一种工业机器人最大操作范围限位装置
本技术涉及机器人限位装置,特别涉及一种工业机器人最大操作范围限位装置。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人被广泛应用于电子、物流、化工等各个工业领域之中;
2、工业机器人在通过预先设定的程序自动运行时,会根据设定的转动幅度以及关节动作来对加工的物品进行操作,而控制工业机器人的程序由代码编辑而成,因此,在工业机器人的使用过程中,无论时程序的紊乱还是硬件方面的损害,均有可能使得工业机器人出现超出设定范围动作,如工业机器人会出现关节乱动以及转动方向不受控制,且部分生产工位内还会安排有人工进行辅助生产,因此,如工业机器人的转动幅度超出设定范围,则有可能造成人员的伤害。
技术实现思路
1、本实用新型的目的在于提供一种工业机器人最大操作范围限位装置,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
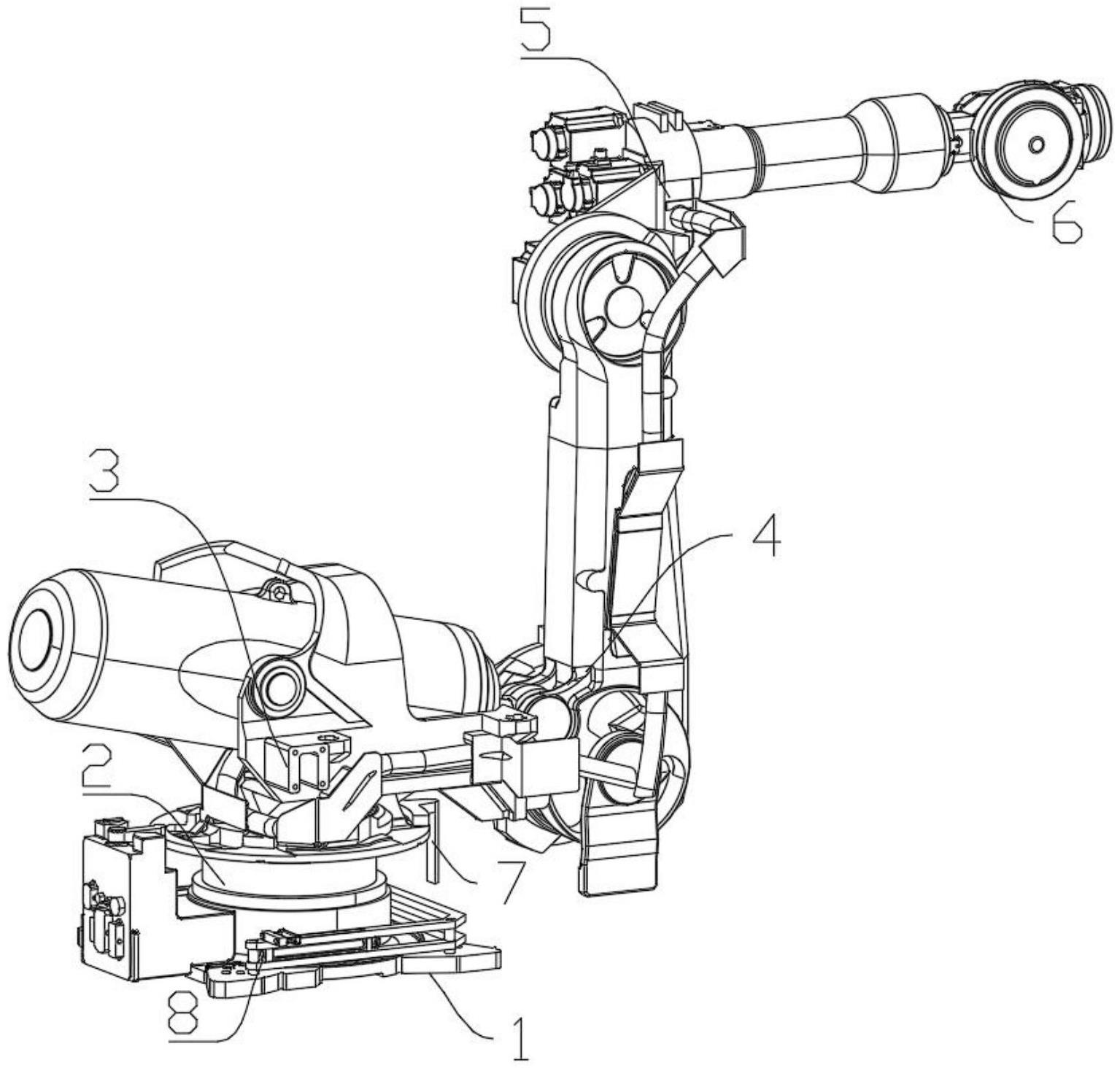
3、一种工业机器人最大操作范围限位装置,包括底座,所述底座上端固定安装有基座,所述基座上端活动安装有转台,所述转台一端活动安装有大臂,所述大臂远离转台的一端活动安装有小臂,所述小臂远离大臂的一端活动安装有连接端;所述转台前端固定安装有第一限位杆,位于所述基座外侧位置的底座上设有限位机构,所述限位机构包括下安装杆与上安装杆,所述下安装杆与上安装杆通过多个连接柱固定连接,且所述下安装杆固定安装在底座上,所述下安装杆与上安装杆之间活动安装有两个调节螺杆,所述下安装杆与上安装杆之间还活动安装有两个滑杆。
4、作为本实用新型的进一步优选方案,所述连接柱内开设有第一安装孔,且所述下安装杆与上安装杆通过连接柱内的第一安装孔穿插安装在底座上的固定螺栓上。
5、作为本实用新型的进一步优选方案,所述下安装杆上两侧均开设有滑槽,位于所述滑槽上方位置的上安装杆开设有滑口,位于所述滑槽一侧的下安装杆与上安装杆之间还固定连接有固定块,所述固定块内开设有第二安装孔。
6、作为本实用新型的进一步优选方案,所述调节螺杆一端固定安装有旋钮块,所述调节螺杆一端转动安装在第二安装孔内,且位于所述固定块两侧位置的调节螺杆上分别螺纹连接有螺帽。
7、作为本实用新型的进一步优选方案,所述滑杆内开设有螺孔,所述滑杆上端固定安装有顶杆,所述顶杆内开设有两个第三安装孔,所述顶杆一侧活动安装有第二限位杆,所述滑杆下端穿过滑口滑动安装在滑槽内,且所述螺孔与调节螺杆螺纹连接。
8、作为本实用新型的进一步优选方案,所述第二限位杆相对于顶杆一侧固定安装有两个销轴,所述销轴穿插安装在对应的第三安装孔内,且位于所述顶杆一侧的销轴上螺纹连接有螺帽,位于所述第二限位杆与顶杆之间的销轴上套装有压缩弹簧。
9、与现有技术相比,本实用新型具有如下有益效果:
10、本实用新型所述的一种工业机器人最大操作范围限位装置,在底座上安装下安装杆与上安装杆,并通过滑杆上的顶杆与第二限位杆能够对第一限位杆进行限位,从而对转台最大的转动幅度进行限位,同时,利用调节螺杆可对滑杆的位置进行调节,进而调整转台转动时的限位幅度。
技术特征:
1.一种工业机器人最大操作范围限位装置,包括底座(1),所述底座(1)上端固定安装有基座(2),所述基座(2)上端活动安装有转台(3),所述转台(3)一端活动安装有大臂(4),所述大臂(4)远离转台(3)的一端活动安装有小臂(5),所述小臂(5)远离大臂(4)的一端活动安装有连接端(6),其特征在于:所述转台(3)前端固定安装有第一限位杆(7),位于所述基座(2)外侧位置的底座(1)上设有限位机构(8),所述限位机构(8)包括下安装杆(9)与上安装杆(10),所述下安装杆(9)与上安装杆(10)通过多个连接柱(13)固定连接,且所述下安装杆(9)固定安装在底座(1)上,所述下安装杆(9)与上安装杆(10)之间活动安装有两个调节螺杆(11),所述下安装杆(9)与上安装杆(10)之间还活动安装有两个滑杆(12)。
2.根据权利要求1所述的一种工业机器人最大操作范围限位装置,其特征在于:所述连接柱(13)内开设有第一安装孔(14),且所述下安装杆(9)与上安装杆(10)通过连接柱(13)内的第一安装孔(14)穿插安装在底座(1)上的固定螺栓上。
3.根据权利要求2所述的一种工业机器人最大操作范围限位装置,其特征在于:所述下安装杆(9)上两侧均开设有滑槽(16),位于所述滑槽(16)上方位置的上安装杆(10)开设有滑口(15),位于所述滑槽(16)一侧的下安装杆(9)与上安装杆(10)之间还固定连接有固定块(17),所述固定块(17)内开设有第二安装孔(18)。
4.根据权利要求3所述的一种工业机器人最大操作范围限位装置,其特征在于:所述调节螺杆(11)一端固定安装有旋钮块(19),所述调节螺杆(11)一端转动安装在第二安装孔(18)内,且位于所述固定块(17)两侧位置的调节螺杆(11)上分别螺纹连接有螺帽。
5.根据权利要求4所述的一种工业机器人最大操作范围限位装置,其特征在于:所述滑杆(12)内开设有螺孔(20),所述滑杆(12)上端固定安装有顶杆(21),所述顶杆(21)内开设有两个第三安装孔(22),所述顶杆(21)一侧活动安装有第二限位杆(23),所述滑杆(12)下端穿过滑口(15)滑动安装在滑槽(16)内,且所述螺孔(20)与调节螺杆(11)螺纹连接。
6.根据权利要求5所述的一种工业机器人最大操作范围限位装置,其特征在于:所述第二限位杆(23)相对于顶杆(21)一侧固定安装有两个销轴(24),所述销轴(24)穿插安装在对应的第三安装孔(22)内,且位于所述顶杆(21)一侧的销轴(24)上螺纹连接有螺帽,位于所述第二限位杆(23)与顶杆(21)之间的销轴(24)上套装有压缩弹簧(25)。
技术总结
本技术公开了一种工业机器人最大操作范围限位装置,涉及机器人限位装置技术领域,包括底座,底座上端固定安装有基座,基座上端活动安装有转台,转台一端活动安装有大臂,大臂远离转台的一端活动安装有小臂,小臂远离大臂的一端活动安装有连接端,转台前端固定安装有第一限位杆,位于基座外侧位置的底座上设有限位机构,限位机构包括下安装杆与上安装杆,下安装杆与上安装杆通过多个连接柱。在底座上安装下安装杆与上安装杆,并通过滑杆上的顶杆与第二限位杆能够对第一限位杆进行限位,从而对转台最大的转动幅度进行限位,同时,利用调节螺杆可对滑杆的位置进行调节,进而调整转台转动时的限位幅度。
技术研发人员:陈超然,郑起航,黄东,邓勇,林惠标,谢志刚,魏协奔,陈明忠
受保护的技术使用者:汕头职业技术学院
技术研发日:20230427
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!