一种自动送料机械手的制作方法
本技术涉及自动送料,尤其涉及一种自动送料机械手。
背景技术:
1、自动送料机械手是通过既定程序把物品从一个位置送到另一个位置,不需人为地干预即可自动准确的完成,在产品加工过程中,可以实现加工件的转移和上料加工,主要用于各种 材料和工业产品半产品的输送,也能配合下道工序使生产自动化。但是现有的送料机械手在进行送料工作时,有一个间歇的停止运动,在将一个物品从一个位置送到另一个位置的过程中需要有个停顿,导致实际的工作效率低。因此,本领域技术人员提供了一种自动送料机械手,以解决上述背景技术中提出的问题。
技术实现思路
1、鉴于现有技术中存在的上述问题,本实用新型的主要目的在于提供一种自动送料机械手。
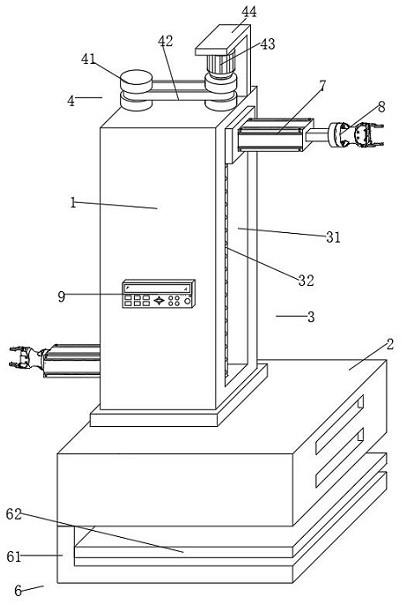
2、本实用新型的技术方案是这样的:一种自动送料机械手,包括主体和安装座,所述主体通过转动组件连接在安装座的顶部,所述安装座的底部连接有固定组件,所述主体的两侧通过升降组件连接有电动伸缩杆,所述电动伸缩杆的输出端固定连接有电动机械爪;
3、所述升降组件包括滑动槽,所述主体的两侧对称开设有滑动槽,所述滑动槽内部转动连接有往复丝杠,所述往复丝杠的外侧且位于滑动槽的内部螺纹连接有滑动块,所述滑动块远离主体的一侧固定安装有电动伸缩杆,两个所述滑动槽通过传动组件传动连接。
4、作为一种优选的实施方式,所述传动组件包括皮带轮,所述往复丝杠远离安装座的一端延伸至主体顶部且固定安装有皮带轮,两个所述皮带轮的外侧设置有皮带,所述主体顶部靠近其中一个皮带轮的一侧固定安装有安装架,所述安装架底部固定安装有一号电机,所述一号电机的输出端与其中一个皮带轮的固定连接。
5、作为一种优选的实施方式,所述转动组件包括转动槽,所述安装座内部开设有转动槽,所述转动槽内部转动连接有转动杆,所述转动杆的一端延伸至安装座的上方且固定安装有转动板,所述转动板的顶部与主体的底部固定连接,所述转动杆内部且位于转动槽内部固定连接有全齿轮,所述转动槽内部靠,转动杆的一侧固定安装有二号电机,所述二号电机的输出端固定安装有半齿轮,所述半齿轮与全齿轮啮合连接。
6、作为一种优选的实施方式,所述固定组件包括固定架,所述安装座的底部固定安装有固定架,所述固定架的底部螺纹连接有螺纹杆,所述 螺纹杆靠近主体的一侧转动连接有固定板。
7、作为一种优选的实施方式,所述固定板与固定架滑动连接。
8、作为一种优选的实施方式,所述滑动块与滑动槽滑动连接,两个所述滑动块的初始位置相反。
9、作为一种优选的实施方式,所述主体的表面固定安装有控制面板,所述一号电机、二号电机、电动伸缩杆和电动机械爪均与控制面板电性连接。
10、与现有技术相比,本实用新型的优点和积极效果在于,
11、本实用新型中,在使用时,通过设置的升降组件,当其中一个电动伸缩杆上的电动机械爪夹持工件移动至最顶端时,另一个电动伸缩杆处于最低端时,如图所示,此时启动转动组件,带动其转动度,另一个电动伸缩杆和电动机械爪去夹持工件,其中一个电动机械爪将工件放下,两个电动机械爪间歇交替工作,提高工作效率。
技术特征:
1.一种自动送料机械手,包括主体(1)和安装座(2),其特征在于:所述主体(1)通过转动组件(5)连接在安装座(2)的顶部,所述安装座(2)的底部连接有固定组件(6),所述主体(1)的两侧通过升降组件(3)连接有电动伸缩杆(7),所述电动伸缩杆(7)的输出端固定连接有电动机械爪(8);
2.根据权利要求1所述的一种自动送料机械手,其特征在于:所述传动组件(4)包括皮带轮(41),所述往复丝杠(32)远离安装座(2)的一端延伸至主体(1)顶部且固定安装有皮带轮(41),两个所述皮带轮(41)的外侧设置有皮带(42),所述主体(1)顶部靠近其中一个皮带轮(41)的一侧固定安装有安装架(44),所述安装架(44)底部固定安装有一号电机(43),所述一号电机(43)的输出端与其中一个皮带轮(41)的固定连接。
3.根据权利要求1所述的一种自动送料机械手,其特征在于:所述转动组件(5)包括转动槽(51),所述安装座(2)内部开设有转动槽(51),所述转动槽(51)内部转动连接有转动杆(52),所述转动杆(52)的一端延伸至安装座(2)的上方且固定安装有转动板(55),所述转动板(55)的顶部与主体(1)的底部固定连接,所述转动杆(52)内部且位于转动槽(51)内部固定连接有全齿轮(53),所述转动槽(51)内部靠,转动杆(52)的一侧固定安装有二号电机(56),所述二号电机(56)的输出端固定安装有半齿轮(54),所述半齿轮(54)与全齿轮(53)啮合连接。
4.根据权利要求1所述的一种自动送料机械手,其特征在于:所述固定组件(6)包括固定架(61),所述安装座(2)的底部固定安装有固定架(61),所述固定架(61)的底部螺纹连接有螺纹杆(62),所述 螺纹杆(62)靠近主体(1)的一侧转动连接有固定板(63)。
5.根据权利要求4所述的一种自动送料机械手,其特征在于:所述固定板(63)与固定架(61)滑动连接。
6.根据权利要求1所述的一种自动送料机械手,其特征在于:所述滑动块(33)与滑动槽(31)滑动连接,两个所述滑动块(33)的初始位置相反。
7.根据权利要求2所述的一种自动送料机械手,其特征在于:所述主体(1)的表面固定安装有控制面板(9),所述一号电机(43)、二号电机(56)、电动伸缩杆(7)和电动机械爪(8)均与控制面板(9)电性连接。
技术总结
本技术涉及一种自动送料机械手,包括主体和安装座,所述主体通过转动组件连接在安装座的顶部,所述安装座的底部连接有固定组件,所述主体的两侧通过升降组件连接有电动伸缩杆,所述电动伸缩杆的输出端固定连接有电动机械爪。本技术的有益效果在于,在使用时,通过设置的升降组件,当其中一个电动伸缩杆上的电动机械爪夹持工件移动至最顶端时,另一个电动伸缩杆处于最低端时,如图所示,此时启动转动组件,带动其转动度,另一个电动伸缩杆和电动机械爪去夹持工件,其中一个电动机械爪将工件放下,两个电动机械爪间歇交替工作,提高工作效率。
技术研发人员:陈永报,蒲建,兰远健
受保护的技术使用者:四川博尔特机器人科技有限公司
技术研发日:20230302
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!