一种陪护机器人的制作方法
本技术涉及陪护机器人,具体为一种陪护机器人。
背景技术:
1、目前,随着科学技术不断的发展,机器人的种类日趋多样化,例如扫地机器人、装配机器人和足球机器人等,机器人已经逐渐的融入到人们的日常生活和生产中,并且机器人的使用范围已开始向国家安全、特殊环境服役、医疗辅助、科学考察等多个领域扩展,现有的机器人虽然供能十分全面,而陪护机器人多是用于陪伴留守儿童或者独居老人。
2、如公开号为cn216098966u的一种陪护机器人,该实用新型涉及机器人技术领域,具体涉及一种陪护机器人,包括升降机构,所述升降机构的一侧转动设置有伸缩机构,所述伸缩机构包括两个相互啮合的齿轮,两个所述齿轮中均固定连接有转动轴。本实用新型中,通过于陪护机器人的伸缩机构中的伺服电机能带动两个齿轮进行啮合转动,从而能带动着两个转动杆一和转动杆二进行折叠转动,从而能便于调节移动板和陪伴人员之间的距离,通过移动板顶部的电动伸缩杆能顶起安装板,使得安装板两端的滑杆在滑槽柱中进行滑动,从而能调节安装板中触摸屏的倾斜角度,这样能便于陪伴人员进行操作,便于陪伴人员通过触摸屏和机器人进行游戏等互动,从而能起到较好的陪伴效果。
3、综合上述,可知现有技术中存在以下技术问题:现有的陪护机器人只能完成语音问答以及移动功能,并无机械手存在,即使是有,也并没有抓取功能,更多是作为装饰存在,为此,我们提供了一种陪护机器人。
技术实现思路
1、本实用新型的目的在于提供一种陪护机器人,以解决上述背景技术中提出的问题。
2、为了解决上述的技术问题,本实用新型采用了如下技术方案:
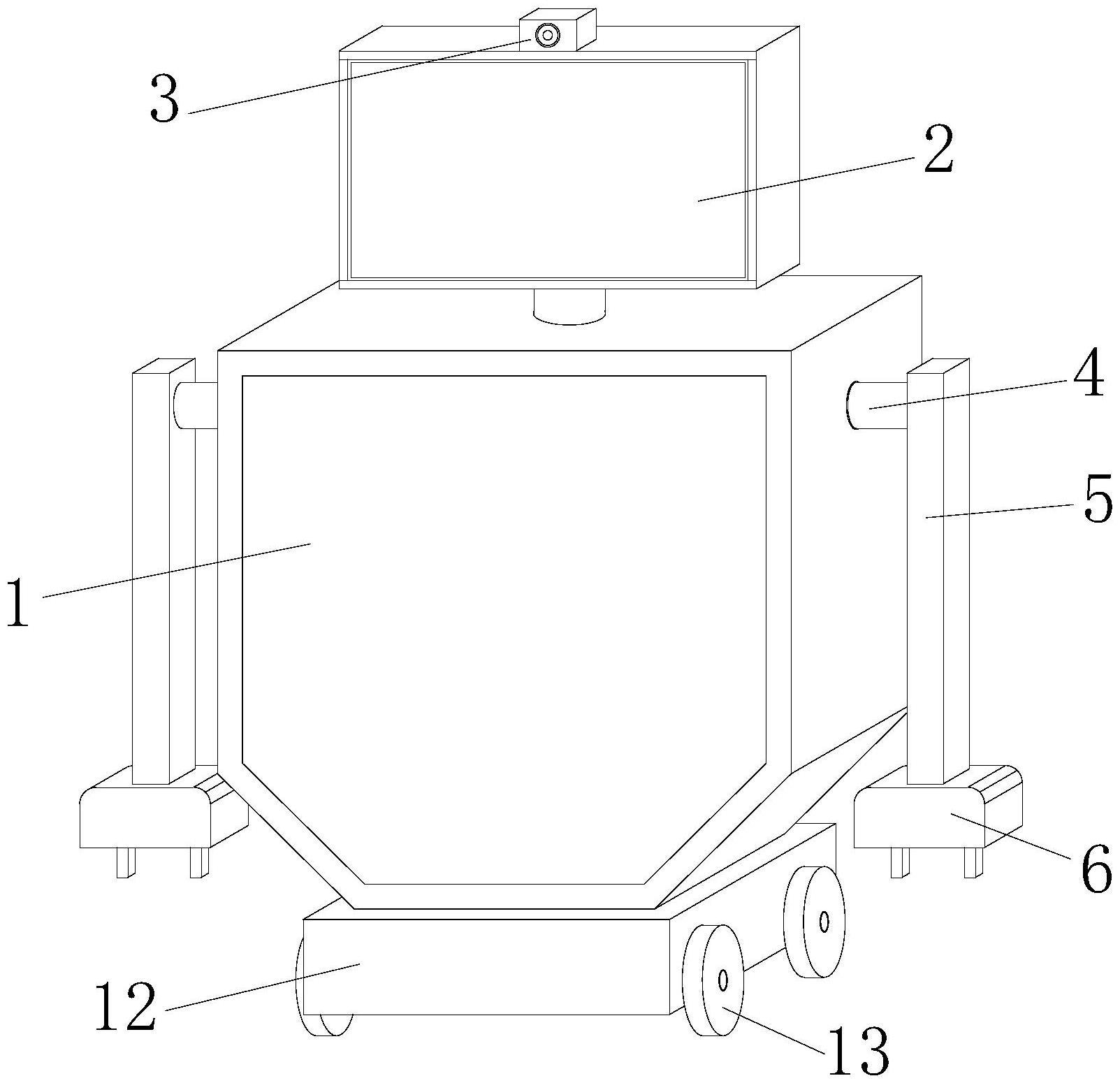
3、一种陪护机器人,包括机器人本体,所述机器人本体的上方设置有显示屏,所述显示屏的上表面安装有摄像头,所述机器人本体的两侧均设置有连接杆,所述连接杆的末端设置有机械臂,所述机械臂的下表面设置有抓取件,所述抓取件的内部设置有双轴马达,所述双轴马达的输出轴连接有丝杆,所述丝杆的外壁连接有活动块,所述活动块的一侧连接有导向杆,所述活动块的下表面固定有夹持块。
4、优选的,所述摄像头与显示屏之间为螺钉连接,所述双轴马达与抓取件之间为固定连接,且丝杆与双轴马达之间构成旋转结构。
5、优选的,所述丝杆贯穿至活动块的内部,且夹持块通过活动块和导向杆与抓取件之间构成滑动结构。
6、优选的,所述机器人本体还设有:
7、固定座,其设置在所述机器人本体的下表面,所述固定座的两侧均安装有行走轮,所述机器人本体的内部设置有驱动马达,所述驱动马达的输出轴连接有传动杆。
8、优选的,所述驱动马达与机器人本体之间为固定连接,且显示屏通过传动杆与驱动马达之间构成旋转结构。
9、优选的,所述连接杆还设有:
10、从动齿轮,其设置在所述连接杆的一侧,所述从动齿轮的下表面连接有主动齿轮,所述主动齿轮的一侧连接有调节马达。
11、优选的,所述从动齿轮通过主动齿轮与调节马达之间构成旋转结构,且连接杆与从动齿轮之间为固定连接。
12、上述描述可以看出,通过本申请的上述的技术方案,必然可以解决本申请要解决的技术问题。
13、同时,通过以上技术方案,本实用新型至少具备以下有益效果:
14、本实用新型通过机器人本体上设置的显示屏,方便使用者和该陪护机器人进行交互操作,且通过抓取件内设置的双轴马达,能够驱动夹持机构运动,从而对物品进行抓取操作,提高该陪护机器人的实用性;通过设置的导向杆,能够保证活动块运动时的稳定性,使得两个夹持块相互靠近,从而对物品进行抓取操作,使得该陪护机器人具有对物品抓取的效果,便于使用;
15、本实用新型通过机器人本体内设置的驱动马达,能够带动传动杆旋转,从而带动显示屏进行转动,这样能够对显示屏的角度进行调节,方便人们的使用;通过设置的调节马达,能够带动主动齿轮啮合从动齿轮旋转,从而带动连接杆进行转动,这样能够对抓取件的位置进行调节,方便对物品进行抓取。
技术特征:
1.一种陪护机器人,其特征在于,包括:
2.根据权利要求1所述的一种陪护机器人,其特征在于,所述摄像头(3)与显示屏(2)之间为螺钉连接,所述双轴马达(7)与抓取件(6)之间为固定连接,且丝杆(8)与双轴马达(7)之间构成旋转结构。
3.根据权利要求1所述的一种陪护机器人,其特征在于,所述丝杆(8)贯穿至活动块(9)的内部,且夹持块(11)通过活动块(9)和导向杆(10)与抓取件(6)之间构成滑动结构。
4.根据权利要求1所述的一种陪护机器人,其特征在于,所述机器人本体(1)还设有:
5.根据权利要求4所述的一种陪护机器人,其特征在于,所述驱动马达(14)与机器人本体(1)之间为固定连接,且显示屏(2)通过传动杆(15)与驱动马达(14)之间构成旋转结构。
6.根据权利要求1所述的一种陪护机器人,其特征在于,所述连接杆(4)还设有:
7.根据权利要求6所述的一种陪护机器人,其特征在于,所述从动齿轮(16)通过主动齿轮(17)与调节马达(18)之间构成旋转结构,且连接杆(4)与从动齿轮(16)之间为固定连接。
技术总结
本技术涉及陪护机器人技术领域,具体为一种陪护机器人,包括机器人本体,所述机器人本体的上方设置有显示屏,所述显示屏的上表面安装有摄像头,所述机器人本体的两侧均设置有连接杆,所述连接杆的末端设置有机械臂,所述机械臂的下表面设置有抓取件,所述抓取件的内部设置有双轴马达,所述双轴马达的输出轴连接有丝杆,所述丝杆的外壁连接有活动块,所述活动块的一侧连接有导向杆,所述活动块的下表面固定有夹持块。本技术通过机器人本体上设置的显示屏,方便使用者和该陪护机器人进行交互操作,且通过抓取件内设置的双轴马达,能够驱动夹持机构运动,从而对物品进行抓取操作,提高该陪护机器人的实用性。
技术研发人员:孙鹏,朱友
受保护的技术使用者:扬州弘飞信息科技有限公司
技术研发日:20230222
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!