一种移动操作机器人的多平台控制系统的制作方法
本技术属于机器人,特别涉及一种移动操作机器人的多平台控制系统。
背景技术:
1、随着机器人技术的日益发展,机器人的应用越来越广泛,几乎渗透到所有领域。机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合机电系统,能自动或半自动执行任务。移动操作机器人是机器人学中的一个重要分支,一般可分为轮式、腿足式、履带式等。其中,轮式移动操作机器人由于其控制简单,运动稳定和能源利用率高等特点应用较为广泛。
2、目前机器人控制多采用专用控制器,需要开发专用的控制器硬件和控制器系统,同时这些专用控制器仅能对相应的机器人进行控制;已有的基于移动平台的机器人控制方式单一,通用性不强。
技术实现思路
1、有鉴于此,本实用新型的目的在于提供一种具有多种控制方式的移动操作机器人的多平台控制系统。
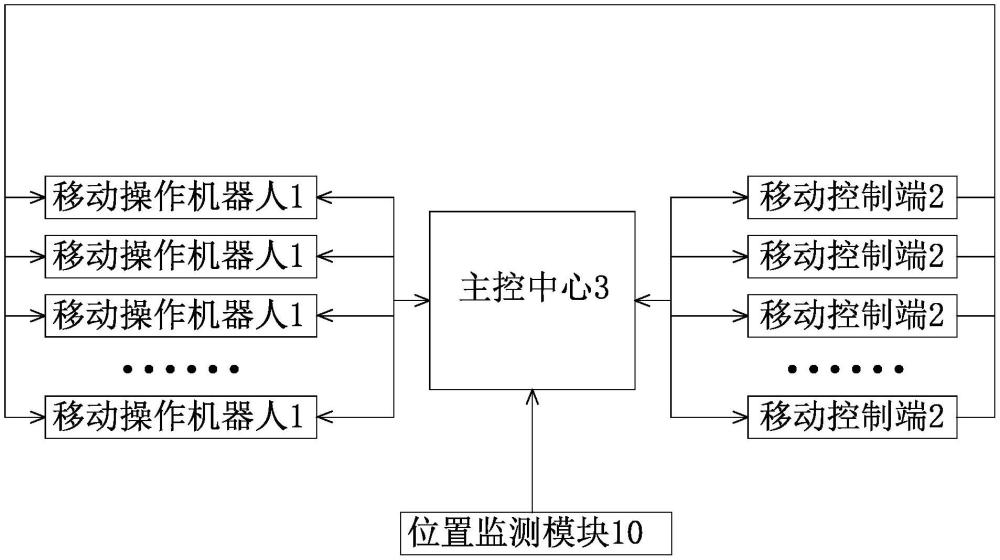
2、本实用新型的目的可通过下列技术方案来实现:一种移动操作机器人的多平台控制系统,包括至少一个移动操作机器人、至少一个移动控制端和一个主控中心,每个所述移动操作机器人通过有线网络或无线网络分别与各移动控制端以及主控中心连接通信,所述主控中心和各移动控制端连接通信;所述主控中心发送控制指令进行控制指定移动操作机器人,或者所述移动控制端发送控制指令控制指定移动操作机器人,或者所述移动控制端通过主控中心发送控制指令控制指定移动操作机器人,所述移动控制端包括但不限于移动操作机器人专用操控板、智能手机、平板电脑、笔记本电脑。
3、在上述的移动操作机器人的多平台控制系统中,所述移动操作机器人包括定位模块、地图导航模块、控制器plc、驱动模块和通信模块,所述定位模块和所述导航模块连接,所述地图导航模块和所述控制器plc连接,所述控制器plc分别和所述驱动模块、所述通信模块连接;所述地图导航模块用于通过由所述定位模块获取的所述移动操作机器人当前位置坐标和目标位置的坐标得到的所述移动操作机器人的移动路径并确定移动速度,所述控制器plc用于通过所述移动速度控制所述移动操作机器人的驱动模块,所述控制器plc还用于将移动操作机器人当前位置坐标、移动信息实时发送至主控中心。
4、在上述的移动操作机器人的多平台控制系统中,所述地图导航模块、驱动模块和通信模块均通过can总线和所述控制器plc双向连接。
5、在上述的移动操作机器人的多平台控制系统中,所述plc控制器还连接有语音交互模块,所述语音交互模块包括语音识别单元和语音播报单元,所述语音识别单元和语音播报单元均和控制器plc连接;所述语音识别模块用于识别用户的语音指令并发送给所述控制器plc;所述控制器plc将产生的语音信号发送给所述语音播报模块。
6、在上述的移动操作机器人的多平台控制系统中,所述无线网络包括4g网络、5g网络、蓝牙网络、wifi网络、zigbee网络中的一种或多种组合。
7、在上述的移动操作机器人的多平台控制系统中,还包括设置于移动操作机器人移动路径上的位置监测模块,所述位置监测模块通过有线网络或者无线网络和所述主控中心通信。
8、在上述的移动操作机器人的多平台控制系统中,所述位置监测模块为触碰传感器、霍尔传感器或红外传感器。
9、与现有技术相比,本移动操作机器人的多平台控制系统具有以下优点:
10、1、多种控制方式,可进行现场控制、远程控制,且控制装置多元化,适用性广。
11、2、增加语音控制,提高控制便利性,控制更多元化。
12、3、对移动操作机器人的移动路径进行监测反馈,利于控制移动操作机器人移动路径的调整、纠偏。
技术特征:
1.一种移动操作机器人的多平台控制系统,其特征在于,包括至少一个移动操作机器人(1)、至少一个移动控制端(2)和一个主控中心(3),每个移动操作机器人(1)通过有线网络或无线网络分别与各移动控制端(2)以及主控中心(3)连接通信,主控中心(3)和各移动控制端(2)连接通信;所述主控中心(3)发送控制指令进行控制指定移动操作机器人(1),或者所述移动控制端(2)发送控制指令控制指定移动操作机器人(1),或者所述移动控制端(2)通过主控中心(3)发送控制指令控制指定移动操作机器人(1),所述移动控制端(2)包括但不限于移动操作机器人(1)专用操控板、智能手机、平板电脑、笔记本电脑。
2.根据权利要求1所述的一种移动操作机器人的多平台控制系统,其特征在于,移动操作机器人(1)包括定位模块(4)、地图导航模块(5)、控制器plc(6)、驱动模块(7)和通信模块(9),定位模块(4)和导航模块连接,地图导航模块(5)和控制器plc(6)连接,控制器plc(6)分别和驱动模块(7)、通信模块(9)连接;地图导航模块(5)用于通过由定位模块(4)获取的移动操作机器人(1)当前位置坐标和目标位置的坐标得到的移动操作机器人(1)的移动路径并确定移动速度,控制器plc(6)用于通过移动速度控制移动操作机器人(1)的驱动模块(7),控制器plc(6)还用于将移动操作机器人(1)当前位置坐标、移动信息实时发送至主控中心(3)。
3.根据权利要求2所述的一种移动操作机器人的多平台控制系统,其特征在于,定位模块(4)、地图导航模块(5)、驱动模块(7)和通信模块(9)均通过can总线和控制器plc(6)双向连接。
4.根据权利要求2或3所述的一种移动操作机器人的多平台控制系统,其特征在于,plc控制器还连接有语音交互模块(8),语音交互模块(8)包括语音识别单元(8a)和语音播报单元(8b),语音识别单元(8a)和语音播报单元(8b)均和控制器plc(6)连接;语音识别模块用于识别用户的语音指令并发送给控制器plc(6);控制器plc(6)将产生的语音信号发送给语音播报模块。
5.根据权利要求1或2或3所述的一种移动操作机器人的多平台控制系统,其特征在于,无线网络包括4g网络、5g网络、蓝牙网络、wifi网络、zigbee网络中的一种或多种组合。
6.根据权利要求1或2或3所述的一种移动操作机器人的多平台控制系统,其特征在于,还包括设置于移动操作机器人(1)移动路径上的位置监测模块(10),位置监测模块(10)通过有线网络或者无线网络和主控中心(3)通信。
7.根据权利要求6所述的一种移动操作机器人的多平台控制系统,其特征在于,位置监测模块(10)为触碰传感器、霍尔传感器或红外传感器。
技术总结
本技术提供了一种移动操作机器人的多平台控制系统,属于机器人技术领域,本系统包括至少一个移动操作机器人、至少一个移动控制端和一个主控中心,每个移动操作机器人通过有线网络或无线网络分别与各移动控制端以及主控中心连接通信,主控中心和各移动控制端连接通信;主控中心发送控制指令控制指定移动操作机器人,或者移动控制端发送控制指令控制指定移动操作机器人,或者移动控制端通过主控中心发送控制指令控制指定移动操作机器人,移动控制端包括但不限于移动操作机器人专用操控板、智能手机、平板电脑、笔记本电脑。本系统能够使移动操作机器人的操控方式多元化,具有良好的适用性和实用性。
技术研发人员:王晓蕊,高博扬
受保护的技术使用者:北京知形科技有限公司
技术研发日:20230606
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!