一种搬运机器人的夹持器
本技术涉及搬运机器人,具体是一种搬运机器人的夹持器。
背景技术:
1、搬运机器人是可以进行自动化搬运作业的工业机器人。其搬运作业是指将物件从一个工位转移到另一个工位,中国专利网公开了《一种机器人搬运用夹持臂》授权公告号为(cn216543355u),该申请的夹持安装架安装在转动器底端,连接机构由连接盘、限位滑槽和连接滑块组成,限位滑槽开设在连接盘表面,连接滑块滑动连接在限位滑槽内部,且连接滑块有多个,在使用时便于进行调节夹持机构的夹持方位,便于对物件的不同方位进行夹持,有效满足夹持需求,便于搬运使用,同时便于进行安装和拆卸,方便后期进行检修。
2、但是,上述申请中的夹持装置在使用中遇到不规则的物件在被夹持时容易发生脱落的情况。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种搬运机器人的夹持器,解决了上述背景中提到的问题。
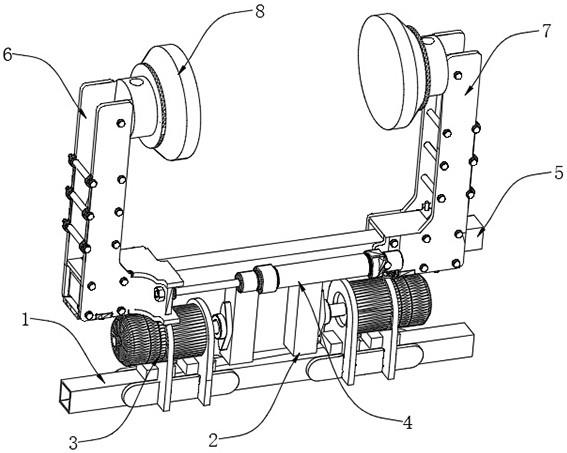
2、本实用新型提供如下技术方案:一种搬运机器人的夹持器,包括固定桁架,所述固定桁架的上方一侧端安装有第一夹持臂,所述固定桁架的上方另一侧端安装有第二夹持臂,所述第一夹持臂及所述第二夹持臂的自由端均设置有夹持爪,所述夹持爪包括:定位螺栓、充气连孔、气囊,所述第一夹持臂及所述第二夹持臂之间连接有气缸,所述气缸的一端设置有伸缩杆,所述伸缩杆的一端位于所述第一夹持臂的外侧设置有伸缩杆连接架。
3、作为本实用新型再进一步的方案:所述第一夹持臂及所述第二夹持臂的下端内侧设置有活动导杆,所述活动导杆的上下表面位于所述第一夹持臂及所述第二夹持臂的内侧均设置有上导轮,所述活动导杆的左右两侧均设置有侧导轮,所述侧导轮及所述上导轮的内部均安装有转动轴。
4、作为本实用新型再进一步的方案:所述固定桁架的上表面安装有气泵,所述气泵与所述活动导杆之间连接有支撑架。
5、作为本实用新型再进一步的方案:所述夹持爪通过所述定位螺栓与所述第一夹持臂及所述第二夹持臂均固定连接。
6、作为本实用新型再进一步的方案:所述第一夹持臂及所述第二夹持臂通过所述上导轮及所述侧导轮与所述活动导杆活动连接。
7、作为本实用新型再进一步的方案:所述气囊的内部填充有eps泡沫颗粒。
8、作为本实用新型再进一步的方案:所述气泵与所述充气连孔之间连接有充气管道。
9、作为本实用新型再进一步的方案:所述上导轮及所述侧导轮均通过所述转动轴与所述第一夹持臂及所述第二夹持臂固定连接。
10、与现有技术相比,本实用新型的有益效果是:
11、夹持爪上的气囊的内部填充有eps泡沫颗粒,抓取货物后,通过气泵对气囊内部进行抽气,气囊会形成与货物形状互补的形状,达到自适应的目的,可以方便对一些不规则的物件进行稳定的夹持。
12、在第一夹持臂和第二夹持臂内部设置的上导轮和侧导轮在转动轴的作用下在活动导杆的外侧进行滚动作用,可以减少摩擦导致活动导杆尺寸受损,不方便后续的导向。
技术特征:
1.一种搬运机器人的夹持器,包括固定桁架(1),其特征在于,所述固定桁架(1)的上方一侧端安装有第一夹持臂(6),所述固定桁架(1)的上方另一侧端安装有第二夹持臂(7),所述第一夹持臂(6)及所述第二夹持臂(7)的自由端均设置有夹持爪(8),所述夹持爪(8)包括:定位螺栓(801)、充气连孔(802)、气囊(803),所述第一夹持臂(6)及所述第二夹持臂(7)之间连接有气缸(4),所述气缸(4)的一端设置有伸缩杆(401),所述伸缩杆(401)的一端位于所述第一夹持臂(6)的外侧设置有伸缩杆连接架(604)。
2.根据权利要求1所述的一种搬运机器人的夹持器,其特征在于,所述第一夹持臂(6)及所述第二夹持臂(7)的下端内侧设置有活动导杆(5),所述活动导杆(5)的上下表面位于所述第一夹持臂(6)及所述第二夹持臂(7)的内侧均设置有上导轮(601),所述活动导杆(5)的左右两侧均设置有侧导轮(602),所述侧导轮(602)及所述上导轮(601)的内部均安装有转动轴(603)。
3.根据权利要求2所述的一种搬运机器人的夹持器,其特征在于,所述固定桁架(1)的上表面安装有气泵(3),所述气泵(3)与所述活动导杆(5)之间连接有支撑架(2)。
4.根据权利要求1所述的一种搬运机器人的夹持器,其特征在于,所述夹持爪(8)通过所述定位螺栓(801)与所述第一夹持臂(6)及所述第二夹持臂(7)均固定连接。
5.根据权利要求2所述的一种搬运机器人的夹持器,其特征在于,所述第一夹持臂(6)及所述第二夹持臂(7)通过所述上导轮(601)及所述侧导轮(602)与所述活动导杆(5)活动连接。
6.根据权利要求1所述的一种搬运机器人的夹持器,其特征在于,所述气囊(803)的内部填充有eps泡沫颗粒。
7.根据权利要求3所述的一种搬运机器人的夹持器,其特征在于,所述气泵(3)与所述充气连孔(802)之间连接有充气管道。
8.根据权利要求2所述的一种搬运机器人的夹持器,其特征在于,所述上导轮(601)及所述侧导轮(602)均通过所述转动轴(603)与所述第一夹持臂(6)及所述第二夹持臂(7)固定连接。
技术总结
本技术涉及搬运机器人技术领域,具体公开了一种搬运机器人的夹持器,包括固定桁架,所述固定桁架的上方一侧端安装有第一夹持臂,所述固定桁架的上方另一侧端安装有第二夹持臂,所述第一夹持臂及所述第二夹持臂的自由端均设置有夹持爪,所述夹持爪包括:定位螺栓、充气连孔、气囊,所述第一夹持臂及所述第二夹持臂之间连接有气缸,所述气缸的一端设置有伸缩杆,所述伸缩杆的一端位于所述第一夹持臂的外侧设置有伸缩杆连接架。
技术研发人员:黄超雷,游婉婷
受保护的技术使用者:长安大学
技术研发日:20230620
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!