随着科技的进步,电池泛指能产生电能的小型装置。
2、电池在生产过程中,需要对其进行质量检测,现有检测手段一般是使用工业机器人将生产线上的电池夹持起来,再将电池搬运到电池检测仪上进行检测,但现有的工业机器人在夹持电池后,电池容易从夹臂上滑落,造成电池的损坏,对此我们提出了一种用于电池检测的工业机器人来解决上述问题。
3、公开号为cn 217943387 u的专利公开了一种用于电池检测的工业机器人,包括机器人,所述机器人包括履带行动系统、机械臂系统和夹持系统,所述夹持系统上固定有电动伸缩杆,所述电动伸缩杆的底端设置有拆装吸盘组件;所述拆装吸盘组件中包括套设在电动伸缩杆底端的杆套,所述杆套的底端固定有吸盘,所述电动伸缩杆的外表面固定有连接杆,所述杆套的外表面贯穿开设有u型槽,本实用新型涉及电池检测技术领域。该用于电池检测的工业机器人,通过拆装吸盘组件的设置,实现了对吸盘的快速拆装更换,提升了拆装效率,通过吸盘与电动伸缩杆的配合使用,实现了对电池的快速吸附,避免了机器人在夹持电池后,电池从夹臂上滑落,实用性很强。
4、但该装置通过电动伸缩杆驱动两个夹持臂对电池进行夹持,容易因力度过大导致对电池造成夹伤,并且在取下电池时,电池表面与两个顶杆进行接触挤压也容易对电池造成刮伤。
技术实现思路
1、本实用新型的目的在于提供一种用于电池检测的工业机器人,以解决上述背景技术中提出的问题。
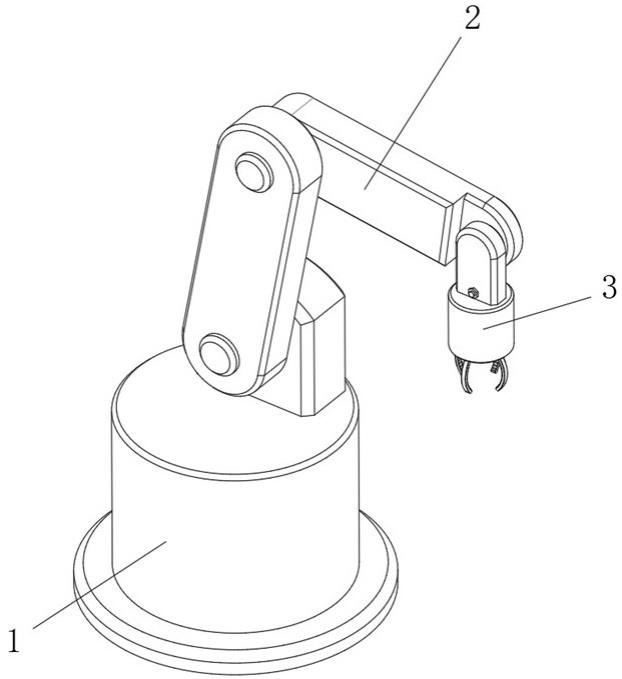
2、为实现上述目的,本实用新型提供如下技术方案:一种用于电池检测的工业机器人,包括工业机器人主体,所述工业机器人主体上安装有机械臂组件,机械臂组件上安装有夹持装置,夹持装置内开设有空腔,空腔内布置有伺服电机,伺服电机的输出轴上安装有转动盘,转动盘上开设有若干沿圆周方向均匀分布的弧形滑槽,弧形滑槽内滑动安装有t形连接轴,所述空腔的底部内壁上沿圆周方向均匀开设有矩形滑槽,t形连接轴滑动安装在矩形滑槽内,所述t形连接轴延伸出矩形滑槽的一端安装有夹爪。
3、优选的,所述夹爪呈弧形,四个夹爪相互靠近的一侧均沿边缘均匀布置有若干防滑橡胶条。
4、优选的,所述弧形滑槽的横截面呈t形,与t形连接轴相适配。
5、优选的,所述夹持装置的底部中心位置布置有检测探头。
6、优选的,所述机械臂组件与夹持装置的连接处开设有插接槽,夹持装置上安装有与插接槽相适配的插接块。
7、优选的,所述机械臂组件与插接块上均开设有相适配的插孔,插接块插入至插接槽内时,插接块上的插孔与机械臂组件上的插孔相互对齐。
8、优选的,所述插接块插入至插接槽内后,对齐的插孔内可插入固定螺栓,固定螺栓上螺纹连接有螺帽,固定螺栓的一端抵紧在机械臂组件的一侧,螺纹连接在固定螺栓上的螺帽抵紧在机械臂组件的另一侧。
9、本实用新型的有益效果是:
10、本实用新型中,通过布置有的伺服电机、转动盘和夹爪等结构的相互配合,从而可在需要对电池进行夹持时,通过伺服电机带动转动盘转动,从而可通过转动盘上的弧形滑槽与t形连接轴进行相互配合,进而可使得四个被矩形滑槽限制移动方向的t形连接轴沿着弧形滑槽滑动的同时沿着矩形滑槽相互靠近或相互远离,从而实现对电池进行夹持的目的,并且通过四个夹爪上布置有的防滑橡胶条可进一步的提高夹爪的防滑性,避免电池在夹持过程中脱落,需要松开电池时仅需通过伺服电机带动转动盘反向转动即可使得四个夹爪相互远离,从而使得电池落入指定位置,并且通过布置有的检测探头可对电池表面进行检测,从而降低生产过程中出现的瑕疵品,无需人工复检,进而提高了生产效率,降低了生产成本。
技术特征:
1.一种用于电池检测的工业机器人,包括工业机器人主体(1),其特征在于:所述工业机器人主体(1)上安装有机械臂组件(2),机械臂组件(2)上安装有夹持装置(3),夹持装置(3)内开设有空腔(4),空腔(4)内布置有伺服电机(5),伺服电机(5)的输出轴上安装有转动盘(6),转动盘(6)上开设有若干沿圆周方向均匀分布的弧形滑槽(7),弧形滑槽(7)内滑动安装有t形连接轴(8),所述空腔(4)的底部内壁上沿圆周方向均匀开设有矩形滑槽(9),t形连接轴(8)滑动安装在矩形滑槽(9)内,所述t形连接轴(8)延伸出矩形滑槽(9)的一端安装有夹爪(11)。
2.根据权利要求1所述的一种用于电池检测的工业机器人,其特征在于:所述夹爪(11)呈弧形,四个夹爪(11)相互靠近的一侧均沿边缘均匀布置有若干防滑橡胶条(12)。
3.根据权利要求1所述的一种用于电池检测的工业机器人,其特征在于:所述弧形滑槽(7)的横截面呈t形,与t形连接轴(8)相适配。
4.根据权利要求1所述的一种用于电池检测的工业机器人,其特征在于:所述夹持装置(3)的底部中心位置布置有检测探头(10)。
5.根据权利要求1所述的一种用于电池检测的工业机器人,其特征在于:所述机械臂组件(2)与夹持装置(3)的连接处开设有插接槽(13),夹持装置(3)上安装有与插接槽(13)相适配的插接块(14)。
6.根据权利要求5所述的一种用于电池检测的工业机器人,其特征在于:所述机械臂组件(2)与插接块(14)上均开设有相适配的插孔,插接块(14)插入至插接槽(13)内时,插接块(14)上的插孔与机械臂组件(2)上的插孔相互对齐。
7.根据权利要求6所述的一种用于电池检测的工业机器人,其特征在于:所述插接块(14)插入至插接槽(13)内后,对齐的插孔内可插入固定螺栓(15),固定螺栓(15)上螺纹连接有螺帽(16),固定螺栓(15)的一端抵紧在机械臂组件(2)的一侧,螺纹连接在固定螺栓(15)上的螺帽(16)抵紧在机械臂组件(2)的另一侧。
技术总结
本技术公开了一种用于电池检测的工业机器人,包括工业机器人主体,在需要对电池进行夹持时,通过伺服电机带动转动盘转动,从而可通过转动盘上的弧形滑槽与T形连接轴进行相互配合,进而可使得四个被矩形滑槽限制移动方向的T形连接轴沿着弧形滑槽滑动的同时沿着矩形滑槽相互靠近或相互远离,从而实现对电池进行夹持的目的,并且通过四个夹爪上布置有的防滑橡胶条可进一步的提高夹爪的防滑性,避免电池在夹持过程中脱落,需要松开电池时仅需通过伺服电机带动转动盘反向转动即可使得四个夹爪相互远离,从而使得电池落入指定位置,并且通过布置有的检测探头可对电池表面进行检测,从而降低生产过程中出现的瑕疵品。
技术研发人员:张超,魏鹏鹏
受保护的技术使用者:昆山恒智信科电子设备有限公司
技术研发日:20230213
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!