一种采茶机器人
本技术涉及机器人,尤其涉及一种采茶机器人。
背景技术:
1、现有的采茶机器人包括穿戴机构、设置在穿戴机构上的连续体机械臂,以及位于连续体机械臂末端的抓取机构,使用采茶机器人进行采茶时,茶农在腰部佩戴箩筐,茶农通过穿戴机构将采茶机器人背在身上,然后连续体机械臂驱动抓取机构靠近茶树,抓取机构将茶树上的茶叶夹住后,连续体机械臂驱动抓取机构远离茶树,茶叶被采茶机器人摘下,然后连续体机械臂驱动抓取机构运动到箩筐的上方,抓取机构松开茶叶,以使茶叶掉入箩筐,至此完成一次采茶,循环往复进行不断采茶。
2、现有的采茶机器人的抓取机构每次摘下茶叶后都需要经过较长的路径回到箩筐将茶叶放入箩筐,然后在进行下一次采茶,在采茶的过程中,连续体机械臂需要不断往复运动,造成采茶效率低。
技术实现思路
1、本实用新型为了解决现有的采茶机器人采茶效率低的缺点,提出一种采茶机器人,在连续体机械臂末端设置存放桶,抓取机构摘下茶叶后,将茶叶放入存放桶内后即可继续采茶,减少连续体机械臂运动幅度,从而提高采茶效率。
2、为实现上述目的,本实用新型采用如下技术方案:
3、一种采茶机器人,包括穿戴机构、用于抓取茶叶的抓取机构、用于驱动抓取机构运动的连续体机械臂,采茶机器人还包括转动连接在连续体机械臂的末端的转动座、用于驱动转动座转动的第一电机,抓取机构设置在转动座上,转动座转动连接有支撑杆,支撑杆转动连接有连接板,连接板固定连接有存放桶,存放桶的桶口和连接板固定连接,以使存放桶的桶口始终向上,采茶机器人包括采茶状态和放茶状态;采茶机器人处于采茶状态时,存放桶位于抓取机构的上侧;采茶机器人处于放茶状态时,抓取机构位于存放桶的桶口的上侧,第一电机驱动转动座转动,以切换采茶机器人的状态。
4、本申请中,第一电机驱动转动座转动以切换采茶机器人的状态,当采茶机器人处于采茶状态时,存放桶位于抓取机构的上方,不会妨碍抓取机构采茶,抓取机构摘下茶叶后,第一电机使采茶机器人处于放茶状态,抓取机构将茶叶松开后,茶叶掉入存放桶,至此完成一次采茶;第一电机使采茶机器人重新回到采茶状态后即可继续进行采茶,本申请采茶的过程中,连续体机械臂运动幅度小,采茶效率高。
5、进一步的,抓取机构包括和转动座固定连接的底座、两个一端和底座转动连接的夹爪、用于驱动夹爪开合以对茶叶进行抓放的开合机构。
6、进一步的,其中一个夹爪靠近底座的一端固定连接有从动齿轮,其中一个夹爪靠近底座的一端固定连接有驱动齿轮,从动齿轮和驱动齿轮啮合,开合机构设置为可驱动驱动齿轮转动的第二电机。
7、进一步的,穿戴机构包括连接体、一端和连接体连接的第一腰带、一端和连接体连接的第二腰带、用于将第一腰带和第二腰带连接在一起的卡扣,连续体机械臂设置在连接体上。
8、进一步的,抓取机构和支撑杆位于转动座的轴线的相对两侧。
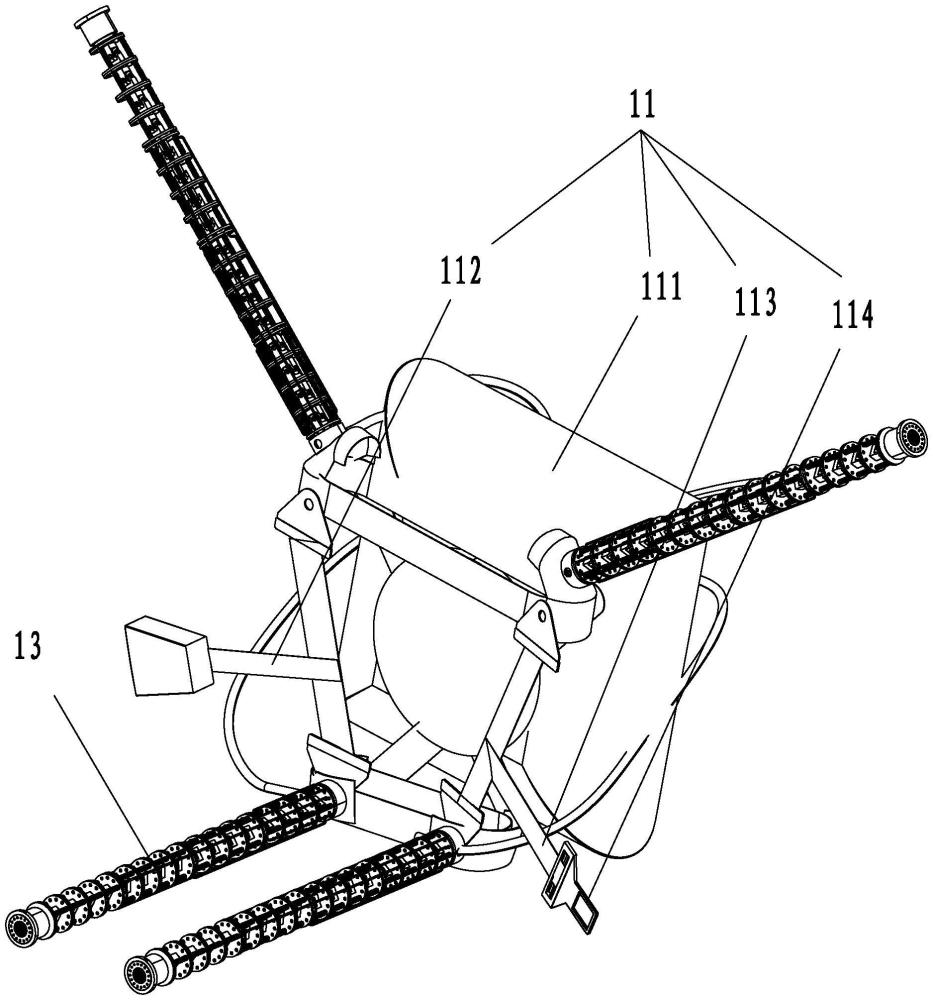
9、进一步的,连续体机械臂的数量至少为三个。
10、进一步的,连续体机械臂的数量为四个。
技术特征:
1.一种采茶机器人,包括穿戴机构、用于抓取茶叶的抓取机构、用于驱动所述抓取机构运动的连续体机械臂,其特征在于,所述采茶机器人还包括转动连接在所述连续体机械臂的末端的转动座、用于驱动所述转动座转动的第一电机,所述抓取机构设置在所述转动座上,所述转动座转动连接有支撑杆,所述支撑杆转动连接有连接板,所述连接板固定连接有存放桶,所述存放桶的桶口和所述连接板固定连接,以使所述存放桶的桶口始终向上,所述采茶机器人包括采茶状态和放茶状态;
2.根据权利要求1所述的一种采茶机器人,其特征在于,所述抓取机构包括和所述转动座固定连接的底座、两个一端和所述底座转动连接的夹爪、用于驱动所述夹爪开合以对茶叶进行抓放的开合机构。
3.根据权利要求2所述的一种采茶机器人,其特征在于,其中一个所述夹爪靠近所述底座的一端固定连接有从动齿轮,其中一个所述夹爪靠近所述底座的一端固定连接有驱动齿轮,所述从动齿轮和所述驱动齿轮啮合,所述开合机构设置为可驱动所述驱动齿轮转动的第二电机。
4.根据权利要求1所述的一种采茶机器人,其特征在于,所述穿戴机构包括连接体、一端和所述连接体连接的第一腰带、一端和所述连接体连接的第二腰带、用于将所述第一腰带和所述第二腰带连接在一起的卡扣,所述连续体机械臂设置在所述连接体上。
5.根据权利要求1所述的一种采茶机器人,其特征在于,所述抓取机构和所述支撑杆位于所述转动座的轴线的相对两侧。
6.根据权利要求1所述的一种采茶机器人,其特征在于,所述连续体机械臂的数量至少为三个。
7.根据权利要求6所述的一种采茶机器人,其特征在于,所述连续体机械臂的数量为四个。
技术总结
本技术公开了一种采茶机器人,包括穿戴机构、用于抓取茶叶的抓取机构、用于驱动抓取机构运动的连续体机械臂,采茶机器人还包括转动连接在连续体机械臂的末端的转动座、用于驱动转动座转动的第一电机,抓取机构设置在转动座上,转动座转动连接有支撑杆,支撑杆转动连接有连接板,连接板固定连接有存放桶,存放桶的桶口和连接板固定连接。本技术提出一种采茶机器人,在连续体机械臂末端设置存放桶,抓取机构摘下茶叶后,将茶叶放入存放桶内后即可继续采茶,减少连续体机械臂运动幅度,从而提高采茶效率。
技术研发人员:史旭豪,白东明,阙献书,廉杰
受保护的技术使用者:金华职业技术学院
技术研发日:20230510
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!