机械抱臂及晶圆测试设备的制作方法
本技术涉及半导体测试,尤其是涉及一种机械抱臂及晶圆测试设备。
背景技术:
1、晶圆测试是半导体器件后道封装测试的第一步,目的是在封装前把不合格的芯片筛选出来,确保芯片上的每个小方格能基本满足器件的特征或设计规格书。后道封装测试通常包括电压、电流、时序和功能的验证,以节省封装的成本,同时可以更直接的知道晶圆的良率。
2、测试机工作时需要放置在探针台的上方,安装在测试机上的母板需要精确的与探针台的针卡盘对接。在测试前需要通过机械臂在六个自由度方向调整测试机的位置,而往往机械臂的重量较大,调节难度大,并不便于人员调节。另外,由于芯片测试种类不同,需要使用不同的测试机进行测试,传统机械臂与不同测试机连接,需要更换大量的零部件,安装通用性较差。
技术实现思路
1、本实用新型的目的在于提供一种机械抱臂及晶圆测试设备,机械抱臂可在多个自由度调整测试机的位置,减少了主机械臂本身自由度的调节,调节更加简单方便,同时可通过调节安装平面的位置、角度来适配更多类型的测试机,安装通用性更强。
2、为实现上述目的,本实用新型提供以下技术方案:
3、第一方面,本实用新型提供一种机械抱臂,包括抱臂本体、限位结构以及用于安装测试机的调节结构;
4、所述抱臂本体用于与主机械臂连接;
5、所述调节结构沿x向与所述抱臂本体滑动配合,所述调节结构具有用于与所述测试机接触贴合的安装平面,所述安装平面沿y向可调以及以x向、y向和z向为轴角度可调,所述x向、所述y向和所述z向两两垂直;
6、所述限位结构用于调节所述调节结构相对于所述抱臂本体在所述x向上的位置。
7、进一步地,所述限位结构包括沿x向位于所述调节结构两侧的固定块以及与所述固定块螺纹连接的第一螺钉,所述固定块安装于所述抱臂本体上,所述第一螺钉贯穿所述固定块与所述调节结构的侧壁抵接。
8、进一步地,所述调节结构包括球型轴承以及安装于所述球型轴承内圈的衬套座;
9、所述球型轴承用于以所述x向、所述y向和所述z向为轴调整所述衬套座的角度,所述安装平面相对于所述衬套座沿所述y向可调。
10、进一步地,所述调节结构包括调节组件和安装件;
11、所述球型轴承安装于所述调节组件上,所述调节组件沿所述x向与所述抱臂本体滑动配合;
12、所述安装件沿所述y向可相对于所述衬套座滑动,所述安装件至少部分伸入至所述抱臂本体内,所述安装平面形成于所述安装件位于所述抱臂本体内的一端。
13、进一步地,所述调节组件包括限位件以及依次连接的固定罩、调节板和滑移板;
14、所述滑移板沿x向与所述抱臂本体的内表面滑动配合,所述球型轴承安装于所述滑移板上;
15、所述调节板正对所述抱臂本体的外表面,所述调节板开设有通孔,所述安装件贯穿所述通孔延伸至所述固定罩内;
16、所述限位件伸入所述固定罩并与所述固定罩活动连接,所述限位件用于限定所述安装件沿所述y向的位置以及以所述x向和所述z向为轴时的转动角度。
17、进一步地,所述限位件包括第二螺钉以及多个第三螺钉;
18、所述第二螺钉与所述固定罩螺纹配合并沿所述y向伸入所述固定罩内,以限定所述安装件沿所述y向的位置;
19、各个所述第三螺钉与所述固定罩螺纹配合并伸入所述固定罩内,各个所述第三螺钉围绕所述y向分布,以限定所述安装件以所述x向和所述z向为轴时的转动角度。
20、进一步地,所述调节板上设有摩擦片,所述摩擦片与所述抱臂本体的外表面接触,以增加所述调节板与所述抱臂本体的摩擦。
21、进一步地,所述抱臂本体包括前臂以及分别连接于所述前臂两侧的两个侧臂,每一个所述侧臂上均连接有限位结构并滑动连接有所述调节结构。
22、进一步地,所述前臂以及两个所述侧臂上均安装有用于对所述测试机限位缓冲的缓冲凸起。
23、第二方面,本实用新型还提供一种晶圆测试设备,包括主机械臂、测试机、探针台以及上述方案所述的机械抱臂,所述机械抱臂安装于所述主机械臂上,所述测试机安装于所述机械抱臂上,所述探针台与所述主机械臂固定连接。
24、本实用新型提供的机械抱臂及晶圆测试设备能产生如下有益效果:
25、本实用新型提供的机械抱臂中,测试机可以安装于限位结构上通过限位结构来固定自身的位置。在将测试机与机械抱臂对接时,可沿x向将调节结构滑动至合适的位置并通过限位结构锁定调节结构的位置,还可以通过调节结构自身的结构来调整安装平面沿y向的位置以及以x、y、z方向为轴的转动角度。
26、相对于现有技术来说,本实用新型第一方面提供的机械抱臂通过限位结构以及调节结构能够实现安装平面的x向、y向的位置调节,还能够实现以x向、y向和z向为轴的角度调节,赋予了机械抱臂多个自由度的调节功能,减少了主机械臂本身自由度的调节,调节更加简单方便。同时,可通过调节安装平面的位置、角度来适配更多类型的测试机,安装通用性更强。
27、本实用新型第二方面提供的晶圆测试设备有本实用新型第一方面提供的机械抱臂,从而具有本实用新型第一方面提供的机械抱臂所具有的一切有益效果。
技术特征:
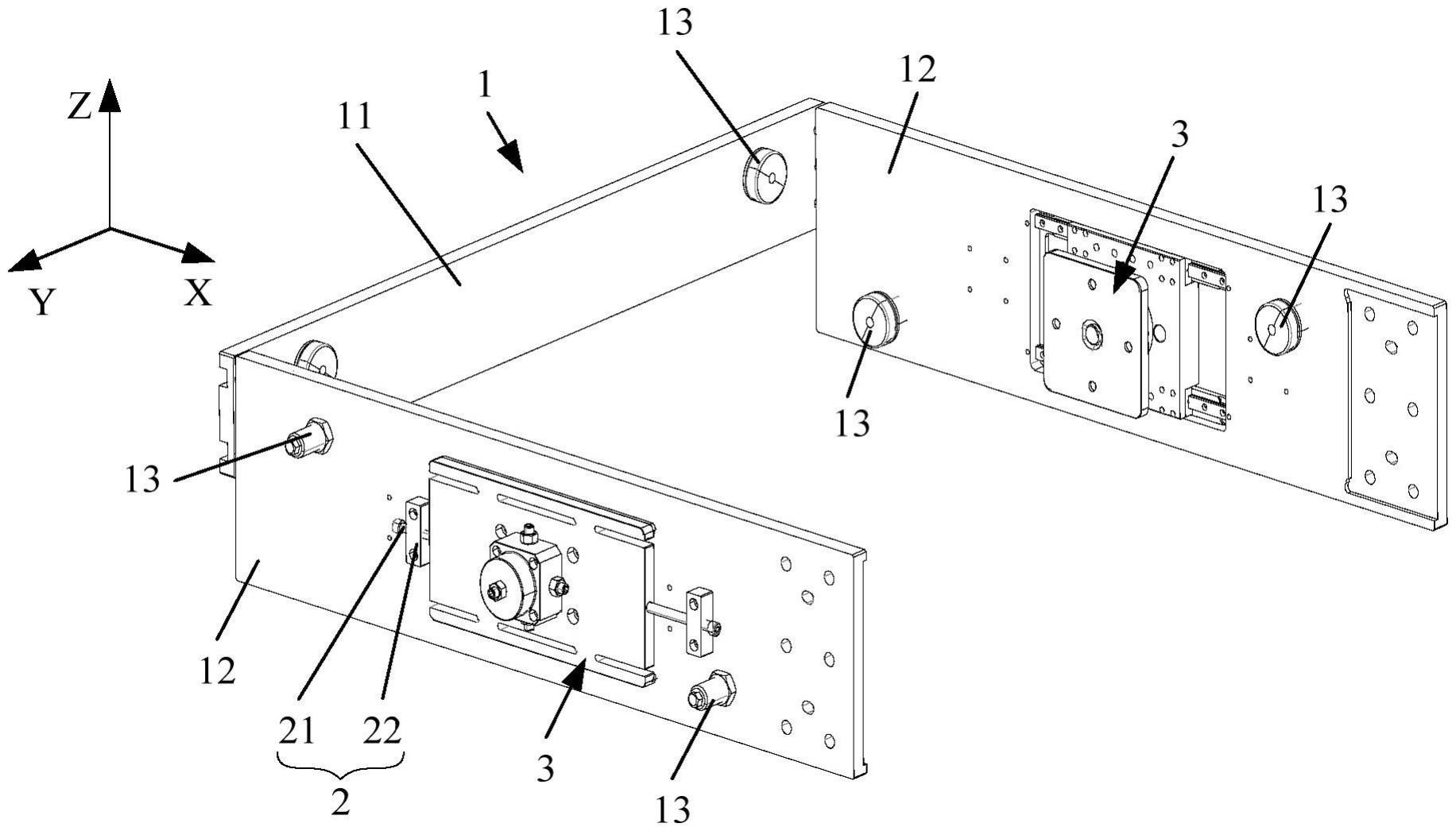
1.一种机械抱臂,其特征在于,包括抱臂本体(1)、限位结构(2)以及用于安装测试机(5)的调节结构(3);
2.根据权利要求1所述的机械抱臂,其特征在于,所述限位结构(2)包括沿x向位于所述调节结构(3)两侧的固定块(21)以及与所述固定块(21)螺纹连接的第一螺钉(22),所述固定块(21)安装于所述抱臂本体(1)上,所述第一螺钉(22)贯穿所述固定块(21)与所述调节结构(3)的侧壁抵接。
3.根据权利要求1所述的机械抱臂,其特征在于,所述调节结构(3)包括球型轴承(3141)以及安装于所述球型轴承(3141)内圈的衬套座(3142);
4.根据权利要求3所述的机械抱臂,其特征在于,所述调节结构(3)包括调节组件(31)和安装件(32);
5.根据权利要求4所述的机械抱臂,其特征在于,所述调节组件(31)包括限位件(311)以及依次连接的固定罩(312)、调节板(313)和滑移板(314);
6.根据权利要求5所述的机械抱臂,其特征在于,所述限位件(311)包括第二螺钉(3111)以及多个第三螺钉(3112);
7.根据权利要求5所述的机械抱臂,其特征在于,所述调节板(313)上设有摩擦片(315),所述摩擦片(315)与所述抱臂本体(1)的外表面接触,以增加所述调节板(313)与所述抱臂本体(1)的摩擦。
8.根据权利要求1所述的机械抱臂,其特征在于,所述抱臂本体(1)包括前臂(11)以及分别连接于所述前臂(11)两侧的两个侧臂(12),每一个所述侧臂(12)上均连接有限位结构(2)并滑动连接有所述调节结构(3)。
9.根据权利要求8所述的机械抱臂,其特征在于,所述前臂(11)以及两个所述侧臂(12)上均安装有用于对所述测试机(5)限位缓冲的缓冲凸起(13)。
10.一种晶圆测试设备,其特征在于,包括主机械臂(4)、测试机(5)、探针台(6)以及如权利要求1-9任一项所述的机械抱臂,所述机械抱臂安装于所述主机械臂(4)上,所述测试机(5)安装于所述机械抱臂上,所述探针台(6)与所述主机械臂(4)固定连接。
技术总结
本技术提供了一种机械抱臂及晶圆测试设备,涉及半导体测试技术领域,本技术提供的机械抱臂包括抱臂本体、限位结构以及用于安装测试机的调节结构;抱臂本体用于与主机械臂连接;调节结构沿X向与抱臂本体滑动配合,调节结构具有用于与测试机接触贴合的安装平面,安装平面沿Y向可调以及以X向、Y向和Z向为轴角度可调,X向、Y向和Z向两两垂直;限位结构用于调节调节结构相对于抱臂本体在X向上的位置。本技术提供的机械抱臂可在多个自由度调整测试机的位置,减少了主机械臂本身自由度的调节,调节更加简单方便,同时可通过调节安装平面的位置、角度来适配更多类型的测试机,安装通用性更强。
技术研发人员:程高飞,杨奎
受保护的技术使用者:长川科技(内江)有限公司
技术研发日:20230423
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!