一种机器人防撞底盘的制作方法
本技术涉及机器人底盘技术,具体涉及一种机器人防撞底盘。
背景技术:
1、机器人受控于操作者,有时难免会在操作失误时遭受强烈撞击,而传统的机器人在底部防撞保护上的设计较少,在底部受到撞击后难以维持平衡而倒塌受损,如申请号为cn201711350534.7的一种机器人防撞保护型底座,包括底座体,所述底座体底部设有滚轮体,所述底座体外侧端面上环形安装设置有防撞保护带,所述防撞保护带上设有多个拨动滑轮,所述底座体侧端面上还设有多个凸垫块,所述防撞保护带上相同间距设置有多个转轴竖杆,所述拨动滑轮水平安装设置套于转轴竖杆上,所述防撞保护带凸出安装于所述底座体外侧端面中段位置上,所述底座体为圆柱形座体或者方形座体,所述防撞保护带为铝合金材质,所述凸垫块为弹性橡胶材质。
2、上述机器人保护型底座保护结构较为简单,遇到较为严重的撞击,环形装置的保护带的设置则难以承受和抵挡这样的冲击,容易造成机器人受损,且机器人携带物品稳固性不足。
技术实现思路
1、本实用新型的目的是提供一种机器人防撞底盘,以解决现有技术中的上述不足之处。
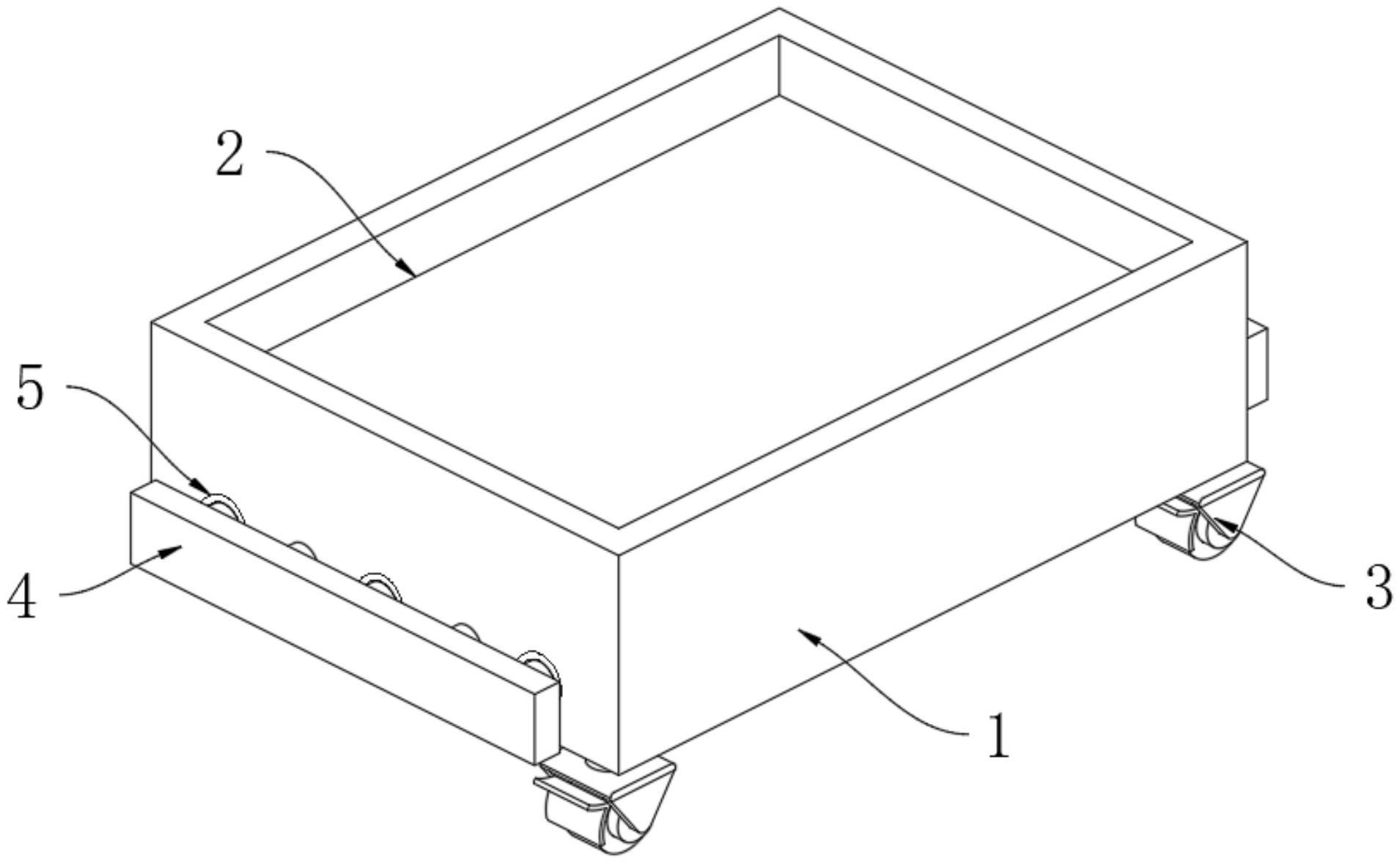
2、为了实现上述目的,本实用新型提供如下技术方案:一种机器人防撞底盘,包括机器人底盘,所述机器人底盘的顶端开设有顶槽,所述机器人底盘的相对应两端均安装有防撞板,所述机器人底盘的底端四角均固定连接有滚轮;
3、两个减震机构,两个所述减震机构安装于两个防撞板的一侧,两个所述减震机构的另一侧均与机器人底盘相连接;
4、圆柱体,所述圆柱体安装于防撞板的一侧,所述圆柱体的一端内嵌于机器人底盘中;
5、控速机构,所述控速机构安装于圆柱体的一端,所述控速机构包括与机器人底盘转动相连接的控速板。
6、进一步地,所述防撞板的材质为橡胶材质。
7、进一步地,所述减震机构包括固定于防撞板一侧的减震器,所述减震器的一端与机器人底盘固定连接,所述减震器的外表面套设有弹簧。
8、进一步地,所述机器人底盘的底端开设有底槽,所述控速机构包括固定于圆柱体一端的齿条。
9、进一步地,所述齿条的一侧啮合连接有齿轮,所述齿轮的中部固定连接有转轴,所述转轴的两端转动安装于底槽的内壁,所述转轴的外表面固定连接有控速板。
10、进一步地,所述控速板的材质为硅橡胶材质。
11、与现有技术相比,本实用新型提供的一种机器人防撞底盘,安装的防撞板在碰撞的一刻,通过减震机构降低机器人的晃动频率,与此同时通过圆柱体的横移带动齿条移动,进而控制控速板的转出,通过控速板与地面的摩擦降低机器人在地面上的移动速度,保证机器人上面物品的稳固性。
技术特征:
1.一种机器人防撞底盘,包括机器人底盘(1),其特征在于,所述机器人底盘(1)的顶端开设有顶槽(2),所述机器人底盘(1)的相对应两端均安装有防撞板(4),所述机器人底盘(1)的底端四角均固定连接有滚轮(3);
2.根据权利要求1所述的一种机器人防撞底盘,其特征在于,所述防撞板(4)的材质为橡胶材质。
3.根据权利要求1所述的一种机器人防撞底盘,其特征在于,所述减震机构(5)包括固定于防撞板(4)一侧的减震器(51),所述减震器(51)的一端与机器人底盘(1)固定连接,所述减震器(51)的外表面套设有弹簧(52)。
4.根据权利要求1所述的一种机器人防撞底盘,其特征在于,所述机器人底盘(1)的底端开设有底槽(6),所述控速机构(8)包括固定于圆柱体(7)一端的齿条(81)。
5.根据权利要求4所述的一种机器人防撞底盘,其特征在于,所述齿条(81)的一侧啮合连接有齿轮(82),所述齿轮(82)的中部固定连接有转轴(83),所述转轴(83)的两端转动安装于底槽(6)的内壁,所述转轴(83)的外表面固定连接有控速板(84)。
6.根据权利要求1所述的一种机器人防撞底盘,其特征在于,所述控速板(84)的材质为硅橡胶材质。
技术总结
本技术公开了一种机器人防撞底盘,涉及机器人底盘领域,包括机器人底盘,机器人底盘的顶端开设有顶槽,机器人底盘的相对应两端均安装有防撞板;两个减震机构,两个减震机构安装于两个防撞板的一侧,两个减震机构的另一侧均与机器人底盘相连接;圆柱体,圆柱体安装于防撞板的一侧,圆柱体的一端内嵌于机器人底盘中;控速机构,控速机构安装于圆柱体的一端,控速机构包括与机器人底盘转动相连接的控速板;该机器人防撞底盘,安装的防撞板在碰撞的一刻,通过减震机构降低机器人的晃动频率,与此同时通过圆柱体的横移带动齿条移动,进而控制控速板的转出,通过控速板与地面的摩擦降低机器人在地面上的移动速度,保证机器人上面物品的稳固性。
技术研发人员:易诗萍,许思敏
受保护的技术使用者:佛山市未来能力智能科技有限公司
技术研发日:20230222
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!