一种智能压铸机取件喷涂机器人的制作方法
本技术涉及取件机器人,尤其涉及一种智能压铸机取件喷涂机器人。
背景技术:
1、压铸工艺能够将金属溶液利用高压的金属模具,成型成金属制品,在成型后,因为其表面较高的温度,需要使用取件机器人将其取出,然后将其放置在水中进行冷却,再进行后续的加工流程,在取件时,根据工件的大小,将特定的夹取头安装在机械臂的底端,此时机器人的机械臂伸入打开的模具中间,机械臂端部的夹取头对准工件的夹取位置,液压装置带动夹取头动作,将工件夹持住,并将其从模具的内部拿取出,实现脱模取件的工序。
2、但是现在的夹取头需要根据工件的大小和形状,专门进行定制,使用范围较窄,且单一的液压增压方式导致工件夹取时的稳定性较差。
技术实现思路
1、本实用新型的目的是为了解决现有技术中夹取头使用范围窄,且夹取时稳定性差的问题,而提出的一种智能压铸机取件喷涂机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
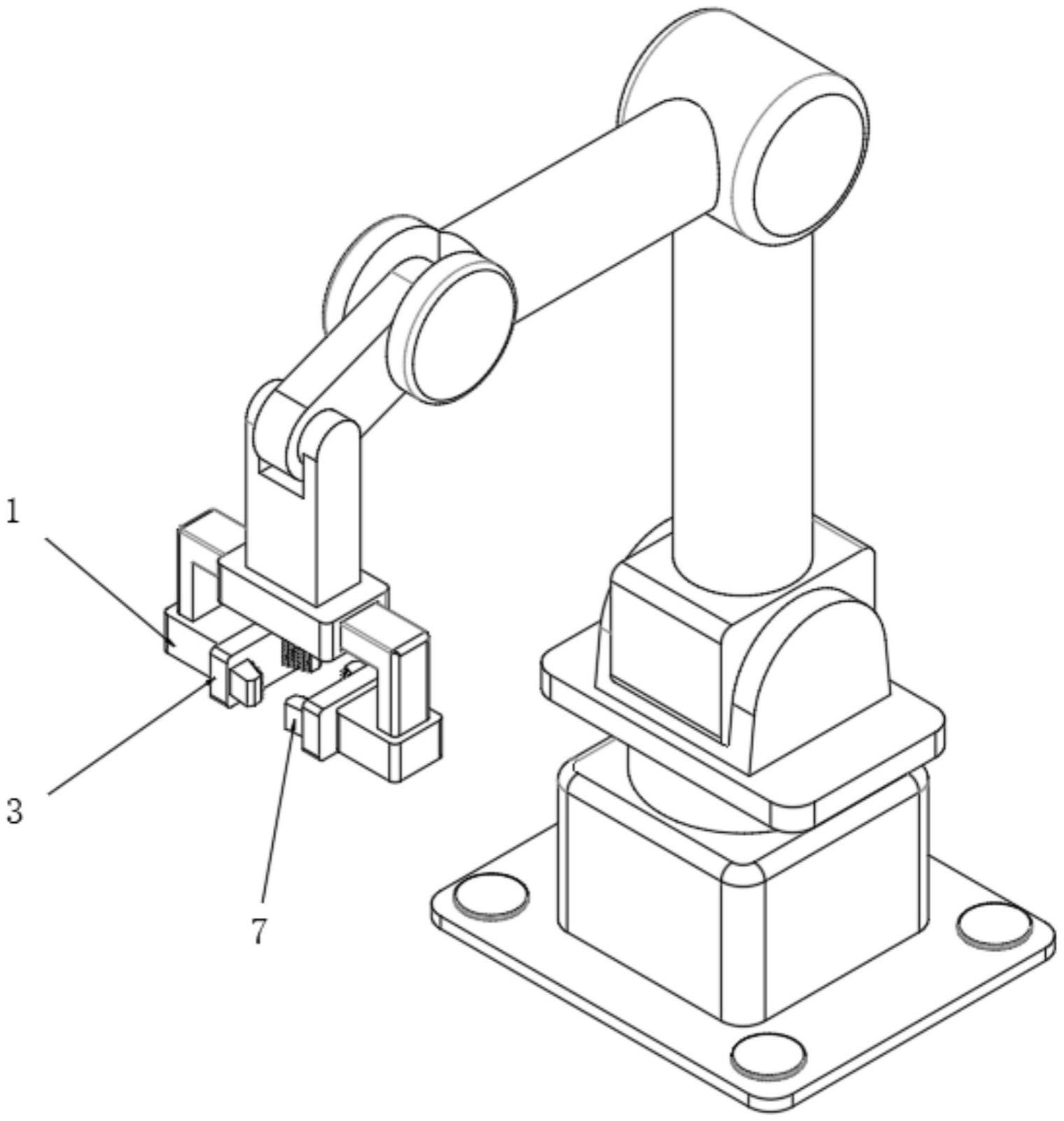
3、一种智能压铸机取件喷涂机器人,包括机座,所述机座侧壁的表面开设有插槽,所述机座的侧面设有安装架,所述安装架靠近机座一侧的侧壁表面固定连接有插块,所述插块的表面设有连接机构,所述安装架的内部设有传动机构,所述安装架两侧的内部滑动连接有夹持架,所述夹持架靠近安装架中心一侧的内部设有夹紧机构,所述夹持架远离夹紧机构的一侧设有调节机构,所述夹持架内部的中心开设有活动槽,所述夹持架靠近活动槽的底部开设有滑轨;
4、所述连接机构包括限位槽,所述限位槽的内部滑动连接有限位杆,所述限位杆的顶端固定连接有支板,所述支板的表面啮合有锁紧螺钉。
5、优选的,所述限位槽开设在插块的上表面,所述机座靠近插槽的上侧开设有圆孔,所述限位杆穿插过圆孔的内部,所述机座的上表面开设有螺纹孔,所述锁紧螺钉与螺纹孔位于同一竖直线上。
6、优选的,所述传动机构包括转动板,所述转动板的底部固定连接有一号传动齿轮,所述一号传动齿轮的侧面啮合有二号传动齿轮,所述二号传动齿轮的远离一号传动齿轮的一侧固定连接有螺纹杆。
7、优选的,所述安装架的内部开设有凹槽,所述一号传动齿轮竖直放置,位于凹槽内部的上侧,所述二号传动齿轮水平放置,所述夹持架靠近安装架一侧的表面开设有内螺纹槽,所述螺纹杆与内螺纹槽位于同一水平面上,且啮合在内螺纹槽内部。
8、优选的,所述夹紧机构包括通孔,所述通孔的内部滑动连接有滑杆,所述滑杆的底端固定连接有夹紧块,所述夹紧块的底部表面固定连接有凸块,所述滑杆远离夹紧块的一端固定连接有楔形板,所述滑杆的外表面活动连接有复位弹簧。
9、优选的,所述凸块为顶端为锐角的锥形块,所述楔形板的上表面为斜面,所述通孔与滑轨相互连通,且所述楔形板活动连接在滑轨的内部。
10、优选的,所述调节机构包括滑槽,所述滑槽的内部滑动连接有滑块,所述滑块侧壁的表面开设有方槽,所述方槽的内部滑动连接定位块,所述定位块靠近方槽底部一侧的表面固定连接有顶出弹簧,所述滑槽的侧壁表面开设有定位槽,所述滑块的底部固定连接有支杆,所述支杆远离滑块的一端固定连接有连接板,所述连接板的底部固定连接有传动杆,所述传动杆的底部转动连接有滚轮。
11、优选的,所述滑槽与活动槽相互连通,所述活动槽与滑轨相互连通,所述连接板滑动连接在活动槽的内部,所述滚轮滑动连接在滑轨的内部。
12、优选的,所述定位块与定位槽位于同一水平面上,且所述定位块为楔形块,所述定位槽为楔形槽。
13、与现有技术相比,本实用新型提供了一种智能压铸机取件喷涂机器人,具备以下有益效果:
14、1、该智能压铸机取件喷涂机器人,通过安装架通过连接机构能够固定在机架的内部,且夹持架能够在传动机构的带动下在安装架的内部左右滑动,两侧的夹持架之间的间距能够改变,从而达到了能够根据所需夹取物品的大小调节夹取头的间距,扩大了夹取机器人夹取范围的效果。
15、2、该智能压铸机取件喷涂机器人,通过滑块在滑槽内部的上下滑动,使得调节机构内部的滚轮能够在楔形板的表面滑动,楔形板能够通过滑杆带动夹紧块的伸展与收缩,且夹紧块的表面设有锥形凸块,从而达到了能够根据物品的表面形状调整夹紧块的位置,使得夹取头能够始终保持与物品较大接触面积,提高了物品夹取时稳定性的效果。
技术特征:
1.一种智能压铸机取件喷涂机器人,包括机座(1),其特征在于,所述机座(1)侧壁的表面开设有插槽(2),所述机座(1)的侧面设有安装架(3),所述安装架(3)靠近机座(1)一侧的侧壁表面固定连接有插块(4),所述插块(4)的表面设有连接机构(5),所述安装架(3)的内部设有传动机构(6),所述安装架(3)两侧的内部滑动连接有夹持架(7),所述夹持架(7)靠近安装架(3)中心一侧的内部设有夹紧机构(8),所述夹持架(7)远离夹紧机构(8)的一侧设有调节机构(9),所述夹持架(7)内部的中心开设有活动槽(10),所述夹持架(7)靠近活动槽(10)的底部开设有滑轨(11);
2.根据权利要求1所述的一种智能压铸机取件喷涂机器人,其特征在于,所述限位槽(501)开设在插块(4)的上表面,所述机座(1)靠近插槽(2)的上侧开设有圆孔,所述限位杆(502)穿插过圆孔的内部,所述机座(1)的上表面开设有螺纹孔,所述锁紧螺钉(504)与螺纹孔位于同一竖直线上。
3.根据权利要求2所述的一种智能压铸机取件喷涂机器人,其特征在于,所述传动机构(6)包括转动板(601),所述转动板(601)的底部固定连接有一号传动齿轮(602),所述一号传动齿轮(602)的侧面啮合有二号传动齿轮(603),所述二号传动齿轮(603)的远离一号传动齿轮(602)的一侧固定连接有螺纹杆(604)。
4.根据权利要求3所述的一种智能压铸机取件喷涂机器人,其特征在于,所述安装架(3)的内部开设有凹槽,所述一号传动齿轮(602)竖直放置,位于凹槽内部的上侧,所述二号传动齿轮(603)水平放置,所述夹持架(7)靠近安装架(3)一侧的表面开设有内螺纹槽,所述螺纹杆(604)与内螺纹槽位于同一水平面上,且啮合在内螺纹槽内部。
5.根据权利要求3所述的一种智能压铸机取件喷涂机器人,其特征在于,所述夹紧机构(8)包括通孔(801),所述通孔(801)的内部滑动连接有滑杆(802),所述滑杆(802)的底端固定连接有夹紧块(803),所述夹紧块(803)的底部表面固定连接有凸块(804),所述滑杆(802)远离夹紧块(803)的一端固定连接有楔形板(805),所述滑杆(802)的外表面活动连接有复位弹簧(806)。
6.根据权利要求5所述的一种智能压铸机取件喷涂机器人,其特征在于,所述凸块(804)为顶端为锐角的锥形块,所述楔形板(805)的上表面为斜面,所述通孔(801)与滑轨(11)相互连通,且所述楔形板(805)活动连接在滑轨(11)的内部。
7.根据权利要求5所述的一种智能压铸机取件喷涂机器人,其特征在于,所述调节机构(9)包括滑槽(901),所述滑槽(901)的内部滑动连接有滑块(902),所述滑块(902)侧壁的表面开设有方槽(903),所述方槽(903)的内部滑动连接定位块(904),所述定位块(904)靠近方槽(903)底部一侧的表面固定连接有顶出弹簧(905),所述滑槽(901)的侧壁表面开设有定位槽(906),所述滑块(902)的底部固定连接有支杆(907),所述支杆(907)远离滑块(902)的一端固定连接有连接板(908),所述连接板(908)的底部固定连接有传动杆(909),所述传动杆(909)的底部转动连接有滚轮(910)。
8.根据权利要求7所述的一种智能压铸机取件喷涂机器人,其特征在于,所述滑槽(901)与活动槽(10)相互连通,所述活动槽(10)与滑轨(11)相互连通,所述连接板(908)滑动连接在活动槽(10)的内部,所述滚轮(910)滑动连接在滑轨(11)的内部。
9.根据权利要求7所述的一种智能压铸机取件喷涂机器人,其特征在于,所述定位块(904)与定位槽(906)位于同一水平面上,且所述定位块(904)为楔形块,所述定位槽(906)为楔形槽。
技术总结
本技术公开了一种智能压铸机取件喷涂机器人,包括机座,所述机座侧壁的表面开设有插槽,所述机座的侧面设有安装架,所述安装架靠近机座一侧的侧壁表面固定连接有插块,所述安装架两侧的内部滑动连接有夹持架,所述夹持架靠近安装架中心一侧的内部设有夹紧机构,所述夹持架远离夹紧机构的一侧设有调节机构,通过滑块在滑槽内部的上下滑动,使得调节机构内部的滚轮能够在楔形板的表面滑动,楔形板能够通过滑杆带动夹紧块的伸展与收缩,且夹紧块的表面设有锥形凸块,从而达到了能够根据物品的表面形状调整夹紧块的位置,使得夹取头能够始终保持与物品较大接触面积,提高了物品夹取时稳定性的效果。
技术研发人员:韩刚
受保护的技术使用者:沃尔林自动化(苏州)有限公司
技术研发日:20230620
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!