一种六足排雷机器人
本技术涉及机器人,尤其涉及一种六足排雷机器人。
背景技术:
1、地雷是热兵器出现以后一种比较古老的装备,作为一种障碍性的装备,其在战争中一直发挥着巨大的作用。地雷发展到现在,种类非常繁多,包括反坦克地雷、反步兵地雷、松发雷、绊发雷、轨迹雷等多种地雷。对于进攻方来说,可能面对着各种各样地雷设置的障碍物,需要在进攻时付出很大的代价。地雷是战争的伤疤,它不会区分平民和士兵,当战火消散,人们终于迎来和平的曙光时,地雷仍然是潜在的危险。地雷的保质期可以长达几十年甚至上百年。1999年3月1日《渥太华禁雷公约》正式生效,不过让人类完全摆脱地雷的梦魇还任重道远。目前,仍有1亿多枚地雷埋藏在世界各个角落,它们大部分都还没有失效。另有2.5亿枚的地雷储存量,平均每年有250万枚新地雷被埋设,而平均每天有70人被地雷炸死或炸伤......机械除雷和炸药除雷虽然快捷,但是还不能保证百分百清除地雷,难免会有些漏网之鱼,而且有时可能会破坏房屋建筑,深山老林又不便于大型机械进入,这时人工排雷则成为无奈之选。人工排雷是最花时间也是最危险的方法,如果在战时,排雷工兵很容易被敌人狙击。
2、探雷是一个讲究方法、速度缓慢的过程,因为确定地雷位置时有很大危险。虽然定位技术在不断进步,但仍然容易造成人员伤亡。因此,为了降低排雷风险,减少人力和物力的损失,且加快排雷进度,排雷机器人是急需的且需求量较大的。由于排雷排爆作业以及地面环境的随机性要求,其作业装置具有良好的通过性能,以适应各种场合的需要。经调研,现今市面上存在的大部分排雷机器人采用的是履带式行进的方法,但这种机器人在雷区并不能很好的适用。因此,排雷机器人的行进方式还有待创新。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种六足排雷机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种六足排雷机器人,包括六足机器人和四自由度机械臂,所述六足机器人包括驱动模块、控制模块、数据采集模块;所述驱动模块包括腿部驱动模块和脚部驱动模块,所述脚部驱动模块包括脚垫、脚部支架、脚部结构模块、结构支撑柱和脚部运动舵机,所述结构支撑柱和脚部运动舵机设置在相邻两个脚部结构模块之间;
4、所述腿部驱动模块包括c字结构板、腿部运动舵机、十字大u、腿部摆动电机;
5、所述c字结构板用于连接脚部运动舵机和腿部运动舵机;所述十字大u连接腿部摆动电机和腿部运动电机;
6、所述六足机器人包括底板和顶板;所述腿部摆动电机一端位于底板和顶板之间,所述底板上方设置有主控板和可充电电池,所述顶板上方设置有舵机控制板,所述底板和顶板的四边均设有立板,所述底板和顶板的中央设有中央立柱,所述中央立柱的顶部安装两个四自由度机械臂平台;
7、所述控制模块和数据采集模块包括主控板、与主控板电性相连的扩展板,所述顶板上方前部设有双目视觉模块,所述立板的侧面设有红外传感器模块,所述底板的底部安装有与扩展板电性相连的金属探测模块、红外传感器模块、足端轨迹传感器、压力传感器、舵机模块、蓝牙模块、双目视觉模块;
8、所述腿部驱动模块和脚部驱动模块均设置为六组,其中四组腿部驱动模块与底板在四个角处连接,另二组腿部驱动模块与底板两端中央处连接,所述腿部摆动电机、腿部运动舵机、脚部运动舵机均设置为六组放置在六组腿部驱动模块中;
9、所述四自由度机械臂包括腰关节、肩关节、肘关节和腕关节四个可旋转关节;所述四自由度机械臂由机械臂底座、机械大臂、机械小臂、机械小臂和末端执行器构成;所述机械臂底座由腰部旋转大齿轮、腰部旋转小齿轮和旋转基座构成主体外壳结构;所述四自由度机械臂还包括第一联轴器;
10、所述旋转基座上设有液压缸,用于为腰关节、肩关节、肘关节和腕关节的旋转以及末端执行器的夹取提供动力;
11、所述腰关节上设有连接螺栓,用于执行旋转操作和连接机械大臂和腰部外壳;所述肩关节上设有第一螺栓,用于执行旋转操作和连接第一伺服电机和机械大臂;所述第一伺服电机连接第一螺栓和机械小臂,用于为肩关节旋转提供动力;所述机械小臂和机械小臂由肘关节连接;所述肘关节由第二伺服电机和第二联轴器构成,所述第二伺服电机为肘关节旋转提供动力,所述腕关节连接机械小臂和末端执行器,所述腕关节上设有第三联轴器和第三伺服电机,所述第三联轴器包含第三伺服电机,且第三伺服电机能为末端执行器的夹取和腕关节旋转提供动力,所述末端执行器由气缸、手爪臂、螺母、连杆、底部、连接杆和第三螺栓构成,所述气缸为手爪臂的夹取提供动力,所述连杆和螺母用于连接手爪臂和底部,所述连接杆用于连接底部和第三联轴器。
12、作为本实用新型再进一步的方案:所述主控板为arduino开发板。
13、作为本实用新型再进一步的方案:所述四自由度机械臂与六足机器人共用一块主控板。
14、作为本实用新型再进一步的方案:所述双目视觉模块设有摄像板,所述摄像板上设有双目摄像头,所述双目视觉模块的侧面设置有与扩展板电性相连的液晶显示模块。
15、作为本实用新型再进一步的方案:所述金属探测模块设有金属感应传感器,金属感应传感器的检测端垂直朝下指向地面。
16、作为本实用新型再进一步的方案:所述立板的侧面与红外传感器模块连接,所述顶板的顶部与蓝牙模块连接。
17、作为本实用新型再进一步的方案:所述顶板和底板均设有穿线孔,电路板之间的接线穿过穿线孔相连。
18、作为本实用新型再进一步的方案:所述脚部支架上设有足端轨迹传感器,通过外部接线和穿线孔和扩展板相连,且足端轨迹传感器实时回传脚部压力数据。
19、作为本实用新型再进一步的方案:所述气缸用于为末端执行器的夹取提供动力;末端执行器上设置有力传感模块,用于实时传送机械臂力的数据。
20、作为本实用新型再进一步的方案:所述肩关节、肘关节和腕关节分别由第一联轴器、第二联轴器和第三联轴器来执行连接功能;所述肩关节、肘关节和腕关节分别由第一伺服电机、第二伺服电机和第三伺服电机来提供旋转的动力;所述液压缸为四自由度机械臂提供动力。
21、本实用新型的有益效果为:基于arduino开发板,综合利用红外避障模块、舵机模块、超声波测距模块,可实现稳定可靠的智能避障功能,搭载摄像头实现多维度的环境探测功能,在主控板上连接扩展板,可支持后续的精密传感器、数据处理模块、网络通信模块等各种附加模块的集成工作,拥有极高的可扩展性,从而在功能上为不同需求者提供了更多的选择,有利于成本控制,模块化的组件便于非专业人员使用与维修,从而推动机器人的多场景普及工作,整体上具有设计合理、行动灵活、智能化程度高、环境探测能力强等特点,可助力于多场景环境排雷工作,有着极高的实用性和推广价值。
技术特征:
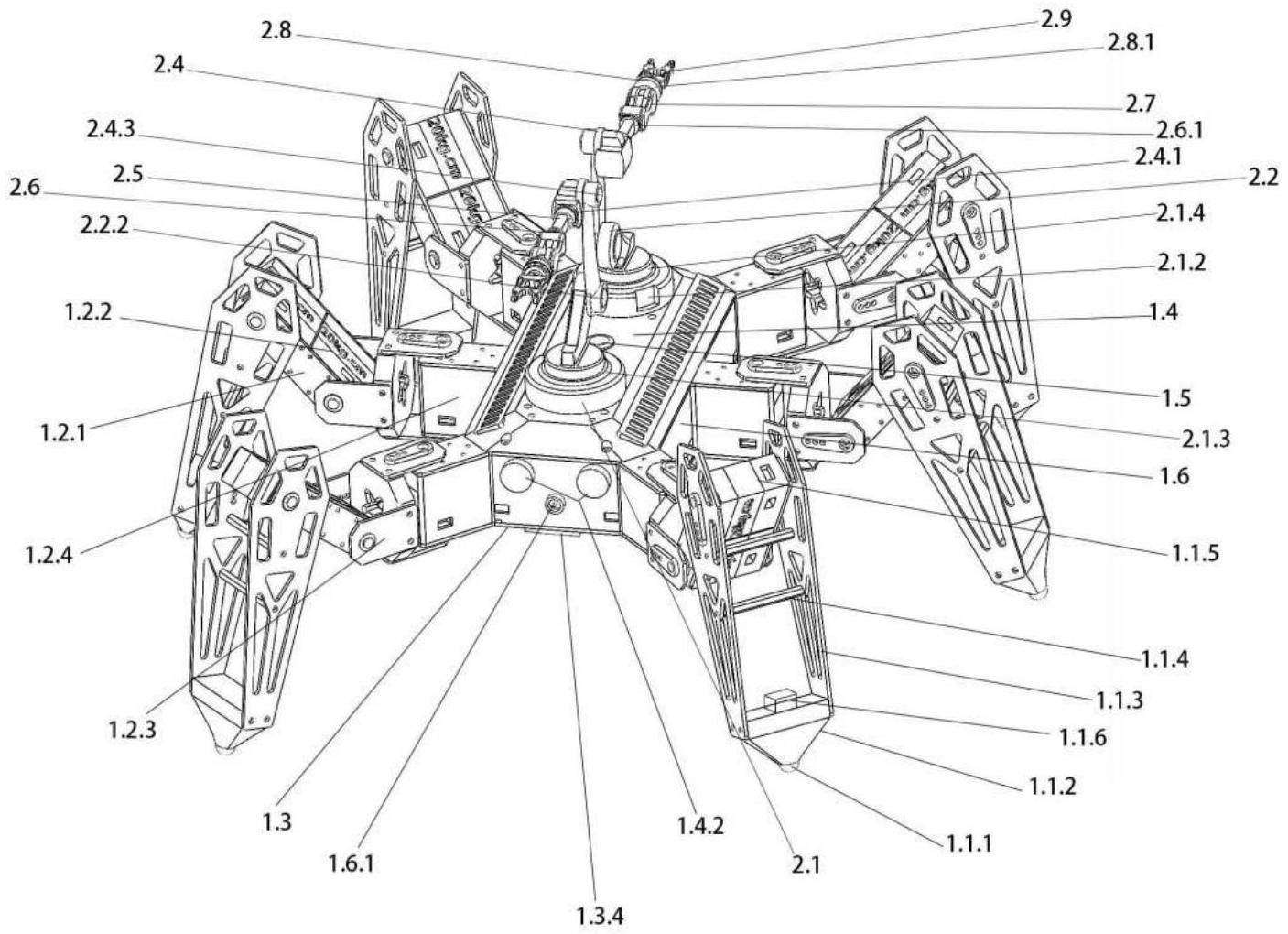
1.一种六足排雷机器人,其特征在于,包括六足机器人和四自由度机械臂,所述六足机器人包括驱动模块、控制模块、数据采集模块;所述驱动模块包括腿部驱动模块和脚部驱动模块,所述脚部驱动模块包括脚垫(1.1.1)、脚部支架(1.1.2)、脚部结构模块(1.1.3)、结构支撑柱(1.1.4)和脚部运动舵机(1.1.5),所述结构支撑柱(1.1.4)和脚部运动舵机(1.1.5)设置在相邻两个脚部结构模块(1.1.3)之间;
2.根据权利要求1所述的一种六足排雷机器人,其特征在于,所述主控板(1.3.1)为arduino开发板。
3.根据权利要求1所述的一种六足排雷机器人,其特征在于,所述四自由度机械臂与六足机器人共用一块主控板(1.3.1)。
4.根据权利要求1所述的一种六足排雷机器人,其特征在于,所述双目视觉模块(1.4.2)设有摄像板,所述摄像板上设有双目摄像头,所述双目视觉模块(1.4.2)的侧面设置有与扩展板(1.3.3)电性相连的液晶显示模块。
5.根据权利要求1所述的一种六足排雷机器人,其特征在于,所述金属探测模块(1.3.4)设有金属感应传感器,金属感应传感器的检测端垂直朝下指向地面。
6.根据权利要求1所述的一种六足排雷机器人,其特征在于,所述立板(1.6)的侧面与红外传感器模块(1.6.1)连接,所述顶板(1.4)的顶部与蓝牙模块(1.3.5)连接。
7.根据权利要求1所述的一种六足排雷机器人,其特征在于,所述顶板(1.4)和底板(1.3)均设有穿线孔,电路板之间的接线穿过穿线孔相连。
8.根据权利要求1所述的一种六足排雷机器人,其特征在于,所述脚部支架(1.1.2)上设有足端轨迹传感器(1.1.6),通过外部接线和穿线孔和扩展板(1.3.3)相连,且足端轨迹传感器(1.1.6)实时回传脚部压力数据。
9.根据权利要求1所述的一种六足排雷机器人,其特征在于,所述气缸(2.9.1)用于为末端执行器(2.9)的夹取提供动力;末端执行器(2.9)上设置有力传感模块,用于实时传送机械臂力的数据。
10.根据权利要求1所述的一种六足排雷机器人,其特征在于,所述肩关节(2.4)、肘关节(2.6)和腕关节(2.8)分别由第一联轴器(2.4.4)、第二联轴器(2.6.2)和第三联轴器(2.8.2)来执行连接功能;所述肩关节(2.4)、肘关节(2.6)和腕关节(2.8)分别由第一伺服电机(2.4.1)、第二伺服电机(2.6.1)和第三伺服电机(2.8.1)来提供旋转的动力;所述液压缸(2.1.4)为四自由度机械臂提供动力。
技术总结
本技术涉及机器人技术领域,公开了一种六足排雷机器人,包括六足机器人和四自由度机械臂,所述六足机器人包括驱动模块、控制模块、数据采集模块;所述驱动模块包括腿部驱动模块和脚部驱动模块,所述脚部驱动模块包括脚垫、脚部支架、脚部结构模块、结构支撑柱和脚部运动舵机,所述结构支撑柱和脚部运动舵机设置在相邻两个脚部结构模块之间;所述腿部驱动模块包括C字结构板、腿部运动舵机、十字大U、腿部摆动电机。本技术可实现稳定可靠的智能避障功能、环境探测功能,拥有极高的可扩展性,整体上具有设计合理、行动灵活、智能化程度高、环境探测能力强等特点,可助力于多场景环境排雷工作,有着极高的实用性和推广价值。
技术研发人员:过希文,王文睿,朱昱州,潘年胜,周香
受保护的技术使用者:安徽大学
技术研发日:20230523
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!