一种底座可升降的机械臂的制作方法
本技术涉及机械设备,具体是一种底座可升降的机械臂。
背景技术:
1、机械臂是最早出现的工业机器人,也是最早出现的现代机器人,工业机械臂是拟人手臂、手腕和手功能的机械电子装置,它可把任一物件或工具按空间位姿的时变要求进行移动,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、经过检索,公告号为cn108673556a的实用新型名称本实用新型公开一种机械臂,文中提出“机械臂包括多个保持件,相邻所述保持件之间通过关节连接,机械臂还包括闭锁机构、连杆机构和解锁机构,闭锁机构位于保持件关节的连接处;相邻闭锁机构之间通过连杆机构连接;解锁机构位于机械臂的一端且与闭锁机构连接,解锁机构能够被外力操纵以便控制闭锁机构解锁或者闭锁。当闭锁机构处于闭锁状态时,保持件与关节刚性连接,用于稳定支撑,当需要改变机械臂的空间位置时,通过外力操纵解锁机构以控制闭锁机构解锁,使得保持件与关节之间可转动连接;连杆机构便于运动的传递,使得在位于机械臂一端的解锁机构上施力,即可解锁所有闭锁机构,操作方便且调整灵活。”但是在使用时,由于机械臂的底座是固定不变的,机械臂的底座不具有升降功能,只能够模拟人手进行一些机械操作,机械臂操作高度是相对有限的,无法依据实际需求调整机械臂的高度,而且机械臂长度不能伸缩,操作的空间范围受限制,导致机械臂的工作效果具有局限性。
技术实现思路
1、本实用新型提供一种底座可升降的机械臂,用来解决上述背景技术中提到的,由于机械臂的底座是固定不变的,机械臂的底座不具有升降功能,只能够模拟人手进行一些机械操作,机械臂操作高度是相对有限的,无法依据实际需求调整机械臂的高度,而且机械臂长度不能伸缩,操作的空间范围受限制,导致机械臂的工作效果具有局限性的问题。
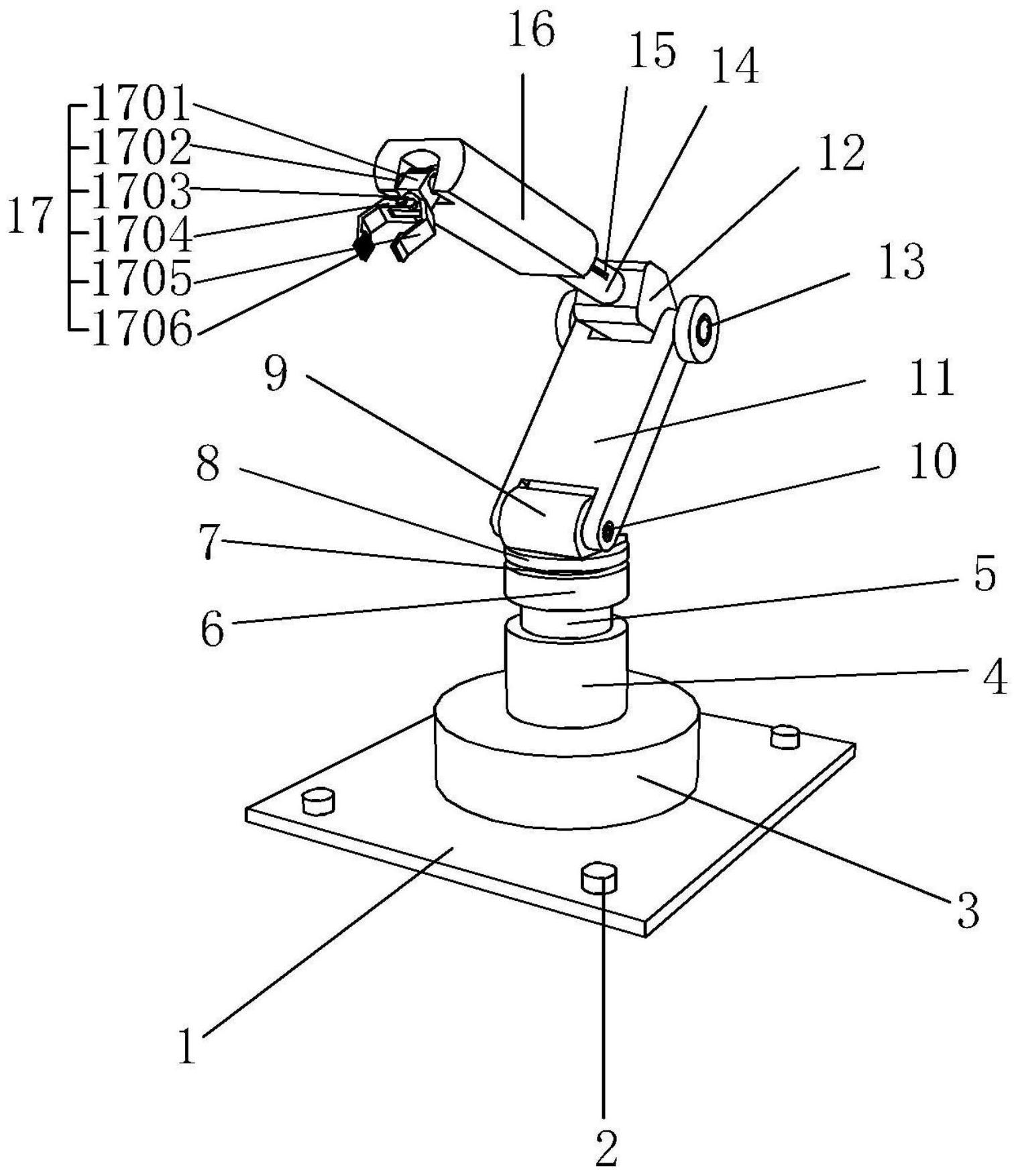
2、本实用新型提供如下技术方案:一种底座可升降的机械臂,包括固定底座和机械夹头机构,所述固定底座的表面设置有固定螺栓,所述固定底座的上方设置有控制器,所述控制器的顶部设置有支撑柱,所述支撑柱的顶部设置有伸缩柱,所述伸缩柱的上方连接有旋转电机,所述旋转电机的顶部设置有转动轴,所述转动轴的顶部设置有机械臂连接座,所述机械臂连接座的上方连接有固定件,所述固定件的侧面设置有第一连接轴,所述第一连接轴的侧面设置有转动支撑杆,所述转动支撑杆的一端设置有机械臂控制件,所述机械臂控制件的侧面设置有第二连接轴,所述机械臂控制件的一端设置有支撑杆,所述支撑杆的侧面设置有滑轨,所述支撑杆的一端设置有活动杆,所述活动杆的底部设置有机械夹头机构,所述机械夹头机构包括夹头固定件、第三连接轴、夹片控制件、左夹片、右夹片和防滑垫,所述活动杆的底部设置有夹头固定件,所述夹头固定件的侧面设置有第三连接轴,所述第三连接轴的侧面设置有夹片控制件,所述夹片控制件的一端设置有左夹片,所述夹片控制件的一端设置有右夹片,所述右夹片的侧面设置有防滑垫。
3、优选的,所述伸缩柱贯穿于支撑柱,所述旋转电机通过伸缩柱与固定底座构成升降结构。
4、优选的,所述转动轴与旋转电机和机械臂连接座之间为卡槽连接,所述机械臂连接座通过转动轴与固定底座构成旋转结构。
5、优选的,所述固定件与机械臂连接座之间为焊接连接,所述转动支撑杆通过第一连接轴与机械臂连接座构成旋转结构。
6、优选的,所述第二连接轴贯穿于机械臂控制件和转动支撑杆,所述机械臂控制件通过第二连接轴与转动支撑杆构成旋转结构。
7、优选的,所述活动杆与支撑杆之间为卡槽连接,所述活动杆通过滑轨与支撑杆构成滑动连接。
8、优选的,所述第三连接轴贯穿于夹头固定件和活动杆,所述夹头固定件通过第三连接轴与活动杆构成旋转结构。
9、优选的,所述左夹片通过夹片控制件与右夹片构成旋转结构,所述防滑垫与左夹片和右夹片之间为粘连连接。
10、与现有技术相比,该一种底座可升降的机械臂具备如下有益效果:
11、通过伸缩柱的设置,在使用过程中,固定底座固定在操作台面,伸缩柱在支撑柱内部上下移动,可以依据实际需求将整个机械臂底座位置高度进行调节,扩大机械臂操作的活动高度范围,机械臂可以完成更多可以代替人工的工作内容。
12、通过活动杆的设置,在使用过程中,活动杆在支撑杆上滑动,调节机械臂长度,使得增加了机械夹头机构工作空间范围,提高机械臂的工作效率。
技术特征:
1.一种底座可升降的机械臂,包括固定底座(1)和机械夹头机构(17),其特征在于:所述固定底座(1)的表面设置有固定螺栓(2),所述固定底座(1)的上方设置有控制器(3),所述控制器(3)的顶部设置有支撑柱(4),所述支撑柱(4)的顶部设置有伸缩柱(5),所述伸缩柱(5)的上方连接有旋转电机(6),所述旋转电机(6)的顶部设置有转动轴(7),所述转动轴(7)的顶部设置有机械臂连接座(8),所述机械臂连接座(8)的上方连接有固定件(9),所述固定件(9)的侧面设置有第一连接轴(10),所述第一连接轴(10)的侧面设置有转动支撑杆(11),所述转动支撑杆(11)的一端设置有机械臂控制件(12),所述机械臂控制件(12)的侧面设置有第二连接轴(13),所述机械臂控制件(12)的一端设置有支撑杆(14),所述支撑杆(14)的侧面设置有滑轨(15),所述支撑杆(14)的一端设置有活动杆(16),所述活动杆(16)的底部设置有机械夹头机构(17),所述机械夹头机构(17)包括夹头固定件(1701)、第三连接轴(1702)、夹片控制件(1703)、左夹片(1704)、右夹片(1705)和防滑垫(1706),所述活动杆(16)的底部设置有夹头固定件(1701),所述夹头固定件(1701)的侧面设置有第三连接轴(1702),所述第三连接轴(1702)的侧面设置有夹片控制件(1703),所述夹片控制件(1703)的一端设置有左夹片(1704),所述夹片控制件(1703)的一端设置有右夹片(1705),所述右夹片(1705)的侧面设置有防滑垫(1706)。
2.根据权利要求1所述的一种底座可升降的机械臂,其特征在于,所述伸缩柱(5)贯穿于支撑柱(4),所述旋转电机(6)通过伸缩柱(5)与固定底座(1)构成升降结构。
3.根据权利要求1所述的一种底座可升降的机械臂,其特征在于,所述转动轴(7)与旋转电机(6)和机械臂连接座(8)之间为卡槽连接,所述机械臂连接座(8)通过转动轴(7)与固定底座(1)构成旋转结构。
4.根据权利要求1所述的一种底座可升降的机械臂,其特征在于,所述固定件(9)与机械臂连接座(8)之间为焊接连接,所述转动支撑杆(11)通过第一连接轴(10)与机械臂连接座(8)构成旋转结构。
5.根据权利要求1所述的一种底座可升降的机械臂,其特征在于,所述第二连接轴(13)贯穿于机械臂控制件(12)和转动支撑杆(11),所述机械臂控制件(12)通过第二连接轴(13)与转动支撑杆(11)构成旋转结构。
6.根据权利要求1所述的一种底座可升降的机械臂,其特征在于,所述活动杆(16)与支撑杆(14)之间为卡槽连接,所述活动杆(16)通过滑轨(15)与支撑杆(14)构成滑动连接。
7.根据权利要求1所述的一种底座可升降的机械臂,其特征在于,所述第三连接轴(1702)贯穿于夹头固定件(1701)和活动杆(16),所述夹头固定件(1701)通过第三连接轴(1702)与活动杆(16)构成旋转结构。
8.根据权利要求1所述的一种底座可升降的机械臂,其特征在于,所述左夹片(1704)通过夹片控制件(1703)与右夹片(1705)构成旋转结构,所述防滑垫(1706)与左夹片(1704)和右夹片(1705)之间为粘连连接。
技术总结
本技术公开了一种底座可升降的机械臂,包括固定底座,所述固定底座的表面设置有固定螺栓,所述控制器的顶部设置有支撑柱,所述支撑柱的顶部设置有伸缩柱,所述转动轴的顶部设置有机械臂连接座,所述机械臂连接座的上方连接有固定件,所述第一连接轴的侧面设置有转动支撑杆,所所述支撑杆的一端设置有活动杆,所述第三连接轴的侧面设置有夹片控制件。本技术通过伸缩柱和活动杆的设置,在使用过程中,固定底座固定在操作台面,伸缩柱在支撑柱内部上下移动,扩大机械臂操作的活动高度范围,活动杆在支撑杆上滑动,调节机械臂长度,使得增加了机械夹头机构工作空间范围,机械臂可以完成更多可以代替人工的工作内容。
技术研发人员:简德彪,李金铎
受保护的技术使用者:厦门鸿智达科技有限公司
技术研发日:20230525
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!