一种两自由度一体化机械臂关节的制作方法
本技术涉及机械臂关节,具体涉及一种两自由度一体化机械臂关节。
背景技术:
1、技术变革日新月异,机械臂的技术发展,呈现从大型化到小型化、从自动化到智能化,从工业领域逐步拓展到医疗、教育和生活等方方面面的发展趋势。随着机械臂技术长期发展和演变,机械臂关节技术呈现高速、大负载、轻质化和小型化发展趋势。机械臂关节技术是机械臂核心部件,整体结构依附于机械臂关节物理尺寸的限制,对机器人的整体性能有决定性影响。
2、现有一体化关节均为单一自由度,由单自由度关节组装的两自由度装置其占用空间体积相对更大,不利于协作机械臂的避障。由单自由度关节组装的装置,由于定位配合面角度,其运动精度会由于装配的误差而降低。
技术实现思路
1、本实用新型的目的在于:针对上述存在的问题,本实用新型提供一种两自由度一体化机械臂关节,通过将两个机械关节l型布置的结构、采用外转子结构的驱动元件、改进了刹车结构、优化了控制部的布局,可以有效减少外壳体积,提高空间利用率,满足了两自由度一体化机械臂关节小型化的需求。
2、本实用新型采用的技术方案如下:
3、一种两自由度一体化机械臂关节,包括外壳和两个机械关节,两个机械关节的轴线相互垂直,机械关节的包括依次连接的输出部、驱动部和控制部,两个机械关节中将输出部伸出外壳的为第一关节,将控制部伸入外壳的为第二关节,所述第一关节和第二关节相互配合形成l字型结构,所述第一关节为l字型结构的短边、第二关节为l字型结构的长边。
4、进一步地,所述机械关节还包括壳体,所述驱动部设于壳体内;所述驱动部包括转子、定子、转子轴、电机法兰和谐波减速器,所述输出部包括输出法兰和输出轴,所述输出法兰伸出壳体形成向外输送转动的输出端;所述定子通过电机法兰固定于壳体,所述转子包括相互连接的连接部和驱动部,所述连接部与转子轴连接,所述转子轴通过电机轴承与壳体可转动连接,所述驱动部环绕于定子外,所述驱动部与定子匹配的内表面均布有磁钢,所述磁钢与定子之间设置有间隔,所述转子轴通过谐波减速器差速转动连接于输出法兰;输出轴一端通过输出轴承与壳体可转动连接、另一端连接于输出法兰,所述输出轴穿过转子轴的内孔,所述转子轴环设于输出轴外并与输出轴间隔有间距。
5、进一步地,所述输出轴相对于连接输出法兰的一端设有可限制输出轴的刹车结构,所述刹车结构包括刹车支架、刹车片、卡挡钉、电磁铁和弹性元件,所述刹车支架固定于壳体;所述刹车支架上设有与卡挡钉端部匹配的卡挡槽;所述刹车片固定于输出轴,所述刹车片周向均布有多个卡挡爪;所述电磁铁和刹车支架沿轴向分设于刹车片的两端,所述卡挡钉的一端限制于刹车支架上的卡挡槽、另一端连接于电磁铁的输出端,所述卡挡钉位于刹车片的一侧,所述卡挡钉上设有可限制卡挡爪的卡挡凸块,所述卡挡凸块与刹车片之间设有弹性元件,所述电磁铁的输出端设于刹车片的外侧且与刹车片在径向上间隔有间距,所述电磁铁可作用于卡挡钉使卡挡钉向卡挡槽内移动,所述弹性元件可作用于卡挡钉使卡挡钉向电磁铁移动,所述弹性元件对卡挡钉的作用力小于电磁铁通电时对卡挡钉的作用力,所述弹性元件和电磁铁相互配合沿轴向移动卡挡钉。
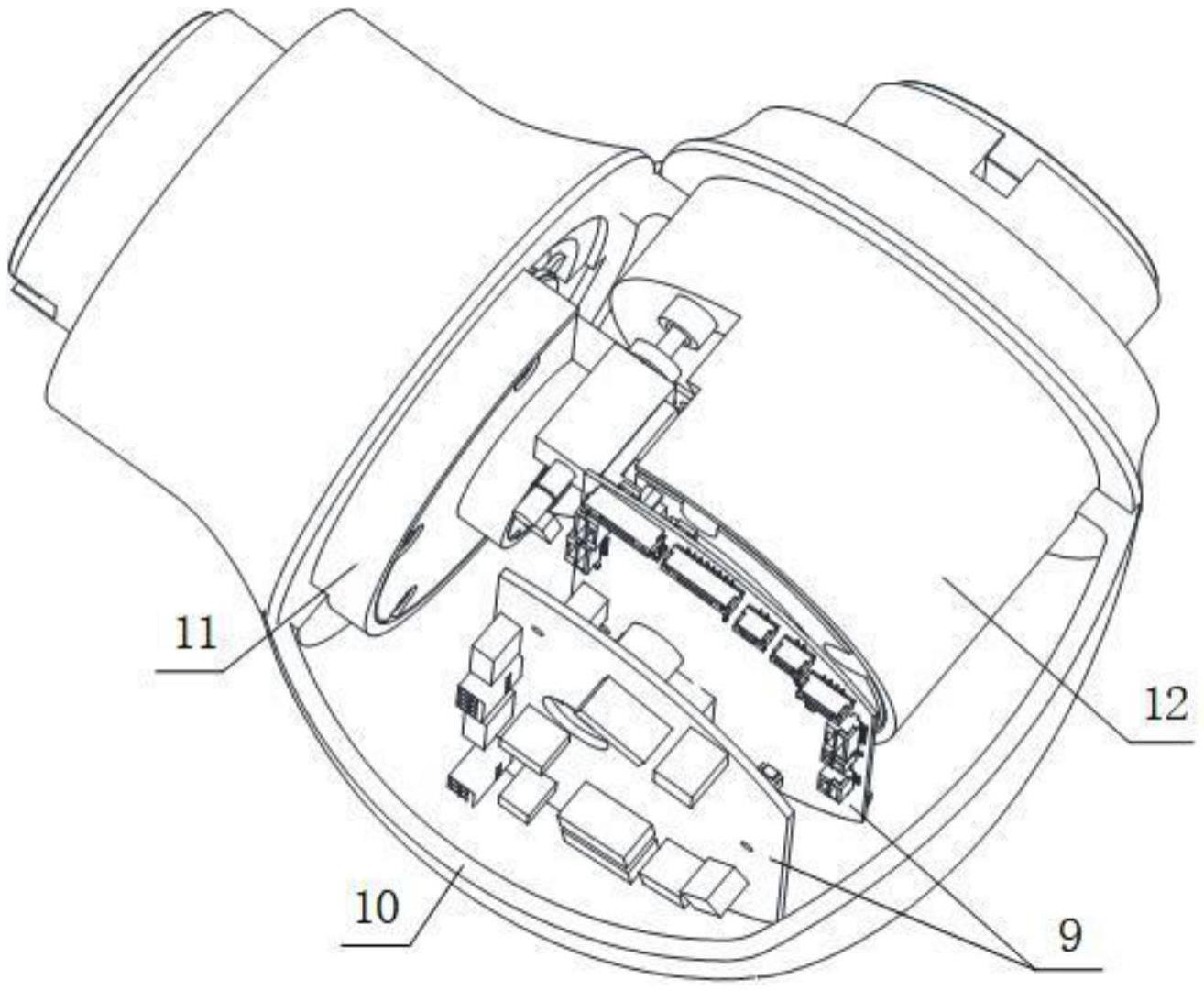
6、进一步地,所述控制部设于壳体内,所述控制部处的壳体为一侧形成有外部容置空间的阶梯结构,所述电磁铁设置于壳体外的外部容置空间。
7、进一步地,所述控制部包括多块沿轴向层叠布置的控制板。
8、进一步地,所述电磁铁设于容置空间的一侧。
9、进一步地,所述第一关节的容置空间与第二关节的外部容置空间相对设置。
10、进一步地,所述连接部相对于定子的一侧设有可采集转子转动角度和转速的电机编码器;所述输出轴相对于连接输出法兰的一端设置有可采集输出轴转动角度和转速的关节编码器。
11、进一步地,所述输出法兰一侧与输出轴紧固连接、另一侧设置有扭矩传感器。
12、进一步地,所述输出轴为中空的管状结构。
13、综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
14、1、本实用新型第一关节和第二关节呈l字型布置,可有效减少外壳内的空置区域,提高空间利用率,满足了两自由度一体化机械臂关节小型化的需求。
15、2、本实用新型通过采用外转子电机作为驱动元件,在保证达到相同输出力矩的情况下,可减小驱动元件整体尺寸从而使机械关节更紧凑,实现对机械关节小型化的需求。
16、3、本实用新型刹车结构的卡挡钉在断电后,可以通过弹性元件复位,结构简单稳定。
17、4、本实用新型通过刹车结构可以在驱动元件停止驱动后实现对输出轴的制动,提高控制精度。
18、5、本实用新型输出轴和转子轴均可相对壳体独立旋转。
19、6、本实用新型输出轴中空可以用于线缆走线。
技术特征:
1.一种两自由度一体化机械臂关节,其特征在于,包括外壳和两个机械关节,两个机械关节的轴线相互垂直,机械关节的包括依次连接的输出部、驱动部和控制部,两个机械关节中将输出部伸出外壳的为第一关节,将控制部伸入外壳的为第二关节,所述第一关节和第二关节相互配合形成l字型结构,所述第一关节为l字型结构的短边、第二关节为l字型结构的长边。
2.如权利要求1所述的两自由度一体化机械臂关节,其特征在于,所述机械关节还包括壳体,所述驱动部设于壳体内;所述驱动部包括转子、定子、转子轴、电机法兰和谐波减速器,所述输出部包括输出法兰和输出轴,所述输出法兰伸出壳体形成向外输送转动的输出端;所述定子通过电机法兰固定于壳体,所述转子包括相互连接的连接部和驱动部,所述连接部与转子轴连接,所述转子轴通过电机轴承与壳体可转动连接,所述驱动部环绕于定子外,所述驱动部与定子匹配的内表面均布有磁钢,所述磁钢与定子之间设置有间隔,所述转子轴通过谐波减速器差速转动连接于输出法兰;输出轴一端通过输出轴承与壳体可转动连接、另一端连接于输出法兰,所述输出轴穿过转子轴的内孔,所述转子轴环设于输出轴外并与输出轴间隔有间距。
3.如权利要求2所述的两自由度一体化机械臂关节,其特征在于,所述输出轴相对于连接输出法兰的一端设有可限制输出轴的刹车结构,所述刹车结构包括刹车支架、刹车片、卡挡钉、电磁铁和弹性元件,所述刹车支架固定于壳体;所述刹车支架上设有与卡挡钉端部匹配的卡挡槽;所述刹车片固定于输出轴,所述刹车片周向均布有多个卡挡爪;所述电磁铁和刹车支架沿轴向分设于刹车片的两端,所述卡挡钉的一端限制于刹车支架上的卡挡槽、另一端连接于电磁铁的输出端,所述卡挡钉位于刹车片的一侧,所述卡挡钉上设有可限制卡挡爪的卡挡凸块,所述卡挡凸块与刹车片之间设有弹性元件,所述电磁铁的输出端设于刹车片的外侧且与刹车片在径向上间隔有间距,所述电磁铁可作用于卡挡钉使卡挡钉向卡挡槽内移动,所述弹性元件可作用于卡挡钉使卡挡钉向电磁铁移动,所述弹性元件对卡挡钉的作用力小于电磁铁通电时对卡挡钉的作用力,所述弹性元件和电磁铁相互配合沿轴向移动卡挡钉。
4.如权利要求3所述的两自由度一体化机械臂关节,其特征在于,所述控制部设于壳体内,所述控制部处的壳体为一侧形成有外部容置空间的阶梯结构,所述电磁铁设置于壳体外的外部容置空间。
5.如权利要求4所述的两自由度一体化机械臂关节,其特征在于,所述控制部包括多块沿轴向层叠布置的控制板。
6.如权利要求4所述的两自由度一体化机械臂关节,其特征在于,所述电磁铁设于容置空间的一侧。
7.如权利要求4-6任一权利要求所述的两自由度一体化机械臂关节,其特征在于,所述第一关节的容置空间与第二关节的外部容置空间相对设置。
8.如权利要求2所述的两自由度一体化机械臂关节,其特征在于,所述连接部相对于定子的一侧设有可采集转子转动角度和转速的电机编码器;所述输出轴相对于连接输出法兰的一端设置有可采集输出轴转动角度和转速的关节编码器。
9.如权利要求2所述的两自由度一体化机械臂关节,其特征在于,所述输出法兰一侧与输出轴紧固连接、另一侧设置有扭矩传感器。
10.如权利要求2所述的两自由度一体化机械臂关节,其特征在于,所述输出轴为中空的管状结构。
技术总结
本技术公开了一种两自由度一体化机械臂关节,涉及机械臂关节技术领域,包括外壳和两个机械关节,两个机械关节的轴线相互垂直,机械关节的包括依次连接的输出部、驱动部和控制部,两个机械关节中将输出部伸出外壳的为第一关节,将控制部伸入外壳的为第二关节,所述第一关节和第二关节相互配合形成L字型结构,所述第一关节为L字型结构的短边、第二关节为L字型结构的长边。本技术提供的两自由度一体化机械臂关节,通过将两个机械关节L型布置的结构、采用外转子结构的驱动元件、改进了刹车结构、优化了控制部的布局,可以有效减少外壳体积,提高空间利用率,满足了两自由度一体化机械臂关节小型化的需求。
技术研发人员:牛福永
受保护的技术使用者:中科璀璨机器人(成都)有限公司
技术研发日:20230609
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!