机器人手臂控制机构的制作方法
本技术涉及机械手配件,具体为一种机器人手臂控制机构。
背景技术:
1、机械手(或称机器人)是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
2、在进行一些精准度要求较高的加工作业时,机械手需要保持稳定状态,特别是机械手上安装的加工工具(比如刀具、磨具)与被加工件接触时的稳定程度(表现在加工工具的移动行程产生偏差),当接触时不稳定时,容易造成加工精度下降,甚至造成被加工件报废,进而影响加工效率和成本,因此需要一种能够精确控制机械手移动的控制机构。
技术实现思路
1、本实用新型要解决的技术问题是克服现有技术的缺陷,提供一种机器人手臂控制机构,为了解决上述提到的技术问题,本实用新型提供了如下的技术方案:
2、本实用新型提供了:一种机器人手臂控制机构,包括:
3、用于连接机器人手臂及加工工具的,且能够伸缩移动的连接部;
4、用于驱动所述连接部的伸缩部分移动的气缸;
5、用于对所述气缸进气压力进行控制的比例阀;
6、用于检测所述连接部的伸缩部分移动行程的位移传感器。
7、优选地,所述连接部包括:
8、与机器人手臂连接的底座法兰;
9、安装在所述底座法兰上的底座;
10、可拆卸连接在所述底座上的固定支架,所述固定支架外轮廓成u形,且其水平部位与所述底座连接,所述气缸竖直地安装在固定支架的水平部位上,所述比例阀安装在固定支架上;
11、直线滑动连接在所述固定支架上的伸缩支架,所述伸缩支架外轮廓成u形,其两侧的竖直段分别与所述固定支架的两个竖直部位连接;
12、可拆卸连接在所述伸缩支架水平段上的工具连接法兰。
13、优选地,所述固定支架的两个竖直部位上各竖直安装有导轨,所述伸缩支架的两个竖直段上各安装有滑块,所述滑块与导轨配合使用,使得所述伸缩支架滑动连接在固定支架上。
14、优选地,所述固定支架上安装有用于控制气缸动作的电磁阀。
15、优选地,所述固定支架上安装有姿态传感器。
16、优选地,所述伸缩支架的水平段上可拆卸连接有连接块,所述连接块上设有一连接轴,所述连接轴与气缸的气缸杆螺纹连接。
17、优选地,所述固定支架上安装有集成控制模块,所述集成控制模块用于采集位移传感器、电磁阀和姿态传感器的信号。
18、优选地,所述伸缩支架与底座之间共同连接有防护外壳。
19、与现有技术相比,本实用新型的有益效果是:
20、通过设置比例阀,进而对气缸的进气压力进行精准控制,减少气缸的动作行程误差,使得机械手在重复操作时的精准度得到提升;
21、通过设置位移传感器,能够实时检测气缸的动作行程,进而可对加工工具的加工进给量进行检测;
22、通过设置固定支架、伸缩支架,伸缩支架滑动连接在固定支架上,再通过气缸来驱动伸缩支架移动,结构简单,可靠性高;
23、通过设置姿态传感器,能够检测加工工具在进行加工过程中的姿态,进而辅以位移传感器的位移检测,从而能够监测机械手的稳定状态。
技术特征:
1.一种机器人手臂控制机构,其特征在于,包括:
2.如权利要求1所述的一种机器人手臂控制机构,其特征在于,所述连接部包括:
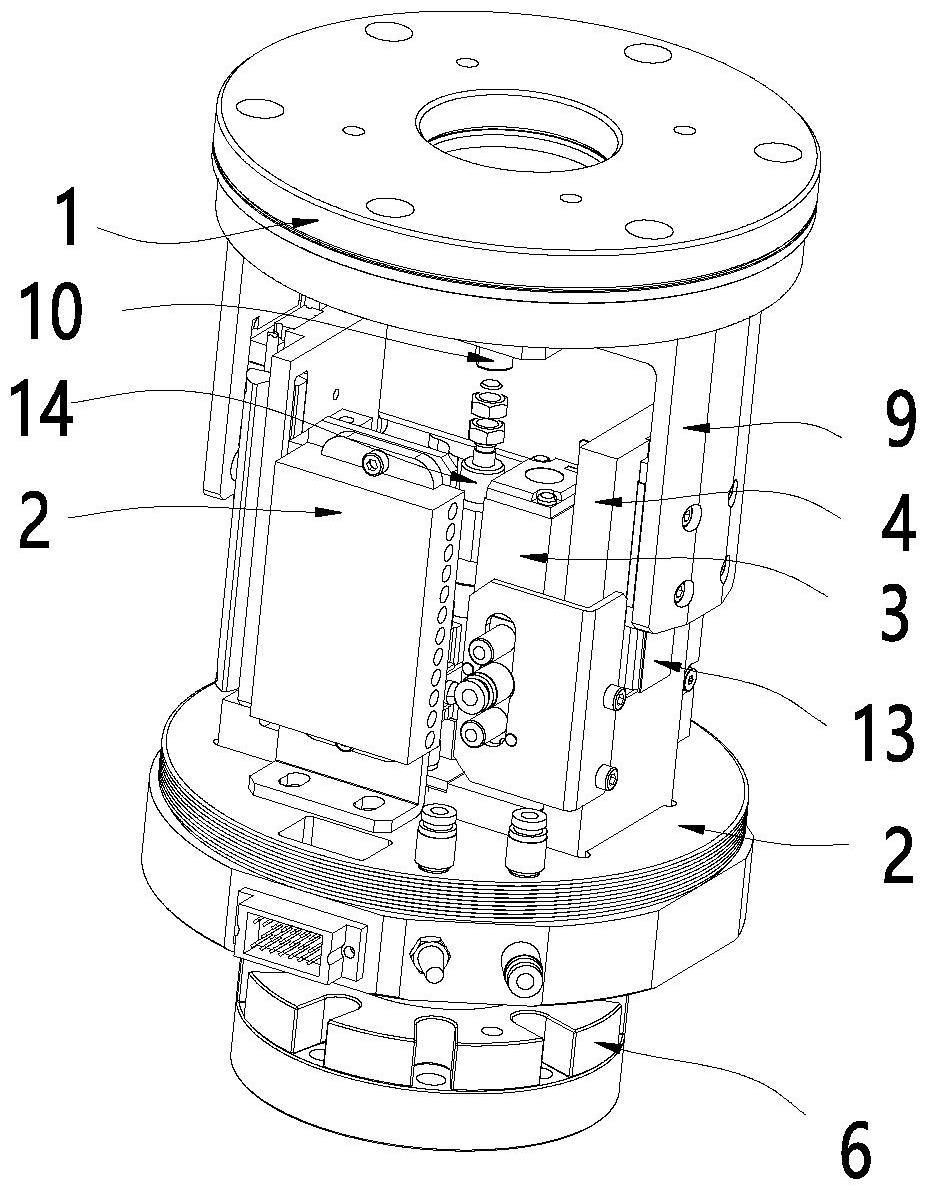
3.如权利要求2所述的一种机器人手臂控制机构,其特征在于,所述固定支架(4)的两个竖直部位上各竖直安装有导轨(13),所述伸缩支架(9)的两个竖直段上各安装有滑块(12),所述滑块(12)与导轨(13)配合使用,使得所述伸缩支架(9)滑动连接在固定支架(4)上。
4.如权利要求3所述的一种机器人手臂控制机构,其特征在于,所述固定支架(4)上安装有用于控制气缸(14)动作的电磁阀(3)。
5.如权利要求4所述的一种机器人手臂控制机构,其特征在于,所述固定支架(4)上安装有姿态传感器(8)。
6.如权利要求5所述的一种机器人手臂控制机构,其特征在于,所述伸缩支架(9)的水平段上可拆卸连接有连接块(11),所述连接块(11)上设有一连接轴(10),所述连接轴(10)与气缸(14)的气缸杆螺纹连接。
7.如权利要求6所述的一种机器人手臂控制机构,其特征在于,所述固定支架(4)上安装有集成控制模块(2),所述集成控制模块(2)用于采集位移传感器(15)、电磁阀(3)和姿态传感器(8)的信号。
8.如权利要求7所述的一种机器人手臂控制机构,其特征在于,所述伸缩支架(9)与底座(5)之间共同连接有防护外壳。
技术总结
本技术公开了机械手配件技术领域的一种机器人手臂控制机构,包括用于连接机器人手臂及加工工具的,且能够伸缩移动的连接部;用于驱动所述连接部的伸缩部分移动的气缸;用于对所述气缸进气压力进行控制的比例阀;用于检测所述连接部的伸缩部分移动行程的位移传感器。通过设置比例阀,进而对气缸的进气压力进行精准控制,减少气缸的动作行程误差,使得机械手在重复操作时的精准度得到提升;通过设置位移传感器,能够实时检测气缸的动作行程,进而可对加工工具的加工进给量进行检测;通过设置固定支架、伸缩支架,伸缩支架滑动连接在固定支架上,再通过气缸来驱动伸缩支架移动,结构简单,可靠性高。
技术研发人员:李振海,邵帅
受保护的技术使用者:无锡斯帝尔科技有限公司
技术研发日:20230417
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!