一种多功能伸缩臂机器人的制作方法
本技术涉及机械人设备,尤其涉及一种多功能伸缩臂机器人。
背景技术:
1、机器人,是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机械人本体由伸缩臂与机械手组合而成,伸缩臂用于将机械手送至指定工作区域,机械手通过编程成型,进行复杂的运动操作;
2、以公开号为cn214560861u所示的多功能便携式伸缩臂机器人,本多功能便携式伸缩臂机器人,包括底盘,所述底盘的底部设有行走机构,所述底盘的顶部铰接有伸缩大臂的一端,所述伸缩大臂的相对两侧与所述底盘之间均设有倾斜油缸,所述伸缩大臂内设有伸缩油缸,所述伸缩大臂与所述伸缩油缸的活塞杆铰接在所述底盘上,所述伸缩油缸的本体固定在伸缩中臂的一端上,所述伸缩中臂的一端滑动伸入到所述伸缩大臂内,所述伸缩中臂的另一端固定设有伸缩小臂;
3、在上述装置中,虽然可以可安装不同属具,遥控可折叠设计,但其在使用的过程中,机械臂不具备稳定伸缩的功能,机械臂的角度不能灵活调节。
技术实现思路
1、本实用新型的目的是为了解决现有的多功能伸缩臂机器人,机械臂不具备稳定伸缩的功能,机械臂的角度不能灵活调节的缺点,而提出的一种多功能伸缩臂机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种多功能伸缩臂机器人,包括有底座,所述底座上端面一侧通过轴承转动安装有转动件一,所述转动件一内腔安装有外臂,所述外臂内腔套接有内臂,所述内臂延长端固定有连接件,所述外臂两侧分别固定有液压推杆一,所述底座上端面另一侧通过轴承转动安装有转动件二,所述转动件二上端面固定有液压推杆二,所述外臂表面固定有导轨,所述导轨表面套接插设有滑套;
4、所述外臂表面嵌合有料盒,所述料盒内腔中端固定有漏网,所述料盒内腔一侧转动安装有多个涂抹辊,所述料盒上端面嵌合有进料口,所述进料口内腔插接有橡胶塞;
5、所述连接件内腔套接有连接块,所述连接件与所述连接块之间安装有紧固螺栓,所述连接块表面固定有电机仓,所述电机仓表面转动连接有转盘,所述电机仓内腔固定有驱动电机。
6、作为上述技术方案的进一步描述:
7、所述液压推杆一伸缩端与连接件固定连接,用于推动内臂伸缩移动。
8、作为上述技术方案的进一步描述:
9、所述液压推杆二伸缩端通过转轴与滑套转动连接。
10、作为上述技术方案的进一步描述:
11、所述外臂上端面开设有通槽,与所述料盒开口端相连接。
12、作为上述技术方案的进一步描述:
13、所述驱动电机输出端穿过所述电机仓与转盘固定连接,用于驱动转盘旋转。
14、综上,由于采用了上述技术方案,本实用新型的有益效果是:
15、本实用新型中,该机械臂的内壁通过两侧的液压推杆,进行稳定的伸缩推动,使其机械臂的使用更为安全,同时内臂在移动的过程中,可以使其贴合的涂抹辊旋转,对内臂表面自动涂抹润滑剂,降低内臂移动的磨损,且机械臂与机械手之间,通过便捷装配的圆盘进行安装,使得机械臂与机械手之间能够灵活装配。
技术特征:
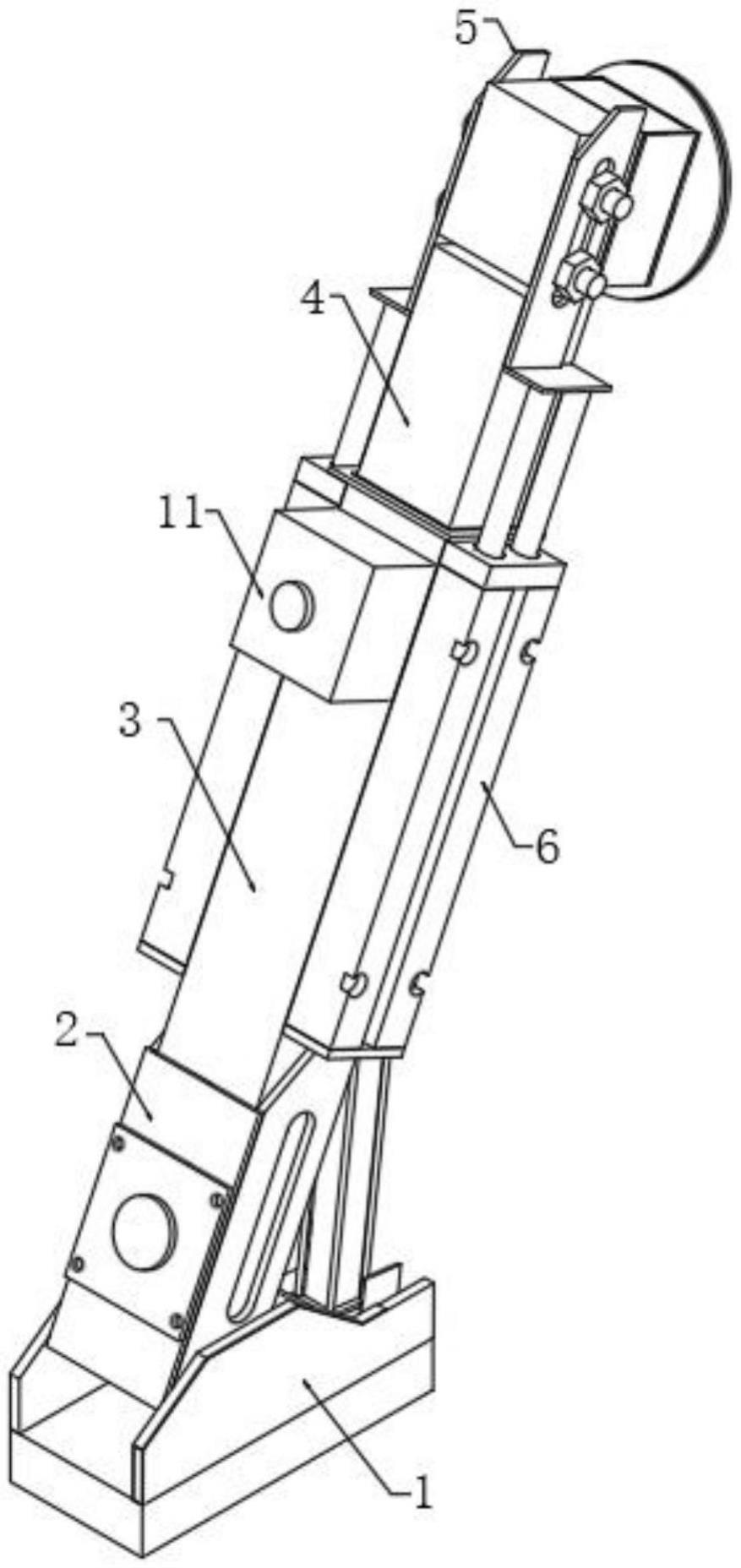
1.一种多功能伸缩臂机器人,包括有底座(1),其特征在于:所述底座(1)上端面一侧通过轴承转动安装有转动件一(2),所述转动件一(2)内腔安装有外臂(3),所述外臂(3)内腔套接有内臂(4),所述内臂(4)延长端固定有连接件(5),所述外臂(3)两侧分别固定有液压推杆一(6),所述底座(1)上端面另一侧通过轴承转动安装有转动件二(7),所述转动件二(7)上端面固定有液压推杆二(8),所述外臂(3)表面固定有导轨(9),所述导轨(9)表面套接插设有滑套(10);
2.根据权利要求1所述的一种多功能伸缩臂机器人,其特征在于:所述液压推杆一(6)伸缩端与连接件(5)固定连接,用于推动内臂(4)伸缩移动。
3.根据权利要求1所述的一种多功能伸缩臂机器人,其特征在于:所述液压推杆二(8)伸缩端通过转轴与滑套(10)转动连接。
4.根据权利要求1所述的一种多功能伸缩臂机器人,其特征在于:所述外臂(3)上端面开设有通槽,与所述料盒(11)开口端相连接。
5.根据权利要求1所述的一种多功能伸缩臂机器人,其特征在于:所述驱动电机(20)输出端穿过所述电机仓(18)与转盘(19)固定连接,用于驱动转盘(19)旋转。
技术总结
本技术公开了一种多功能伸缩臂机器人,包括有底座,所述底座上端面一侧通过轴承转动安装有转动件一,所述转动件一内腔安装有外臂,所述外臂内腔套接有内臂,所述内臂延长端固定有连接件,所述外臂两侧分别固定有液压推杆一,所述底座上端面另一侧通过轴承转动安装有转动件二,所述转动件二上端面固定有液压推杆二,所述外臂表面固定有导轨。本技术中,该机械臂的内壁通过两侧的液压推杆,进行稳定的伸缩推动,使其机械臂的使用更为安全,同时内臂在移动的过程中,可以使其贴合的涂抹辊旋转,对内臂表面自动涂抹润滑剂,降低内臂移动的磨损,且机械臂与机械手之间,通过便捷装配的圆盘进行安装,使得机械臂与机械手之间能够灵活装配。
技术研发人员:张耀日,乔丹林,郭睿,刘浩祺
受保护的技术使用者:中科云智(深圳)科技有限公司
技术研发日:20230308
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!