一种机器人交互安全装置的制作方法
本技术涉及物联网设备,具体为一种机器人交互安全装置。
背景技术:
1、目前机器人在工业、教育、娱乐等方面得到广泛地使用,同机器人交互也越来越常见,比如工业机器人,工业多关节机器人,拖动示教在工业应用、教育娱乐等方面有着较多的应用场景,如何实现在交互过程中的人身安全是该环节关注的重点,特别是对于那些本身缺乏安全功能的机器人。目前尚无特别完善的全套产品。
技术实现思路
1、本实用新型的目的在于提供一种机器人交互安全装置,以解决现有技术中存在的问题。
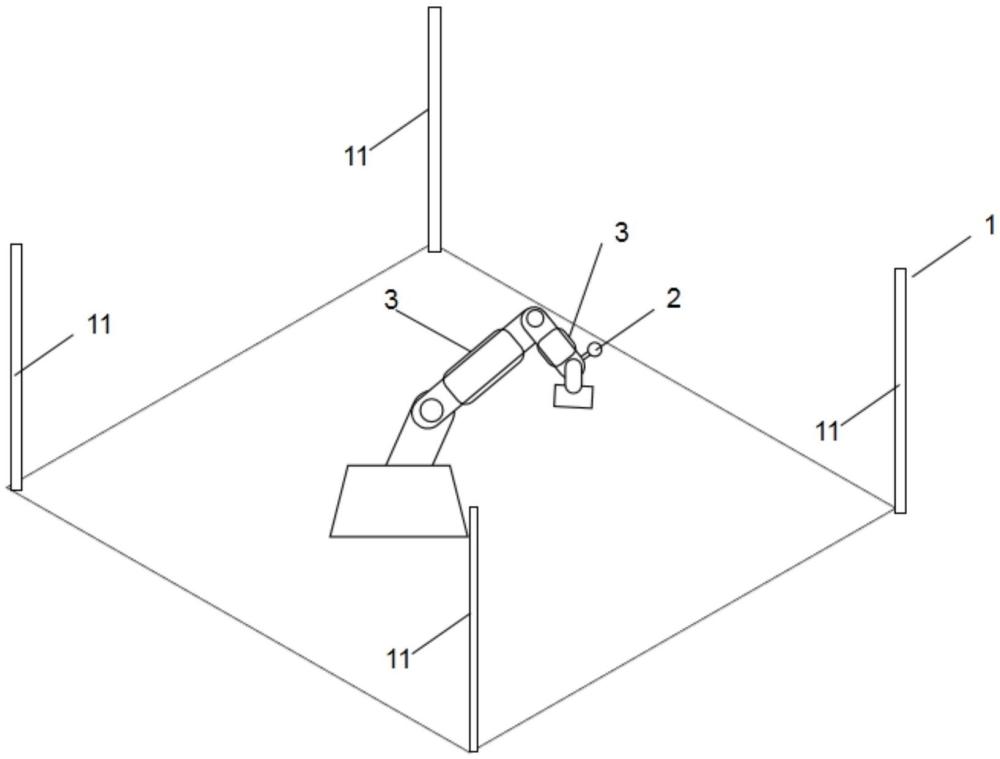
2、为了实现上述目的,本实用新型的技术方案提供了一种机器人交互安全装置,所述机器人为多关节机器人,包括区域安全桩、拖动示教手柄、机器人臂安全笼;所述区域安全桩包括多个安全桩,所述安全桩上设置有安全光栅的发射端和接收端;所述拖动示教手柄设置在机器人末端关节处,在所述拖动示教手柄内设置有六向力传感器;所述机器人臂安全笼设置在机器人臂外侧,包括两个安全笼支架、安全绳、应力片、控制部;所述安全绳穿过安全笼支架上的通孔,固定到应力片上。
3、优选地,所述安全笼支架为圆环状金属板材,设置在机器人臂两端,机器人臂位于安全笼支架内部。在所述安全笼支架上阵列分布用多个通孔。
4、优选地,所述应力片为多个,每个应力片固定有多根安全绳。
5、优选地,所述安全绳一端固定到应力片上,另一端固定到同应力片对称设置的凸起上。
6、优选地,相邻两所述安全绳之间的距离应小于3cm,所述安全绳同机器人臂外侧面距离应大于5cm。
7、优选地,所述安全绳为钢丝绳,弹性可以忽略,安全绳两端通过弹簧连接到应力片或凸起。
8、本实用新型通过区域安全桩、拖动示教手柄、机器人臂安全笼三重安全装置实现对机器人交互环节的安全保障,可以有效地提高互动人员的安全水平,尽可能减少外部人员闯入可能造成的安全事故,同时区域安全桩、机器人臂安全笼同机器人控制本身无直接关联,仅在检测到危险信号后对设备进行暂停或关机处理,减少对机器人控制系统的依赖,避免同机器人控制系统集成带来的工程难度。
9、为使本实用新型构思和其他目的、优点、特征及作用能更清楚易懂,将在下文具体实施方式中特举较佳实施例,并配合附图,作出详细展开说明。
技术特征:
1.一种机器人交互安全装置,所述机器人为多关节机器人,其特征在于,包括区域安全桩、拖动示教手柄、机器人臂安全笼;所述区域安全桩包括多个安全桩,所述安全桩上设置有安全光栅的发射端和接收端;所述拖动示教手柄设置在机器人末端关节处,在所述拖动示教手柄内设置有六向力传感器;所述机器人臂安全笼设置在机器人臂外侧,包括两个安全笼支架、安全绳、应力片、控制部;所述安全绳穿过安全笼支架上的通孔,固定到应力片上。
2.根据权利要求1所述一种机器人交互安全装置,其特征在于,所述安全笼支架为圆环状金属板材,设置在机器人臂两端,机器人臂位于安全笼支架内部,在所述安全笼支架上阵列分布用多个通孔。
3.根据权利要求2所述一种机器人交互安全装置,其特征在于,所述应力片为多个,每个应力片固定有多根安全绳。
4.根据权利要求3所述一种机器人交互安全装置,其特征在于,所述安全绳一端固定到应力片上,另一端固定到同应力片对称设置的凸起上。
5.根据权利要求3所述一种机器人交互安全装置,其特征在于,相邻两所述安全绳之间的距离应小于3cm,所述安全绳同机器人臂外侧面距离应大于5cm。
6.根据权利要求4所述一种机器人交互安全装置,其特征在于,所述安全绳为钢丝绳,弹性可以忽略,安全绳两端通过弹簧连接到应力片或凸起。
技术总结
本技术公开一种机器人交互安全装置,所述机器人为多关节机器人,包括区域安全桩、拖动示教手柄、机器人臂安全笼;所述区域安全桩包括多个安全桩,所述安全桩上设置有安全光栅的发射端和接收端;所述拖动示教手柄设置在机器人末端关节处,在所述拖动示教手柄内设置有六向力传感器;所述机器人臂安全笼设置在机器人臂外侧,包括两个安全笼支架、安全绳、应力片、控制部;所述安全绳穿过安全笼支架上的通孔,固定到应力片上。本技术通过区域安全桩、拖动示教手柄、机器人臂安全笼三重安全装置实现对机器人交互环节的安全保障,可以有效地提高互动人员的安全水平,尽可能减少外部人员闯入可能造成的安全事故。
技术研发人员:吴文玉,张玉,戴丹瑜
受保护的技术使用者:广州虫鸣创新科技有限公司
技术研发日:20230525
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!