一种自适应被抓取物外形欠驱动机械夹爪
本技术涉及机械工程领域,尤其涉及一种自适应被抓取物外形的欠驱动机械夹爪。
背景技术:
1、随着机械工程领域机械夹爪的不断发展,国内外对各种专用机械夹爪的研究也不断深入。但是专用机械夹爪通用性和灵活性不强,具体体现在,专用机械夹爪是针对特定场景和操作对象而设计,脱离特定场景和操作对象后,难以有效发挥抓取功能。尤其在抓取与设计时设定的特定操作对象外形、体积不同的被抓取物情况下,专用机械夹爪对被抓取物外形的自适应性较差,由此导致其难以有效发挥抓取功能。因此,设计一种能够自适应不同外形被抓取物的机械夹爪,提高通用性和灵活性,就显得尤为重要。
技术实现思路
1、为弥补上述现有技术的不足,本实用新型提供了一种自适应被抓取物外形的欠驱动机械夹爪,以解决上述背景技术中的问题,实现对不同外形抓取物的形状自适应。
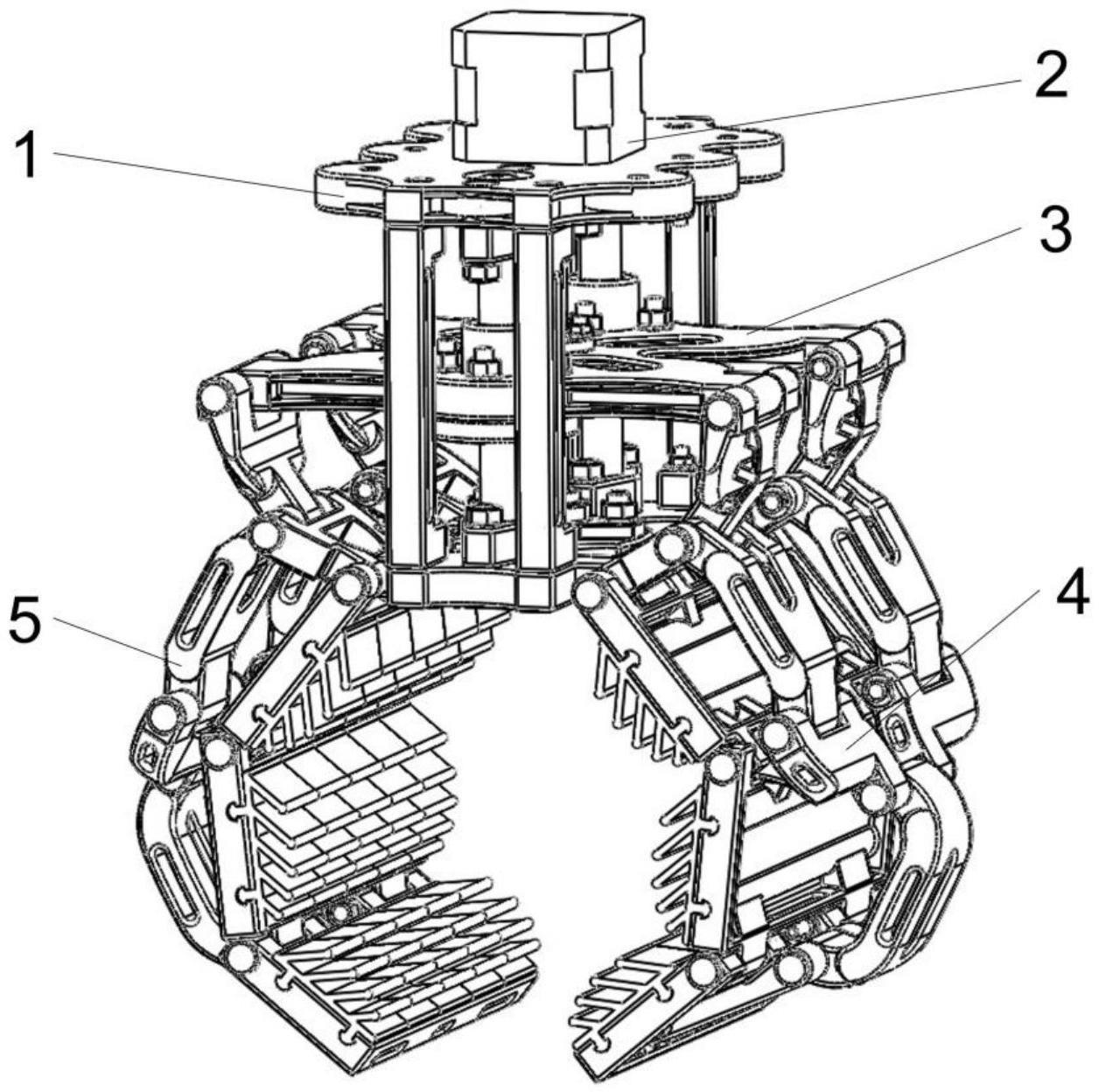
2、为实现上述目的,本实用新型提供了一种自适应被抓取物外形的欠驱动机械夹爪,其特征在于,包括基座、步进电机、传动架、第一手指、第二手指、工业机械臂末端连接件。其中,基座包括上底板和下底板,以及支撑柱;传动架包括直线轴承和丝杠螺母;第一手指和第二手指是结构完全相同的欠驱动手指,包括手指输入指骨、近指节输入指骨、近指节中间指骨、近指节工作指骨、近中指节连接指骨、中指节中间指骨、中指节工作指骨、远指节工作指骨、近指节工作指骨柔性垫层、中指节工作指骨柔性垫层、远指节工作指骨柔性垫层、第一至第八销轴。所述机械夹爪采用丝杠螺母传动机构。
3、进一步地,所述基座上底板设有电机安装孔、支撑柱安装孔、光轴固定座安装孔、机械臂末端连接件安装孔;所述步进电机通过所述步进电机安装孔,采用螺纹连接安装在所述基座上底板;所述支撑柱,通过支撑柱安装孔,采用螺纹连接与所述基座上底板固定连接;所述光轴固定座,通过光轴固定座安装孔,采用螺纹连接安装在所述基座上底板;所述基座上底板,通过连接件安装孔,采用螺纹连接安装工业机械臂末端连接件。
4、进一步地,所述基座下底板设有丝杠支撑轴承安装孔、支撑柱安装孔和光轴固定座安装孔;所述丝杠支撑轴承,通过所述丝杠支撑轴承安装孔,采用螺纹连接安装在所述基座下底板;所述支撑柱,通过支撑柱安装孔,采用螺纹连接与所述基座下底板固定连接;所述光轴固定座,通过光轴固定座安装孔,采用螺纹连接安装在所述基座下底板。
5、进一步地,所述传动架设有直线轴承安装孔和丝杠螺母安装孔,所述直线轴承通过直线轴承安装孔,采用螺纹连接安装在传动架上;所述丝杠螺母通过丝杠螺母安装孔,采用螺纹连接安装在传动架上。
6、进一步地,所述第一手指和第二手指中,所述第一销轴用于连接所述手指输入指骨和所述传动架;所述第二销轴用于连接所述基座下底板、所述近指节输入指骨和所述近指节工作指骨;所述第三销轴用于连接所述手指输入指骨、所述近指节输入指骨和所述近指节中间指骨;所述第四销轴用于连接所述近指节工作指骨、所述近中指节连接指骨和所述中指节工作指骨;所述第五销轴用于连接所述近指节中间指骨、所述近中指节连接指骨;所述第六销轴用于连接所述近中指节连接指骨、所述中指节中间指骨;所述第七销轴用于连接所述中指节工作指骨、所述远指节工作指骨;所述第八销轴用于连接所述中指节中间指骨、所述远指节工作指骨;所述近指节工作指骨柔性垫层、中指节工作指骨柔性垫层、远指节工作指骨柔性垫层,通过过盈配合安装于近指节工作指骨、中指节工作指骨、远指节工作指骨。
7、进一步地,当所述第一手指、第二手指抓取物体,在各指节工作指骨柔性垫层未与物体发生接触时,第一手指、第二手指按照自由运动方式运动,当指节工作指骨柔性垫层与物体发生接触,柔性垫层通过变形自适应被抓取物外形,对应指节失去自由运动状态,其余指节运动状态不受影响。
8、在本实用新型较佳实施方案中,在抓取物体时,当中指节工作指骨柔性垫层接触到物体并发生最大变形后,步进电机通过带动传动架继续直线移动,进而使第一手指和第二手指继续发生闭合。在闭合过程中,远指节工作指骨柔性垫层与被抓取物体接触并发生最大变形后,在中指节工作指骨柔性垫层和远指节工作指骨柔性垫层共同作用下,被抓取物体发生向基座下底板一侧方向的位移,近指节工作指骨柔性垫层、基座下底板先后与物体发生接触,实现对被抓取物外形的自适应抓取。
9、在本实用新型另一较佳实施方案中,在抓取物体时,基座下底板首先与物体发生接触,步进电机通过带动传动架继续直线移动,进而使第一手指和第二手指继续发生闭合。在闭合过程中,近指节工作指骨柔性垫层、中指节工作指骨柔性垫层、远指节工作指骨柔性垫层先后与被抓取物体发生接触,柔性垫层通过被动变形自适应被抓取物外形,在达到最大变形后,被抓取物体发生向基座下底板一侧方向的位移,实现对被抓取物体的抓取。
技术特征:
1.一种自适应被抓取物外形欠驱动机械夹爪,包括基座、步进电机、传动架、第一手指、第二手指、工业机械臂末端连接件,其特征在于:
技术总结
本技术公开了一种自适应被抓取物外形欠驱动机械夹爪,涉及机械工程领域,包括基座、步进电机、传动架、第一手指、第二手指、工业机械臂末端连接件。其中,基座包括上底板和下底板,以及支撑柱;传动架包括直线轴承和丝杠螺母;第一手指和第二手指是结构完全相同的欠驱动手指,包括手指输入指骨、近指节输入指骨、近指节中间指骨、近指节工作指骨、近中指节连接指骨、中指节中间指骨、中指节工作指骨、远指节工作指骨、近指节工作指骨柔性垫层、中指节工作指骨柔性垫层、远指节工作指骨柔性垫层、第一至第八销轴。本技术是一种自适应被抓取物外形的欠驱动机械夹爪,能够稳定抓取不同大小和外形形状的物体,采用步进电机驱动源、丝杠螺母传动机构,具有结构紧凑、经济成本低、适用性和实用性强的特点。
技术研发人员:李守忠,赵剑龙,马冲,姜雄,张文龙,匡新宇
受保护的技术使用者:中国农业大学
技术研发日:20230403
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!