用于吸附晶圆的机械手臂的制作方法
本申请涉及半导体自动化设备的领域,具体涉及一种用于吸附晶圆的机械手臂。
背景技术:
1、晶圆传送主要通过真空吸附原理实现,在机械臂上设置真空吸附结构,对晶圆进行吸附。目前具有真空吸附结构的机械臂,其真空吸附结构包括一个大尺寸的真空吸附点以及位于真空吸附点外圈的大尺寸密封圈。
2、sic晶圆是一种厚度较小的晶圆,由于其生产工艺部分需要在高温条件下进行,现有机械臂的真空吸附结构在吸附sic晶圆后,会使得sic晶圆产生较大的形变,甚至导致sic晶圆破碎。
3、因此,需要提供一种新的真空吸附机构,能够对sic晶圆进行稳定吸附,且不会造成sic晶圆产生较大形变而导致破碎。
技术实现思路
1、有鉴于此,本说明书实施例提供一种用于吸附晶圆的机械手臂,能够对sic晶圆进行稳定的吸附,且不会使得sic晶圆产生较大的形变而导致破碎。
2、本说明书实施例提供以下技术方案:
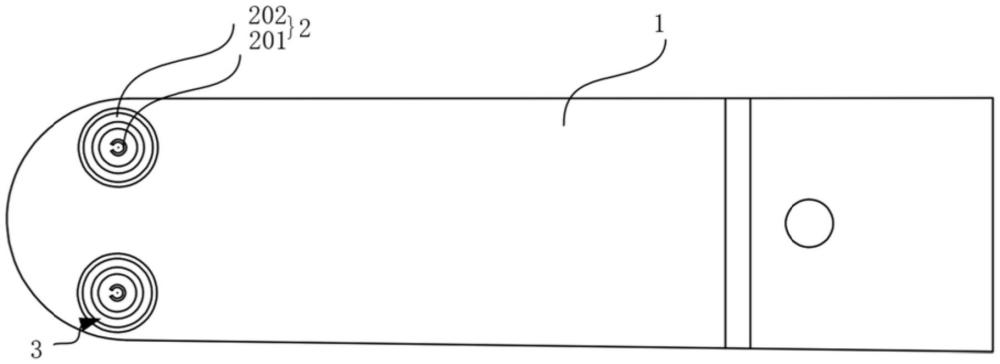
3、本说明书实施例提供一种用于吸附晶圆的机械手臂,包括机械臂本体,所述机械臂本体的端部设置有若干个真空吸附结构,所述真空吸附结构包括真空吸附点及位于真空吸附点外圈的密封圈,所述密封圈的上沿为背离机械臂本体的一端,且所述密封圈的上沿高于真空吸附点;
4、由所述真空吸附点向外延伸的真空吸附区域的直径为8-12mm;
5、当所述机械臂本体对晶圆进行吸附时,若干个所述真空吸附结构的吸附力共同作用于晶圆。
6、通过上述技术方案,减小真空吸附结构的整体尺寸并且将真空吸附区域的直径设置成8-12mm,相比于现有技术中机械臂的真空吸附结构,在相同的真空度下,具有更小的真空接触面积及更小的真空力,进而可以减少晶圆被吸附时所受到的作用力,减少晶圆可能发生的形变,降低晶圆破片的可能性,同时设置多个真空吸附结构共同作用于晶圆表面,也保证了对晶圆的稳定吸附,确保晶圆在不破片的情况,能够被稳定夹持。
7、优选的,所述真空吸附点的中心位置到密封圈上沿的轴向间隙为真空上区间隙,所述真空上区间隙为15-25um。
8、通过上述技术方案,设置真空上区间隙为15-25um,减少了晶圆被真空吸附结构吸附时,晶圆表面到真空吸附点中心位置的轴向距离,即使晶圆在受到吸附力而发生形变,由于晶圆表面到真空吸附点中心位置的轴向距离较小,因此也不会产生较大的形变,此距离设置可以保证晶圆被吸附时即使发生形变也不会破片,进一步的提高了晶圆被机械臂吸附夹持过程的可靠性和稳定性。
9、优选的,所述真空吸附区域的直径为10mm。
10、优选的,所述真空上区间隙为20um。
11、优选的,所述密封圈和晶圆之间的摩擦系数设置为0.4。
12、优选的,若干个所述真空吸附结构在机械臂本体的端部均匀分布。
13、优选的,所述真空吸附结构共有两个,两个所述真空吸附结构关于机械臂本体的长度方向对称分布。
14、优选的,两个所述真空吸附结构分别靠近机械臂本体的两条侧边分布。
15、优选的,所述密封圈的内径为10mm,外径为11mm。
16、优选的,所述真空吸附结构的真空度不小于70kpa。
17、与现有技术相比,本说明书实施例采用的上述至少一个技术方案能够达到的有益效果至少包括:
18、通过设置多个真空吸附结构并且减少了真空吸附结构的尺寸,从而在实际吸附晶圆过程中,可以有效减少单个真空吸附结构对晶圆产生的吸附力,使得晶圆在受到较小吸附力的情况下,产生较小的形变,从而减少被机械臂吸附夹持过程中的破片可能,再者,通过设置多个真空吸附结构,保证晶圆被机械臂吸附夹持过程中的稳定性和可靠性。
技术特征:
1.一种用于吸附晶圆的机械手臂,其特征在于,包括机械臂本体,所述机械臂本体的端部设置有若干个真空吸附结构,所述真空吸附结构包括真空吸附点及位于真空吸附点外圈的密封圈,所述密封圈的上沿为背离机械臂本体的一端,且所述密封圈的上沿高于真空吸附点;
2.根据权利要求1所述的用于吸附晶圆的机械手臂,其特征在于,所述真空吸附点的中心位置到密封圈上沿的轴向间隙为真空上区间隙,所述真空上区间隙为15-25um。
3.根据权利要求1所述的用于吸附晶圆的机械手臂,其特征在于,所述真空吸附区域的直径为10mm。
4.根据权利要求2所述的用于吸附晶圆的机械手臂,其特征在于,所述真空上区间隙为20um。
5.根据权利要求1所述的用于吸附晶圆的机械手臂,其特征在于,所述密封圈和晶圆之间的摩擦系数设置为0.4。
6.根据权利要求1所述的用于吸附晶圆的机械手臂,其特征在于,若干个所述真空吸附结构在机械臂本体的端部均匀分布。
7.根据权利要求6所述的用于吸附晶圆的机械手臂,其特征在于,所述真空吸附结构共有两个,两个所述真空吸附结构关于机械臂本体的长度方向对称分布。
8.根据权利要求7所述的用于吸附晶圆的机械手臂,其特征在于,两个所述真空吸附结构分别靠近机械臂本体的两条侧边分布。
9.根据权利要求1所述的用于吸附晶圆的机械手臂,其特征在于,所述密封圈的内径为10mm,外径为11mm。
10.根据权利要求1所述的用于吸附晶圆的机械手臂,其特征在于,所述真空吸附结构的真空度不小于70kpa。
技术总结
本申请提供一种用于吸附晶圆的机械手臂,涉及半导体自动化设备的领域,其包括机械臂本体,机械臂本体的端部设置有若干个真空吸附结构,真空吸附结构包括真空吸附点及密封圈,密封圈的上沿为背离机械臂本体的一端,密封圈的上沿高于真空吸附点;真空吸附区域的直径为8‑12mm;当机械臂本体对晶圆进行吸附时,若干个真空吸附结构的吸附力共同作用于晶圆。通过设置多个真空吸附结构并且减少了真空吸附结构的尺寸,有效减少单个真空吸附结构对晶圆产生的吸附力,使得晶圆在受到较小吸附力的情况下,产生较小的形变,从而减少被机械臂吸附夹持过程中的破片可能,再者,通过设置多个真空吸附结构,保证晶圆被吸附夹持过程中的稳定性和可靠性。
技术研发人员:熊健,王海南,沈显青
受保护的技术使用者:上海积塔半导体有限公司
技术研发日:20230606
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!