一种机巢舱门自锁结构及无人机机巢的制作方法
本技术涉及无人机,特别是涉及一种机巢舱门自锁结构及无人机机巢。
背景技术:
1、随着无线通信技术、航空遥感测绘技术、gps导航定位技术及自动控制技术的发展,无人机发展迅速,广泛应用于基础建设规划、线路巡查、应急响应、地形测量等多个领域。无人机在工作一段时间后需要进行充电,从而保证其续航飞行。因此,无人机机巢应运而生,用于实现无人机的自动起降以及收纳后自动充电。
2、无人机机巢主要包括机巢主体及设置在机巢主体上的机巢舱门,常见的机巢舱门有单侧平开和两侧平开的方式。其中,现有的单侧平开的机巢舱门通过伺服电机驱动完成开合功能,然而,这种伺服电机的刹车功能比较局限,外力较大时还是可以强行打开机巢舱门,其所起到的自锁功能仍不理想。
技术实现思路
1、基于此,本实用新型的目的在于克服现有技术的不足,提供一种机巢舱门自锁结构,通过自锁装置能够有效提高机巢舱门的自锁功能,有效防止机巢舱门被外力拉扯打开。
2、为了实现上述目的,本实用新型采用的技术方案为:
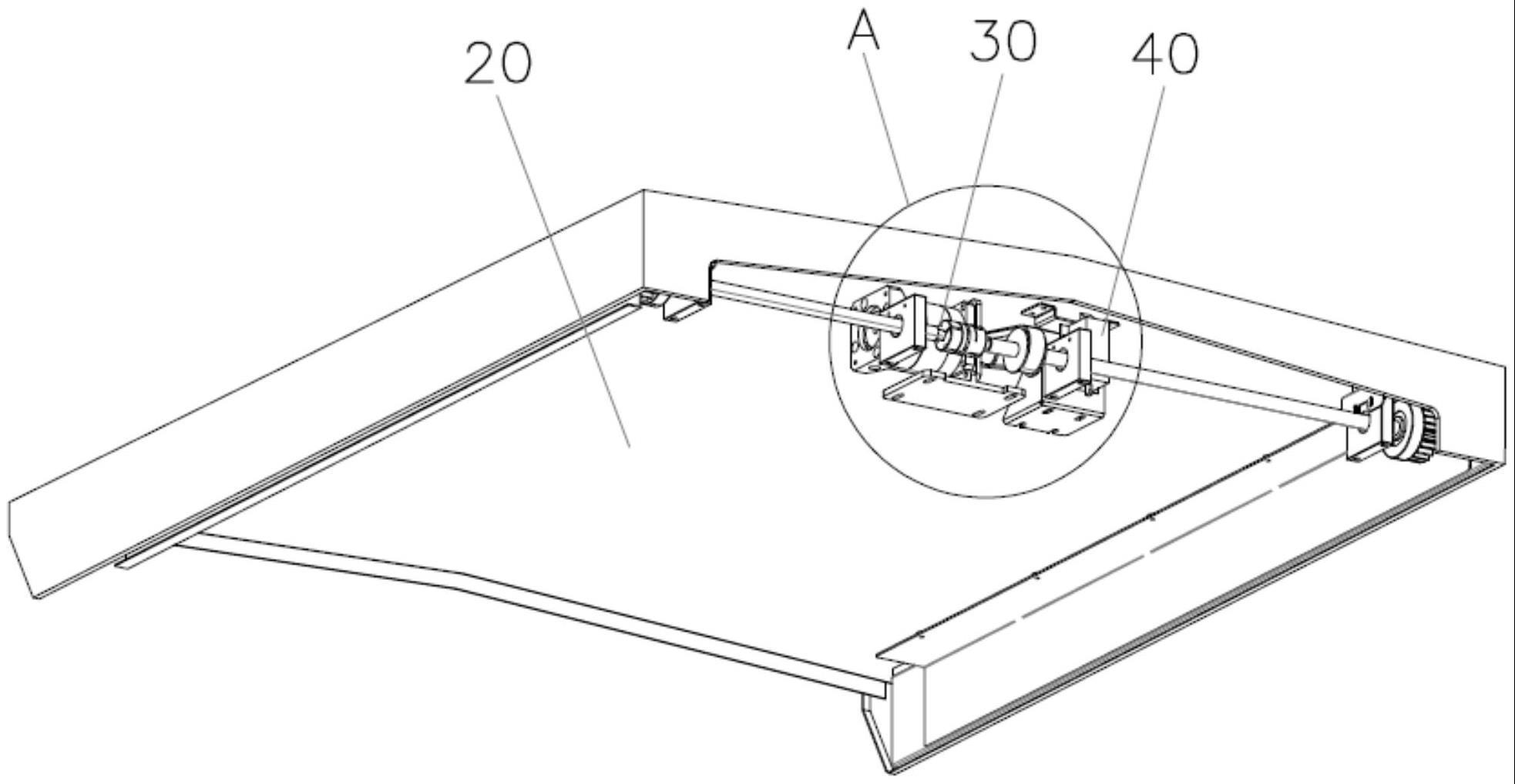
3、一种机巢舱门自锁结构,包括两条相对平行设置的直线导轨、单开舱门、丝杆驱动机构及自锁装置,所述单开舱门的两侧设置在两条直线导轨的顶部,所述丝杆驱动机构分别与两条直线导轨之间传动连接;所述单开舱门的内部分别间隔设有距离感应板和锁板,所述自锁装置包括距离感应器、控制器及电子锁,所述距离感应器用于感应所述距离感应板并将感应信号发送至所述控制器,所述控制器接收到所述感应信号后驱动所述电子锁与所述单开舱门的锁板配合锁紧。
4、作为一种实施方式,所述单开舱门为一侧及底部设有开口的罩体结构,所述距离感应板位于所述单开舱门远离其一侧设有开口的内部,所述丝杆驱动机构用于驱动两条直线导轨沿两条直线导轨的长度方向移动;
5、当所述丝杆驱动机构驱动两条直线导轨带动所述单开舱门移动至所述述距离感应器感应到所述距离感应板时,所述距离感应器将感应信号发送至所述控制器,所述控制器控制所述丝杆驱动机构停止运作,且驱动所述电子锁与所述单开舱门的锁板配合锁紧。
6、作为一种实施方式,所述电子锁包括锁体及设置在锁体上的舌销,所述锁体与所述控制器电连接,所述控制器接收到所述感应信号后驱动所述锁体上的舌销伸出并顶紧所述单开舱门的锁板。
7、作为一种实施方式,所述锁板为u型钣金结构,所述控制器接收到所述感应信号后驱动所述锁体上的舌销伸出并顶紧在所述锁板远离所述单开舱门侧壁开口的一侧。
8、作为一种实施方式,所述丝杆驱动机构包括驱动电机和丝杆,所述驱动电机与所述丝杆传动连接,所述丝杆的两端分别与两条直线导轨传动连接,所述驱动电机用于带动所述丝杆转动,进而通过所述丝杆带动两条直线导轨沿两条直线导轨的长度方向移动。
9、作为一种实施方式,所述丝杆驱动机构还包括转动轴承座和传动轮,所述丝杆与所述传动轮同轴刚性连接,且所述丝杆可转动地设置在所述转动轴承座上,所述驱动电机的输出端设有主动轮,所述主动轮与所述传动轮之间通过传输带传动连接。
10、作为一种实施方式,所述两条直线导轨的底部均为直线齿条,所述丝杆的两端分别同轴刚性连接有输出齿轮,两个输出齿轮分别与两条直线导轨的直线齿条啮合连接。
11、作为一种实施方式,所述驱动电机为伺服电机。
12、与传统技术相比,本实用新型的有益效果是:
13、本实用新型的单开舱门通过丝杆驱动机构驱动开合,并通过自锁装置的距离感应器对单开舱门中的距离感应板进行感应,再将感应信号发送至控制器,由控制器处理后驱动自锁装置的电子锁与单开舱门的锁板配合锁紧;实际应用中,本实用新型的单开舱门自锁结构安装在无人机的机巢主体上,当单开舱门移动至机巢主体的开口上端并闭合时,单开舱门的距离感应板刚好移动至距离感应器的一侧并被距离感应器感应,再经由控制器驱动电子锁的舌销伸出并顶紧所述单开舱门的锁板上,以此顶住单开舱门,有效防止单开舱门被外力打开;需要打开单开舱门时,通过控制器驱动电子锁的舌销缩回即可通过丝杆驱动机构驱动单开舱门打开。由此,本实用新型通过自锁装置能够有效提高机巢舱门的自锁功能,且结构简单,成本较低。
14、另外,本实用新型的另一目的是,提供一种无人机机巢,其包括如上任一项所述的机巢舱门自锁结构,还包括机巢主体,所述机巢舱门自锁结构安装在所述机巢主体上。
15、为了更好地理解和实施,下面结合附图详细说明本实用新型。
技术特征:
1.一种机巢舱门自锁结构,其特征在于:
2.根据权利要求1所述的机巢舱门自锁结构,其特征在于:
3.根据权利要求1所述的机巢舱门自锁结构,其特征在于:
4.根据权利要求3所述的机巢舱门自锁结构,其特征在于:
5.根据权利要求1所述的机巢舱门自锁结构,其特征在于:
6.根据权利要求5所述的机巢舱门自锁结构,其特征在于:
7.根据权利要求5所述的机巢舱门自锁结构,其特征在于:
8.根据权利要求5所述的机巢舱门自锁结构,其特征在于:
9.一种无人机机巢,其特征在于:
技术总结
本技术涉及一种机巢舱门自锁结构及无人机机巢,所述机巢舱门自锁结构包括两条相对平行设置的直线导轨、单开舱门、丝杆驱动机构及自锁装置,所述单开舱门的两侧设置在两条直线导轨的顶部,所述丝杆驱动机构分别与两条直线导轨之间传动连接;所述单开舱门的内部分别间隔设有距离感应板和锁板,所述自锁装置包括距离感应器、控制器及电子锁,所述距离感应器用于感应所述距离感应板并将感应信号发送至所述控制器,所述控制器接收到所述感应信号后驱动所述电子锁与所述单开舱门的锁板配合锁紧。本技术所述的机巢舱门自锁结构,通过自锁装置能够有效提高机巢舱门的自锁功能,有效防止机巢舱门被外力拉扯打开。
技术研发人员:潘屹峰,李勇,黄吴蒙,陈耿文
受保护的技术使用者:广州中科云图智能科技有限公司
技术研发日:20230213
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!