工件搬运装置的制作方法
本技术涉及工件定位搬运领域,尤其涉及一种工件搬运装置。
背景技术:
1、在制造过程中,需要在制程设备内或制程设备之间搬运电芯体,以有效完成该电芯体的多工序加工。
技术实现思路
1、本实用新型实施例的目的之一在于提供一种工件搬运装置,应用该装置可以放方便地对工件进行定位搬运。
2、本实用新型实施例提供的一种工件搬运装置,包括:
3、底座,
4、固定平台,固定在所述底座上,用于固定工件,
5、固定座,固定在所述底座上,位于所述固定平台侧,
6、中心作用块,安装在所述固定座的顶面,可垂直升降,
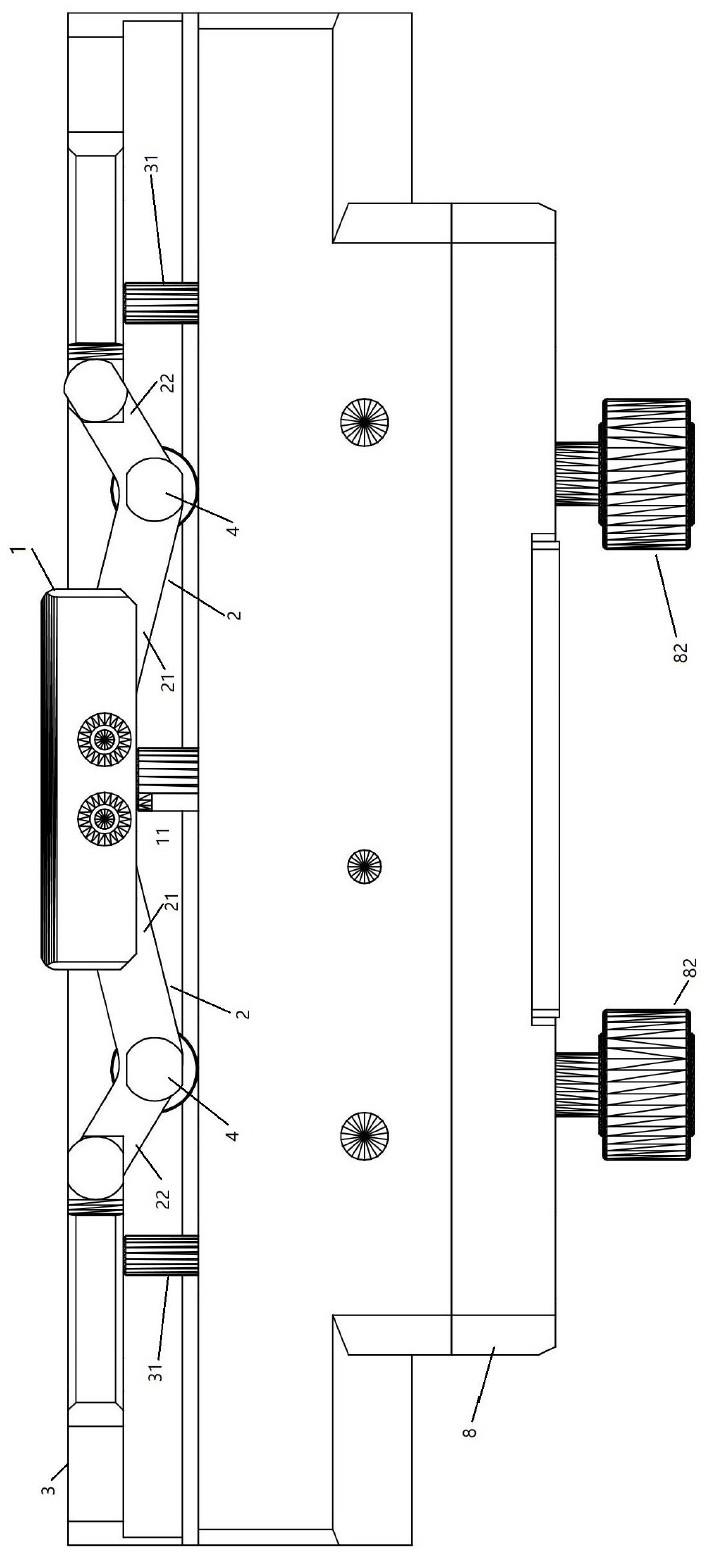
7、两刚性的传动关节,各所述传动关节包括第一臂、第二臂,所述第一臂、第二臂形成一大于0小于180度的夹角,记所述第一臂、第二臂的相交部位为关节位,两所述传动关节的所述第一臂的末端朝上,一左一右地铰连接在所述中心作用块的两侧,两所述传动关节的所述第二臂的末端朝上,一左一右地铰连接在一可升降的压块的两端,所述压块的部分位于所述固定平台的顶面的上方,各所述传动关节分别可沿各所述第一臂与所述中心作用块的铰接部、各所述第二臂与所述压块的铰连接部在垂直平面内旋转,在各所述传动关节的所述关节位处分别铰连接有一水平固定轴,各所述传动关节分别可沿其各所述水平固定轴在垂直平面内旋转,所述水平固定轴与各铰连接部位的枢转轴平行,与两所述传动关节垂直。
8、可选地,在所述底座的底部设置有复数个支撑脚。
9、可选地,在底座的底部还设置有与外部运送机构相匹配的定位部,以将所述夹持机构固定在外部运送机构上。
10、可选地,所述中心作用块的底部设有一顶柱,所述顶柱的下端从所述固定座的第一导向孔的顶部开口伸入且与所述第一导向孔内的第一弹簧连接,在无外力作用时,所述第一弹簧对所述顶柱有向上的弹力。
11、可选地,所述顶柱与所述第一弹簧的顶部连接,所述第一弹簧的底端固定在所述第一导向孔内。
12、可选地,在所述固定座上设有第二导向孔,
13、在所述压块上设有导向轴,各所述导向轴的下端分别从各所述第二导向孔的顶部开口伸入,所述导向轴的下端可在所述第二导向孔内升降运动。
14、可选地,所述导向轴还与所述第二导向孔内的弹簧连接,在无外力作用时,所述弹簧对所述导向轴有向下的弹力。
15、可选地,在无外力作用时,在重力及弹力作用下,所述中心作用块、压块力平衡时分别保持在预定位置使夹持机构处于夹持状态。
16、可选地,两所述传动关节水平镜像对称分布。
17、可选地,在所述固定座上设置有至少两所述第二导向孔,在所述压块上设有分别与各所述第二导向孔对应的至少两导向轴。
18、可选地,各所述第二导向孔、导向轴水平镜像对称分布。
19、可选地,在所述中心作用块上设有水平导向槽,水平导向槽分布于所述顶柱的左右两侧,
20、两所述第一臂与所述中心作用块之间的两铰连接部的两枢转轴的其中之一限位在左侧的所述水平导向槽内,另一限位在右侧的所述水平导向槽内,各所述枢转轴分别可沿该所述枢转轴所在的所述水平导向槽左右平移。
21、可选地,
22、所述第一臂、第二臂形成的夹角为钝角。
23、可选地,所述压块的部分伸出在所述固定平台的顶面的上方,
24、所述压块位于所述固定平台外的部位与两所述传动关节铰连接。
25、可选地,当所述中心作用块下降时,所述中心作用块带动两所述第二臂的末端下降,两所述第二臂的末端上升,所述压块上升,所述压块与所述固定平台的顶面之间的距离增大,
26、当所述中心作用块上升时,所述中心作用块带动两所述第二臂的末端上升,使两所述第二臂的末端下降,所述压块下降,所述压块与所述固定平台的顶面之间的距离缩小。
27、可选地,所述固定座紧贴所述固定平台的端面为垂直端面,所述垂直端面高于所述固定平台的顶面。
28、可选地,所述压块包括相互垂直的水平端板及垂直端板,
29、所述垂直端板位于所述固定座的垂直端面外,位于所述固定平台的顶面的上方,
30、所述水平端板安装在所述固定的顶部。
31、可选地,在所述压块的水平端板的中部设有挖空段,
32、所述中心作用块、两所述传动关节位于所述固定座露出于所述挖空段的顶部,两所述第二臂与所述挖空段左右两侧的所述水平端板铰连接。
33、可选地,在所述水平端板上设置有数量大于所述导向轴的数量的复数个导向轴安装孔,各所述导向轴分别安装在各所述导向轴安装孔内。
34、可选地,在所述固定平台的顶面设有复数个定位部,以定位工件在顶面的边沿。
35、由上可见,采用本实施例的工件搬运装置,在进行工件搬运是,利用其上的夹持结构对工件进行夹持,避免工件移位,能够实现工件的定位搬运,有利于提高工效。其中工件夹持机构的工作原理是,控制中心作用块的升降带动两刚性的传动关节在垂直平台内旋转,传动关节进而带动压块升降,可以实现压块对工件的松开及夹持。另外,本实施例的两传动关节的两第二臂分别一左一右地作用于压块,从压块3的左右两边带动压块升降,有利于提高压块的升降平稳度,提高压块对工件的夹持力的均衡度,提高夹持效果,提高装置搬运过程中对工件的定位效果,避免移位。
技术特征:
1.一种工件搬运装置,其特征是,包括:
2.根据权利要求1所述的工件搬运装置,其特征是,
3.根据权利要求1所述的工件搬运装置,其特征是,
4.根据权利要求1所述的工件搬运装置,其特征是,
5.根据权利要求4所述的工件搬运装置,其特征是,
6.根据权利要求1所述的工件搬运装置,其特征是,
7.根据权利要求6所述的工件搬运装置,其特征是,
8.根据权利要求4至7之任一所述的工件搬运装置,其特征是,
9.根据权利要求1所述的工件搬运装置,其特征是,
10.根据权利要求6所述的工件搬运装置,其特征是,
11.根据权利要求10所述的工件搬运装置,其特征是,
12.根据权利要求4所述的工件搬运装置,其特征是,
13.根据权利要求1所述的工件搬运装置,其特征是,
14.根据权利要求1所述的工件搬运装置,其特征是,
15.根据权利要求1所述的工件搬运装置,其特征是,
16.根据权利要求6所述的工件搬运装置,其特征是,
17.根据权利要求16所述的工件搬运装置,其特征是,
18.根据权利要求17所述的工件搬运装置,其特征是,
19.根据权利要求18所述的工件搬运装置,其特征是,
20.根据权利要求1所述的工件搬运装置,其特征是,
技术总结
本技术涉及工件定位搬运领域,公开了一种工件搬运装置。其包括底座,固定平台,固定在底座上,用于固定工件,固定座,固定在底座上,位于固定平台侧,中心作用块,安装在固定座的顶面,可垂直升降,两刚性的传动关节,各传动关节第一臂、第二臂形成一夹角,第一臂铰连接在中心作用块的两侧,第二臂铰连接在一可升降的压块的两端,压块的部分位于固定平台的顶面的上方,各传动关节分别可沿各第一臂与中心作用块的铰接部、各第二臂与压块的铰连接部在垂直平面内旋转,在各传动关节的关节位处分别铰连接有一水平固定轴,各传动关节分别可沿其各水平固定轴在垂直平面内旋转,水平固定轴与各铰连接部位的枢转轴平行,与两传动关节垂直。
技术研发人员:刘勇,殷振国
受保护的技术使用者:深圳市格瑞普电池有限公司
技术研发日:20230426
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!