机器人管线固定架的制作方法
本技术涉及机器人,具体为机器人管线固定架。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、中国专利文献库中,申请号为2020108581022的专利公开了一种基于巡逻机器人的内部管线固定架,通过在壳体内部设置固定夹具和活动夹具,对线缆进行夹持固定,但是固定夹具和活动夹具均为弧形结构,不便于对多根单独线缆进行固定限位,单独对某一线缆进行固定或者取出时需要调节整个活动夹具,可能导致线缆的错乱,使用不便。
技术实现思路
1、本实用新型的目的在于提供一种机器人管线固定架,以解决上述背景技术中提出的问题。
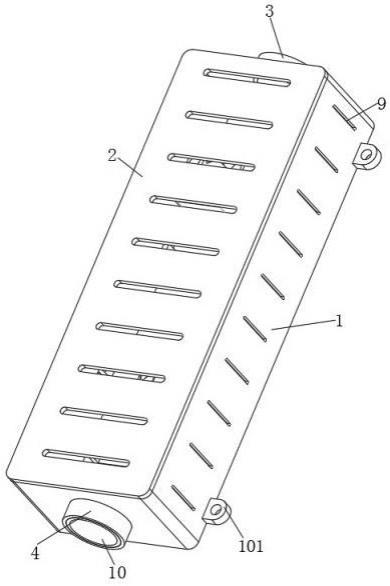
2、为实现上述目的,本实用新型提供如下技术方案:机器人管线固定架,包括外壳体,所述外壳体的顶端设置有可开合的活动门,所述外壳体的上下两端分别贯穿设置有与其内部连通的进线端和出线端,所述外壳体的内部依次间隔设置有用于对线缆进行限位的第一限位件和第二限位件,所述第一限位件固定在外壳体的内侧壁上,所述第二限位件通过弹性支撑件可调式设置在外壳体的内部。
3、进一步地,所述第一限位件包括固定在外壳体内侧壁上的固定底板和设置在固定底板一侧的第一侧板。
4、进一步地,所述第二限位件包括限位顶板、设置在限位顶板一侧的第二侧板、固定在第二侧板远离限位顶板一端的安装板,所述限位顶板和固定底板相互平行,所述第二侧板设置在限位顶板远离第一侧板的一侧,所述第二侧板和第一侧板分别对线缆的两侧进行限位,所述限位顶板用于对线缆的顶端限位。
5、进一步地,所述弹性支撑件包括固定在外壳体内侧壁上的导向立柱、套接在导向立柱上的弹簧和用于对弹簧进行限位的挡块,所述安装板上贯穿设置有容纳第二限位件沿着导向立柱的长度方向来回滑动的通孔,所述弹簧的一端与安装板相抵接,另一端与挡块相抵接。
6、进一步地,所述导向立柱包括与外壳体固定连接的定位段、与挡块螺纹连接的圆柱段和连接定位段和圆柱段的过渡段,所述通孔与定位段相互匹配。
7、进一步地,所述外壳体和活动门的侧壁上贯穿设置有若干通风孔,所述活动门的内侧壁上安装有散热风扇。
8、进一步地,所述进线端和出线端的内侧壁上均设置有弹性橡胶圈。
9、进一步地,所述第一限位件和第二限位件的内侧壁上均设置有弹性橡胶垫。
10、与现有技术相比,本实用新型的有益效果是:该机器人管线固定架
11、通过设置间隔排列的第一限位件和第二限位件,第二限位件通过弹性支撑件与外壳体可调式连接,可以对多根线缆同时进行限位固定,且第一限位件和第二限位件上的侧边分别位于两侧,当需要对某一根线缆进行限位或者取出时,绕着缺口走线即可,使用方便,同时适用性强;
12、通过在外壳体和活动门上设置通风孔,活动门的背面设置散热风扇,可以对线缆进行散热,避免热量堆积发生危险。
技术特征:
1.机器人管线固定架,包括外壳体(1),其特征在于:所述外壳体(1)的顶端设置有可开合的活动门(2),所述外壳体(1)的上下两端分别贯穿设置有与其内部连通的进线端(3)和出线端(4),所述外壳体(1)的内部依次间隔设置有用于对线缆进行限位的第一限位件(5)和第二限位件(6),所述第一限位件(5)固定在外壳体(1)的内侧壁上,所述第二限位件(6)通过弹性支撑件(7)可调式设置在外壳体(1)的内部。
2.根据权利要求1所述的机器人管线固定架,其特征在于:所述第一限位件(5)包括固定在外壳体(1)内侧壁上的固定底板(501)和设置在固定底板(501)一侧的第一侧板(502)。
3.根据权利要求2所述的机器人管线固定架,其特征在于:所述第二限位件(6)包括限位顶板(601)、设置在限位顶板(601)一侧的第二侧板(602)、固定在第二侧板(602)远离限位顶板(601)一端的安装板(603),所述限位顶板(601)和固定底板(501)相互平行,所述第二侧板(602)设置在限位顶板(601)远离第一侧板(502)的一侧,所述第二侧板(602)和第一侧板(502)分别对线缆的两侧进行限位,所述限位顶板(601)用于对线缆的顶端限位。
4.根据权利要求3所述的机器人管线固定架,其特征在于:所述弹性支撑件(7)包括固定在外壳体(1)内侧壁上的导向立柱(701)、套接在导向立柱(701)上的弹簧(702)和用于对弹簧(702)进行限位的挡块(703),所述安装板(603)上贯穿设置有容纳第二限位件(6)沿着导向立柱(701)的长度方向来回滑动的通孔(6031),所述弹簧(702)的一端与安装板(603)相抵接,另一端与挡块(703)相抵接。
5.根据权利要求4所述的机器人管线固定架,其特征在于:所述导向立柱(701)包括与外壳体(1)固定连接的定位段(7011)、与挡块(703)螺纹连接的圆柱段(7012)和连接定位段(7011)和圆柱段(7012)的过渡段,所述通孔(6031)与定位段(7011)相互匹配。
6.根据权利要求1所述的机器人管线固定架,其特征在于:所述外壳体(1)和活动门(2)的侧壁上贯穿设置有若干通风孔(9),所述活动门(2)的内侧壁上安装有散热风扇(8)。
7.根据权利要求1所述的机器人管线固定架,其特征在于:所述进线端(3)和出线端(4)的内侧壁上均设置有弹性橡胶圈(10)。
8.根据权利要求1所述的机器人管线固定架,其特征在于:所述第一限位件(5)和第二限位件(6)的内侧壁上均设置有弹性橡胶垫。
技术总结
本技术涉及机器人技术领域,尤其涉及一种机器人管线固定架,包括外壳体,所述外壳体的顶端设置有可开合的活动门,所述外壳体的上下两端分别贯穿设置有与其内部连通的进线端和出线端,所述外壳体的内部依次间隔设置有用于对线缆进行限位的第一限位件和第二限位件,所述第一限位件固定在外壳体的内侧壁上,所述第二限位件通过弹性支撑件可调式设置在外壳体的内部,可以同时对多根线缆进行限位固定,适用性强,同时检修方便。
技术研发人员:徐博
受保护的技术使用者:中升科技(常州)有限公司
技术研发日:20230629
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!