一种可抓吸多物品的机器人夹爪的制作方法
本技术涉及机器人夹爪,具体涉及一种可抓吸多物品的机器人夹爪。
背景技术:
1、近年来,随着人工智能行业的高速发展,大量机器人在制造业生产、医疗、服务、教育、交通、通信等领域被广泛应用,其中对机器人末端夹爪样式的需求也越来越多。机器人通过夹爪抓取物品,先启动夹爪对物品进行抓取,再通过相应的操作控制机器人对物品进行转移。转移过程中对夹爪抓取的稳定性要求很高,即要求机器人夹爪对不同外形的物品抓取牢固。
2、目前市场上常见的机器人夹爪只有一对平型爪指,难以稳妥夹取规格不同和形状多变的物品,不仅影响转移工作效率,而且常常因为夹持不稳导致物品掉落损坏。针对不同型号的机器人还得定制不同的机器人夹爪,且夹爪不能多角度安装,极大的影响抓取效率。
技术实现思路
1、本实用新型的目的在于:针对上述现有技术存在的问题,提出一种可以按需妥善夹持规格不同、形状多变的物品,且可以适配于不同型号机器人安装,并可以根据抓取场景多角度安装。
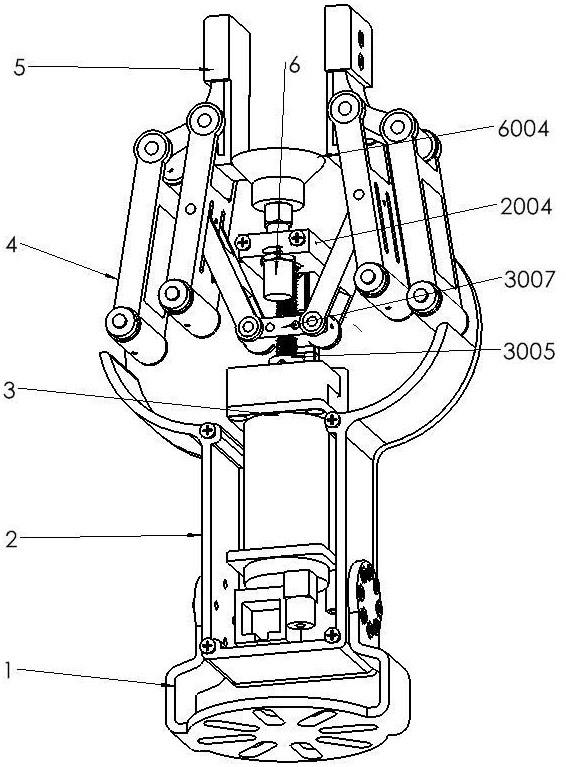
2、本实用新型提供一种可抓吸多物品的机器人夹爪,包括多功能法兰、夹爪壳体、驱动模块、爪指、爪指套和气动模块;所述多功能法兰下端机械连接夹爪壳体;所述夹爪壳体内部机械连接驱动模块;所述驱动模块内部通过丝杆螺母机械连接爪指,并由丝杆螺母前后运动带动爪指夹紧和松开物品;所述爪指末端块机械连接爪指套;所述气动模块机械连接夹爪壳体。
3、本实用新型进一步的完善是:所述多功能法兰上端有八个长条槽孔,方便安装于不同型号的机器人,下端两边均有8个螺纹孔,方便夹爪可以以45度角的倍数安装于机器人末端上。
4、本实用新型进一步的完善是:所述的一种可抓吸多物品的机器人夹爪,其特征在于:所述夹爪壳体包括下底板、中间连接块、上盖板、末端连接块。
5、本实用新型进一步的完善是:所述驱动模块包括信号线、电机固定块、电机、联轴器固定块、联轴器、丝杆、丝杆螺母、滑块、导轨和丝杆固定块。
6、本实用新型进一步的完善是:所述驱动模块中电机转动,通过联轴器带动丝杆转动,丝杆转动带动丝杆螺母前后滑动;所述丝杆螺母机械连接滑块,滑块在导轨上会和丝杆螺母一样前后滑动,所述导轨机械连接下底板。
7、本实用新型进一步的完善是:所述爪指包括拉杆、销钉、内连杆、轴承、外连杆、爪指末端块。
8、本实用新型进一步的完善是:所述爪指套包括平型爪指套,三角形爪指套和斜角形爪指套,根据物品的形状大小选择不同的爪指套。
9、本实用新型进一步的完善是:所述气动模块包括进气接头、连接管、气管接头、吸盘;气管接头和吸盘机械安装于末端连接块上。
10、本实用新型进一步的完善是:所述吸盘包括小吸盘,双层吸盘和大吸盘,根据不易抓取物品的特性和大小选择不同的吸盘。
11、本实用新型的有益效果:本实用新型提供多功能法兰,上端有八个槽口,使得夹爪可以安装于不同型号的机器人末端上,避免针对不同的机器人购买不同的夹爪,由于不同的机器人末端连接孔孔距不一样。下端有8个连接孔,使得夹爪可以以45度角的倍数安装于机器人末端,避免机器人在特殊位置抓取出现奇异姿态,提升抓取场景的适用性,部分场景将夹爪以90度角安装于机器人末端更容易抓取物品。通过设置可简单拆卸的爪指套,使得机器人夹爪可以夹取不同大小的多边形,圆形和其他特殊形状物品。通过设置可简单拆卸的吸盘,使得机器人夹爪可以吸取不易抓取的袋装和容易抓坏的盒装物品。同时对于比较重的特殊物品,可以抓取结合的形式转移物体,保证物体不容易掉下。本实用新型保证单个机器人夹爪的多样性,可以极大的降低购买多个机器人夹爪的成本。本实用新型具有较大的应用和推广空间。
技术特征:
1.一种可抓吸多物品的机器人夹爪,其特征在于:包括多功能法兰(1)、夹爪壳体(2)、驱动模块(3)、爪指(4)、爪指套(5)和气动模块(6);所述多功能法兰(1)下端机械连接夹爪壳体(2);所述夹爪壳体(2)内部机械连接驱动模块(3);所述驱动模块(3)内部通过丝杆螺母(3007)机械连接爪指(4),并由丝杆螺母(3007)前后运动带动爪指(4)夹紧和松开物品;所述爪指(4)末端爪指末端块(4006)机械连接爪指套(5);所述气动模块(6)机械连接夹爪壳体(2)。
2.根据权利要求1所述的一种可抓吸多物品的机器人夹爪,其特征在于:所述多功能法兰(1)上端有八个长条槽孔,方便安装于不同型号的机器人末端上,下端两边均有8个螺纹孔,方便机器人夹爪可以以45度角的倍数安装于机器人末端上。
3.根据权利要求1所述的一种可抓吸多物品的机器人夹爪,其特征在于:所述夹爪壳体(2)包括下底板(2001)、中间连接块(2002)、上盖板(2003)、末端连接块(2004)。
4.根据权利要求1所述的一种可抓吸多物品的机器人夹爪,其特征在于:所述驱动模块(3)包括信号线(3001)、电机固定块(3002)、电机(3003)、联轴器固定块(3004)、联轴器(3005)、丝杆(3006)、丝杆螺母(3007)、滑块(3008)、导轨(3009)和丝杆固定块(3010)。
5.根据权利要求1所述的一种可抓吸多物品的机器人夹爪,其特征在于:所述驱动模块(3)中电机(3003)转动,通过联轴器(3005)带动丝杆(3006)转动,丝杆(3006)转动带动丝杆螺母(3007)前后滑动;所述丝杆螺母(3007)机械连接滑块(3008),滑块(3008)在导轨(3009)上会和丝杆螺母(3007)一样前后滑动,所述导轨(3009)机械连接下底板(2001)。
6.根据权利要求1所述的一种可抓吸多物品的机器人夹爪,其特征在于:所述爪指(4)包括拉杆(4001)、销钉(4002)、内连杆(4003)、轴承(4004)、外连杆(4005)、爪指末端块(4006)。
7.根据权利要求1所述的一种可抓吸多物品的机器人夹爪,其特征在于:所述爪指套(5)包括平型爪指套(5001),三角形爪指套(5002)和斜角形爪指套(5003),根据物品的形状大小选择不同的爪指套(5)。
8.根据权利要求1所述的一种可抓吸多物品的机器人夹爪,其特征在于:所述气动模块(6)包括进气接头(6001)、连接管(6002)、气管接头(6003)、吸盘(6004);气管接头(6003)和吸盘(6004)机械安装于末端连接块(2004)上。
9.根据权利要求8所述的一种可抓吸多物品的机器人夹爪,其特征在于:所述吸盘(6004)包括小吸盘(60041),双层吸盘(60042)和大吸盘(60043),根据不易抓取物品的特性和大小选择不同的吸盘(6004)。
技术总结
本技术涉及一种可抓吸多物品的机器人夹爪,其特征包括多功能法兰、夹爪壳体、驱动模块、爪指、爪指套和气动模块。驱动模块中的丝杆螺母两侧连接爪指,通过丝杆螺母前后滑动带动爪指夹紧和松开物品。爪指末端块安装爪指套,夹爪壳体末端安装吸盘,中间通过连接管输气。本技术通过设置易拆卸的三种爪指套,根据抓取物的形状大选择不同的爪指套;而且设置易拆卸的三组吸盘,对于袋装或者易抓坏的物品,则采用三种不同的吸盘吸取,同时对于特殊物品,则采用先吸取再抓取的形式。同时机器人夹爪的多功能法兰可以多角度的安装于不同型号的机器人上,解决部分场景需要机器人夹爪多角度安装问题,同时降低不同机器人购买多夹爪的成本。
技术研发人员:艾胜,陈燚涛
受保护的技术使用者:艾胜
技术研发日:20230331
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!