一种机器人视觉测量定位装置的制作方法
本技术涉及机器人视觉测量定位领域,尤其涉及一种机器人视觉测量定位装置。
背景技术:
1、在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发视觉技术在机器人视觉、航空测绘、军事运用、医学成像和工业检测等领域中具有重要的作用。立体视觉主要是通过对相机进行标定,将图像中的信息转化为空间中的三维信息。立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的非接触产品检测和质量控制,利用立体视觉技术重构场景三维几何信息已经成为一个重要研究课题,现有的视觉测量装置难以实现移动测量,所以在受一定环境的影响下采集的质量不高,因此特此提出一种机器人视觉测量定位装置。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种机器人视觉测量定位装置,通过在主梁底端设置有受力板,电动伸缩杆等可通过控制面板来控制每一测量定位箱与被测量的工件的距离,因需要测量的工件大小不一,所受的环境影响也不同若不进行调位采集那所收集的数据将质量较差通过四个测量定位箱的调位采集数据可让操作者采集到最优数据,在测量定位箱长时间工作时内部元器件将发热若不布置散热装置,内部将会出现高温损坏的情况出现,因此每个测量定位箱的一侧固定设置有两个散热风扇达到散热的目的放置机器损害产生危害。
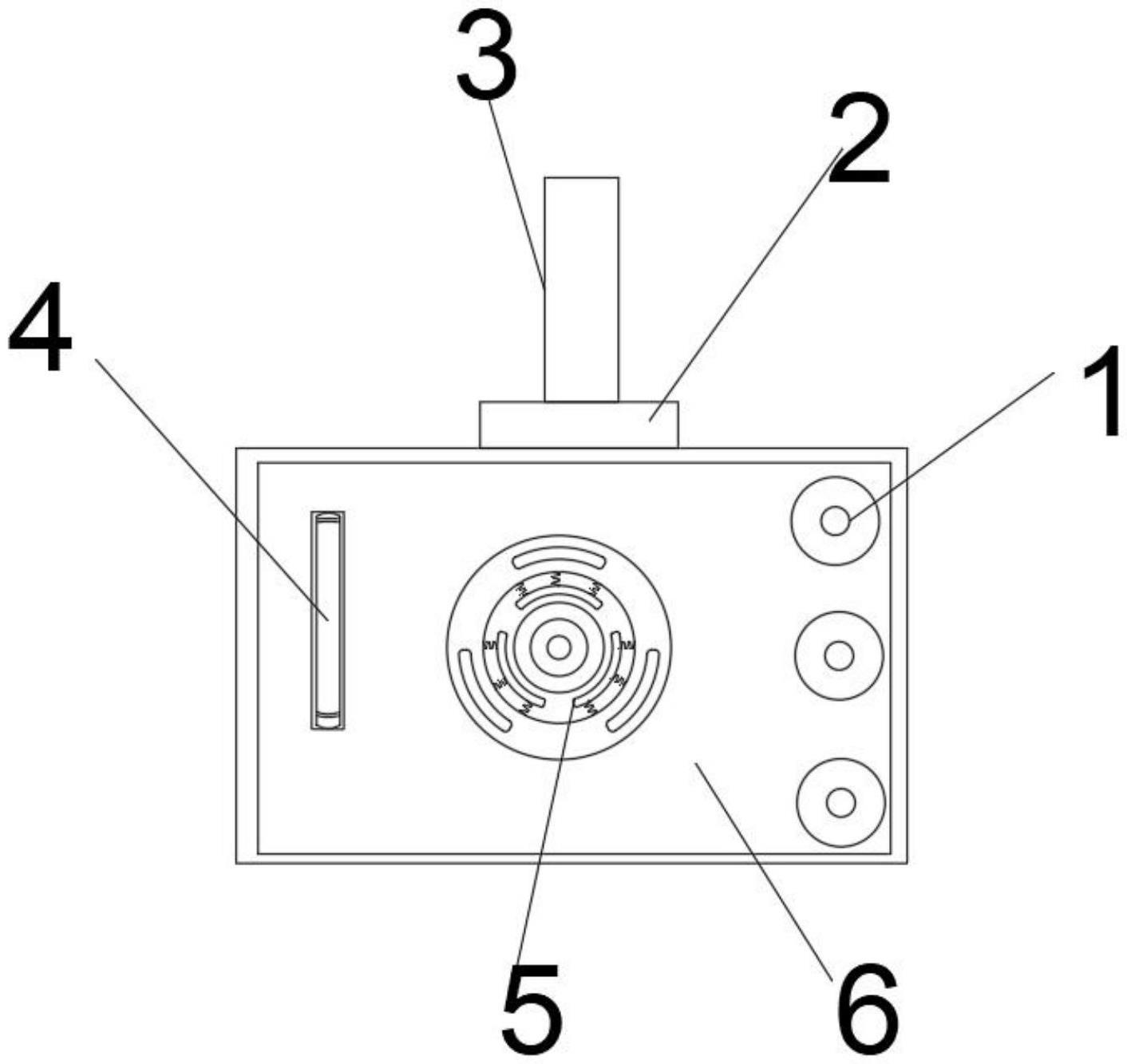
2、为实现上述目的,本实用新型提供了如下技术方案:包括主梁,所述主梁的底端均固定设置有四个受力板,四个所述受力板的一侧均固定设置有电动伸缩杆,四个所述电动伸缩杆远离受力板的一侧均固定设置有第二连接板,所述四个第二连接板的一侧固定设置有测量定位箱,四个所述第二连接板的一侧均固定设置有两个散热风扇,四个所述测量定位箱的远离第二连接板的一侧均固定设置有照明灯,四个所述照明灯的一侧均固定设置有视觉检测装置,四个所述视觉检测装置远离照明灯的一侧均固定设置有三个红外发射孔。
3、进一步地,四个所述测量定位箱的顶端均固定设置有第一连接板,四个所述第一连接板的顶端均固定设置有第一连杆,四个所述第一连杆的顶端均固定设置有第三连接板;
4、通过上述技术方案,连杆和连接块的布置使得在受力时连接块将会分解部分拉力,因连接块的接触面积较大。
5、进一步地,四个所述第三连接板的两个均固定设置有第二连接块,每个所述第二连接块的底端均转动设置有第二连杆,每个所述第二连杆的一侧均转动设置有滚轮;
6、通过上述技术方案,滚轮等零件的设置使得此设备可以更好的位移,可采集质量极佳的数据。
7、进一步地,每个所述第二连杆的表面中部均固定设置有弹簧连杆,每个所述弹簧连杆的顶端均转动设置有第一连接块;
8、通过上述技术方案,弹簧连杆的设置使得当装置移动时不会出现卡死现象的发生。
9、进一步地,所述主梁的内部开设有卡槽;
10、通过上述技术方案,移动部件在卡槽内移动,卡槽的设置使得移动的装置不会掉落。
11、进一步地,所述主梁的一侧底端固定设置有第三连杆;
12、通过上述技术方案,第三连杆的设置可为下面的设备提供一定量的拉力。
13、进一步地,所述第三连杆的底端固定设置有控制面板;
14、通过上述技术方案,控制面板可操控此装置的全部功能开关和行程。
15、进一步地,所述主梁的顶端中部固定设置有连接套筒;
16、通过上述技术方案,套筒的设置为安装被测量主体。
17、本实用新型具有如下有益效果:
18、1、本实用新型提出的一种机器人视觉测量定位装置,通过在主梁底端设置有受力板,电动伸缩杆等可通过控制面板来控制每一测量定位箱与被测量的工件的距离,因需要测量的工件大小不一,所受的环境影响也不同若不进行调位采集那所收集的数据将质量较差通过四个测量定位箱的调位采集数据可让操作者采集到最优数据。
19、2、本实用新型提出的一种机器人视觉测量定位装置,在测量定位箱长时间工作时内部元器件将发热若不布置散热装置,内部将会出现高温损坏的情况出现,因此每个测量定位箱的一侧固定设置有两个散热风扇达到散热的目的放置机器损害产生危害。
技术特征:
1.一种机器人视觉测量定位装置,包括主梁(21),其特征在于:所述主梁(21)的底端均固定设置有四个受力板(11),四个所述受力板(11)的一侧均固定设置有电动伸缩杆(10),四个所述电动伸缩杆(10)远离受力板(11)的一侧均固定设置有第二连接板(7),四个所述第二连接板(7)的一侧固定设置有测量定位箱(6),四个所述第二连接板(7)的一侧均固定设置有两个散热风扇(8),四个所述测量定位箱(6)的远离第二连接板(7)的一侧均固定设置有照明灯(4),四个所述照明灯(4)的一侧均固定设置有视觉检测装置(5),四个所述视觉检测装置(5)远离照明灯(4)的一侧均固定设置有三个红外发射孔(1)。
2.根据权利要求1所述的一种机器人视觉测量定位装置,其特征在于:四个所述测量定位箱(6)的顶端均固定设置有第一连接板(2),四个所述第一连接板(2)的顶端均固定设置有第一连杆(3),四个所述第一连杆(3)的顶端均固定设置有第三连接板(9)。
3.根据权利要求2所述的一种机器人视觉测量定位装置,其特征在于:四个所述第三连接板(9)的两个均固定设置有第二连接块(15),每个所述第二连接块(15)的底端均转动设置有第二连杆(16),每个所述第二连杆(16)的一侧均转动设置有滚轮(12)。
4.根据权利要求3所述的一种机器人视觉测量定位装置,其特征在于:每个所述第二连杆(16)的表面中部均固定设置有弹簧连杆(14),每个所述弹簧连杆(14)的顶端均转动设置有第一连接块(13)。
5.根据权利要求1所述的一种机器人视觉测量定位装置,其特征在于:所述主梁(21)的内部开设有卡槽(17)。
6.根据权利要求1所述的一种机器人视觉测量定位装置,其特征在于:所述主梁(21)的一侧底端固定设置有第三连杆(19)。
7.根据权利要求6所述的一种机器人视觉测量定位装置,其特征在于:所述第三连杆(19)的底端固定设置有控制面板(18)。
8.根据权利要求1所述的一种机器人视觉测量定位装置,其特征在于:所述主梁(21)的顶端中部固定设置有连接套筒(20)。
技术总结
本技术涉及机器人视觉测量定位领域,公开了一种机器人视觉测量定位装置,包括主梁,所述主梁的底端均固定设置有四个受力板,四个所述受力板的一侧均固定设置有电动伸缩杆,四个所述电动伸缩杆远离受力板的一侧均固定设置有第二连接板,所述四个第二连接板的一侧固定设置有测量定位箱,四个所述第二连接板的一侧均固定设置有两个散热风扇。本技术中,通过在主梁底端设置有受力板,电动伸缩杆等可通过控制面板来控制每一测量定位箱与被测量的工件的距离,因需要测量的工件大小不一,所受的环境影响也不同若不进行调位采集那所收集的数据将质量较差通过四个测量定位箱的调位采集数据可让操作者采集到最优数据。
技术研发人员:陈平
受保护的技术使用者:易曼德(天津)智能科技有限公司
技术研发日:20230413
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!