一种用于辅助喂食的机器人
本申请属于机器人,具体涉及一种用于辅助喂食的机器人。
背景技术:
1、随着社会的不断发展,人口老龄化不断加剧。伴随老人年纪的增长,一些老年人的生理机能逐渐衰弱,许多生活不能够自理。同时,社会中还存在有大量残疾人群,这就给老年人、残疾人的家人或者护理人员增加了很多的工作量。根据调查,如今最常用的喂食机器人多需人工将食物放到餐桌上再进行喂食,可以完成自动一体化的报道较为鲜见。
2、如今机器人行业蓬勃发展,外加助老助残领域的不断建设,助老助残机器人将具有广泛的市场。因此,有必要设计一种全自动多模块的辅助喂食机器人,以解决上述问题。
技术实现思路
1、本申请提供一种用于辅助喂食的机器人,以解决上述的技术问题。
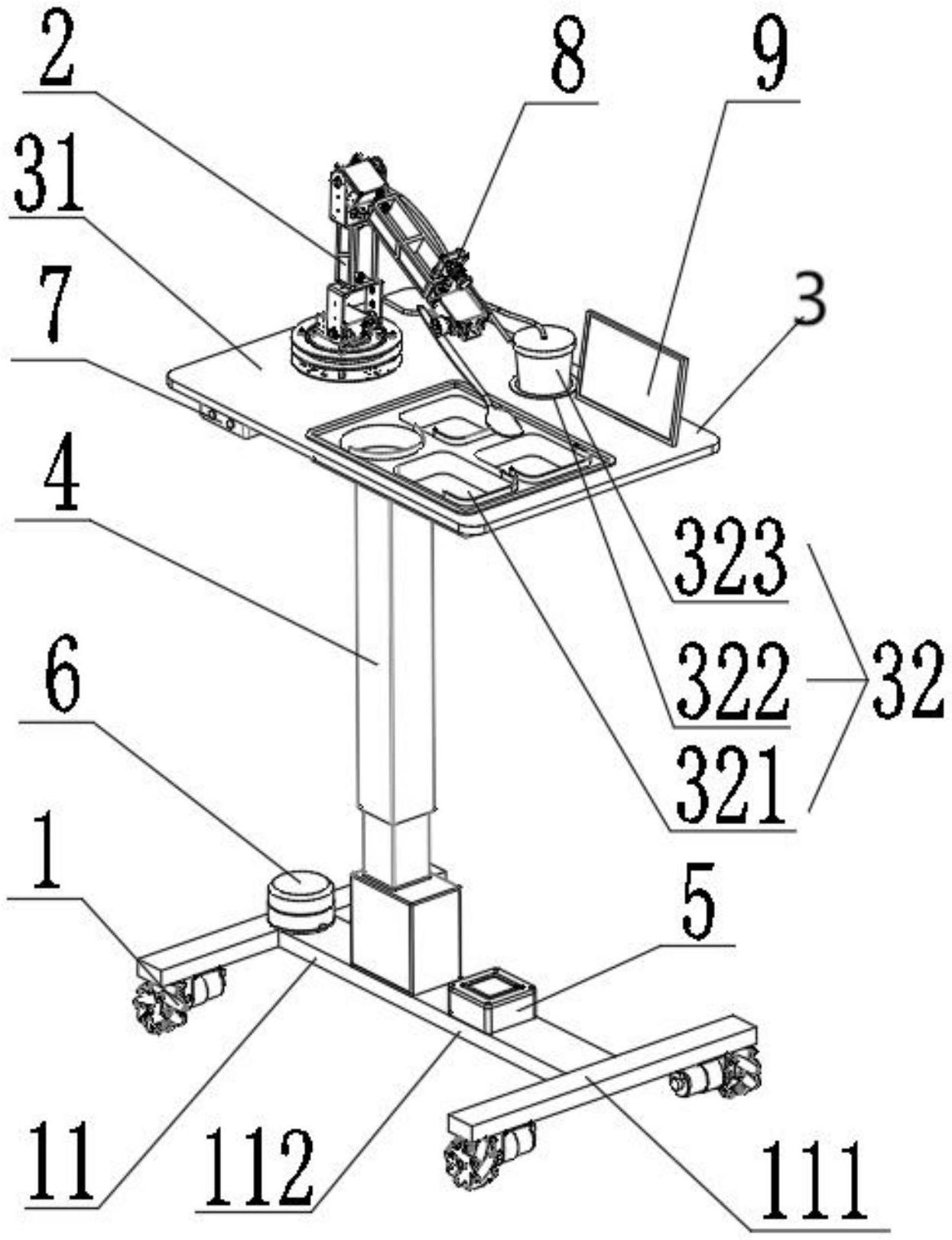
2、为解决上述技术问题,本申请采用的一个技术方案是:一种用于辅助喂食的机器人,包括:移动组件、机械臂组件、餐板组件和升降组件;移动组件包括底架,餐板组件包括餐板以及位于餐板上端的饮食组件,底架与餐板通过升降组件平行连接,餐板的上端固接有用于控制饮食组件进行喂食操作的机械臂组件;其中,底架上端设置有电池盒和激光雷达,餐板的底部设有语音识别模块,餐板的上端设有触摸屏,摄像模块通过相机固定板与机械臂组件的前端连接。
3、进一步,底架呈“工”字形结构设置,且底架两边平行设置有短杆,短杆的中端通过长杆连接,升降组件固接于长杆上方,其中,长杆的长度与餐板的长度对应,短杆的长度与餐板的宽度对应。
4、进一步,移动组件还包括电机支架、电机以及驱动轮,短杆两侧的底部设有电机支架和驱动轮,电机设置于电机支架中,且电机通过联轴器与驱动轮连接。
5、进一步,饮食组件还包括餐盘和杯托,餐盘和杯托设置于餐板上方的凹槽中,餐盘的侧端设有防推边,杯托中设有水杯。
6、进一步,机械臂组件包括腰部回转机构、大臂机构、小臂机构和取食机构;腰部回转机构通过底部圆盘固接餐板;大臂机构中的大臂舵机与腰部回转机构枢接,大臂机构与小臂机构的小臂舵机枢接;取食机构包括与小臂机构转动连接的餐勺以及固定于吸管导向器中的吸管。
7、进一步,腰部回转机构包括腰部回转舵机、与腰部回转舵机的输出轴同心安装的舵盘以及腰部转盘;腰部回转舵机通过固接在底部圆盘上,舵盘上方同心连接腰部转盘,腰部转盘上方通过舵机座连接大臂舵机。
8、进一步,大臂机构包括与大臂舵机枢接的第一支架、与小臂舵机枢接的第二支架以及大臂支架,大臂支架的两端分别与第一支架和第二支架连接,其中,第一支架和第二支架均为u形支架。
9、进一步,小臂机构还包括餐勺舵机和小臂支架,小臂舵机通过第一直角舵机座与小臂支架的一端连接,餐勺舵机通过第二直角舵机座与小臂支架的另一端连接。
10、进一步,餐勺通过餐勺固定器设置于餐勺舵机中的舵盘中,餐勺固定器设有与餐勺对应的开槽。
11、进一步,吸管一端插入水杯中;吸管另一端穿过第一吸管导向器、第二吸管导向器和第三吸管导向器,并延伸至第三吸管导向器前方的预定长度;第三吸管导向器设置于第二直角舵机座的侧面,第二吸管导向器设置于第二支架的侧面,第一吸管导向器设置于第一支架的侧面。
12、本申请的有益效果是:
13、(1)本申请通过移动组件的行走功能,不同于市场上常见的辅助喂食机器人,需要操作人员将机器人放置到餐桌上,行走功能使得其工作范围更广,工作效率更高。驱动轮有利于机器人轻松改变方向,灵活性高,便于在室内狭窄空间内移动和转向。
14、(2)装备有激光雷达,通过测距扫描进行slam建模实现导航与避障,能够自动行驶到用户用餐位置,灵活程度更高;机器人不仅能够满足家庭范围的用餐需求,更适合于医院、养老院和疗养院等地方的大范围大量喂食工作,有效减少了医护人员短缺、人工辅助喂食消耗时间长等问题。
15、(3)升降组件能够根据不同用户的用餐体验和习惯进行用餐位置的调整;语音识别模块将机器人的操作简单化,从而方便用餐者操控机器人,使得机器人人性化程度高;触摸屏可进行更多的功能操作和显示机器人性能参数和用餐数据。
16、(4)增加饮水功能,现有的辅助喂食机器人缺少饮水功能,功能不够全面,该机器人通过机械臂将吸管移动至用餐者嘴前,功能全面从而提高就餐体验。
17、(5)摄像模块可以采用人脸识别技术,精确定位人嘴位置,实现辅助喂食功能的精确性,同时采用食物识别技术,辅助机械臂取食功能,确保餐勺取到食物,智能化程度高。
技术特征:
1.一种用于辅助喂食的机器人,其特征在于,包括:
2.根据权利要求1所述的一种辅助喂食机器人,其特征在于,所述底架呈“工”字形结构设置,且所述底架两边平行设置有短杆,所述短杆的中端通过长杆连接,所述升降组件固接于所述长杆上方,其中,所述长杆的长度与所述餐板的长度对应,所述短杆的长度与所述餐板的宽度对应。
3.根据权利要求2所述的一种辅助喂食机器人,其特征在于,所述移动组件还包括电机支架、电机以及驱动轮,所述短杆两侧的底部设有所述电机支架和驱动轮,所述电机设置于所述电机支架中,且所述电机通过联轴器与所述驱动轮连接。
4.根据权利要求1所述的一种辅助喂食机器人,其特征在于,所述饮食组件还包括餐盘和杯托,所述餐盘和所述杯托设置于所述餐板上方的凹槽中,所述餐盘的侧端设有防推边,所述杯托中设有水杯。
5.根据权利要求4所述的一种辅助喂食机器人,其特征在于,所述机械臂组件包括腰部回转机构、大臂机构、小臂机构和取食机构;所述腰部回转机构通过底部圆盘固接所述餐板;所述大臂机构中的大臂舵机与所述腰部回转机构枢接,所述大臂机构与所述小臂机构的小臂舵机枢接;所述取食机构包括与小臂机构转动连接的餐勺以及固定于吸管导向器中的吸管。
6.根据权利要求5所述的一种辅助喂食机器人,其特征在于,所述腰部回转机构包括腰部回转舵机、与所述腰部回转舵机的输出轴同心安装的舵盘以及腰部转盘;所述腰部回转舵机通过固接在所述底部圆盘上,所述舵盘上方同心连接所述腰部转盘,所述腰部转盘上方通过舵机座连接所述大臂舵机。
7.根据权利要求6所述的一种辅助喂食机器人,其特征在于,所述大臂机构包括与所述大臂舵机枢接的第一支架、与所述小臂舵机枢接的第二支架以及大臂支架,所述大臂支架的两端分别与所述第一支架和所述第二支架连接,其中,所述第一支架和所述第二支架均为u形支架。
8.根据权利要求7所述的一种辅助喂食机器人,其特征在于,所述小臂机构还包括餐勺舵机和小臂支架,所述小臂舵机通过第一直角舵机座与所述小臂支架的一端连接,所述餐勺舵机通过第二直角舵机座与所述小臂支架的另一端连接。
9.根据权利要求8所述的一种辅助喂食机器人,其特征在于,所述餐勺通过餐勺固定器设置于所述餐勺舵机中的所述舵盘中,所述餐勺固定器设有与所述餐勺对应的开槽。
10.根据权利要求8所述的一种辅助喂食机器人,其特征在于,所述吸管一端插入所述水杯中;所述吸管另一端穿过第一吸管导向器、第二吸管导向器和第三吸管导向器,并延伸至所述第三吸管导向器前方的预定长度;所述第三吸管导向器设置于所述第二直角舵机座的侧面,所述第二吸管导向器设置于所述第二支架的侧面,所述第一吸管导向器设置于所述第一支架的侧面。
技术总结
本申请公开了一种用于辅助喂食的机器人,包括:移动组件、机械臂组件、餐板组件和升降组件;移动组件包括底架,餐板组件包括餐板以及位于餐板上端的饮食组件,底架与餐板通过升降组件平行连接,餐板的上端固接有用于控制饮食组件进行喂食操作的机械臂组件;其中,底架上端设置有电池盒和激光雷达,餐板的底部设有语音识别模块,餐板的上端设有摄像模块以及触摸屏。本申请通过移动组件的行走功能,使得其工作范围更广,工作效率更高。激光雷达,通过测距扫描进行slam建模实现导航与避障,能够自动行驶到用户用餐位置。同时通过人脸识别技术,精确定位人嘴位置,实现辅助喂食功能的精确性。
技术研发人员:张森,张健明,郁博文,白锐杰,叶凌寒,张城,钱永明
受保护的技术使用者:南通大学
技术研发日:20230320
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!