一种示教机械手系统的制作方法
本技术涉及机械手,尤其是一种示教机械手系统。
背景技术:
1、目前用于抓握任务的机器人,其工作的核心在于机械臂与其末端执行器(如机械手、夹持器等)的控制过程。机器人的抓握任务通常分为任务目标定位跟随环节与抓握交互环节,现有技术往往更加注重机器人的手臂末端是否能准确地到达、跟随给定的期望目标(如位置、速度),柔顺控制也主要应用于防止机械臂与环境发生过硬碰撞的场合,暂时缺少对所抓物体整体进行刚度控制的方案。
2、现有机器人抓取控制系统主要针对特定场景物体的抓握与放置,机器人机械臂的末端执行器通常只考虑根据当前物体的形状或者是预设的特征设定夹持器的抓取方式。然而这种抓取方式仅通过人为给定的期望刚度对机器人及所抓物体进行整体刚度控制无法实现快速地达到当前任务所期望的效果。
技术实现思路
1、针对现有技术的不足,本实用新型提供一种示教机械手系统。
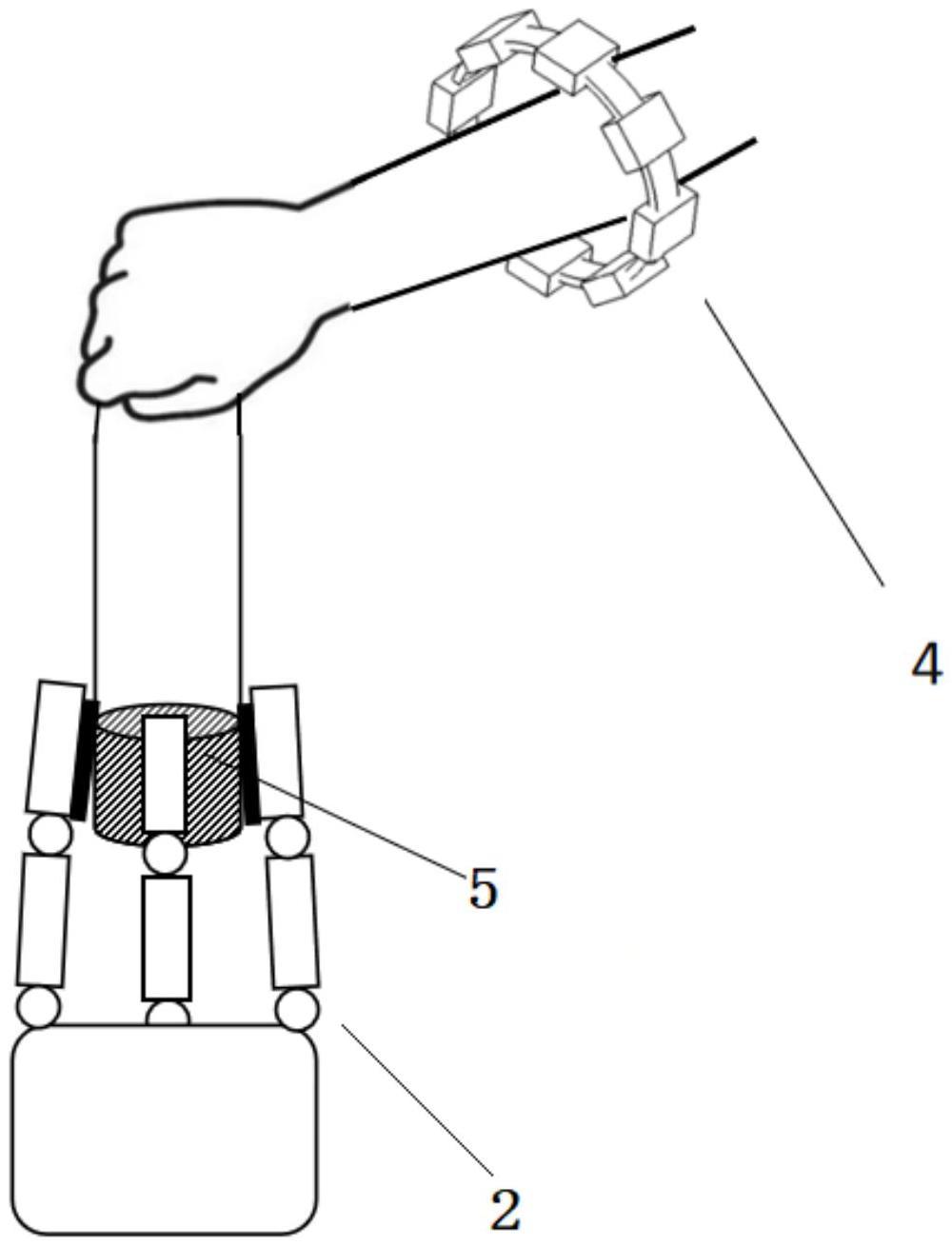
2、本实用新型的技术方案为:一种示教机械手系统,包括机械臂、设置在机械臂末端的执行器、安装于执行器上的多个力传感器;还包括佩戴在工作人员前臂上的用于采集手臂肌电信号的肌电信号传感器,以及与多个力传感器、肌电信号传感器通讯连接的控制端。
3、作为优选的,所述的机械臂为多轴机械臂。
4、作为优选的,所述的执行器为三指抓取爪,且每个抓取爪上均设置有相应的力传感器。
5、作为优选的,是的三指抓取爪包括底座,和设置在底座下端的三根抓取爪。
6、作为优选的,每个所述的抓取爪具有两个关节,且所述的力传感器设置在远离底座的另一关节上。
7、作为优选的,所述的底座上端设置有用于机械臂末端连接的连接法兰。
8、本实用新型的有益效果为:
9、1、本实用新型通过在抓取爪的末端关节上设置力传感器,从而可以实时准确获取机械手抓取物体时的力;在示教过程,人手和抓取爪同时抓住相同的物体,通过肌电信号传感器获取在抓取过程人手臂上的肌电信号,并根据肌电信号获取抓取的刚度值;然后将抓取刚度的信号发送给机械手进行相应的抓取;从而提高机械手的示教效果。
技术特征:
1.一种示教机械手系统,其特征在于:包括机械臂(1)、设置在机械臂(1)末端的执行器(2)、安装于执行器(2)上的多个力传感器(3);还包括佩戴在工作人员前臂上的用于采集手臂肌电信号的肌电信号传感器(4),以及与多个力传感器(3)、肌电信号传感器(4)通讯连接的控制端。
2.根据权利要求1所述的一种示教机械手系统,其特征在于:所述的机械臂(1)为多轴机械臂(1)。
3.根据权利要求1所述的一种示教机械手系统,其特征在于:所述的执行器(2)为三指抓取爪,且每个抓取爪上均设置有相应的力传感器(3)。
4.根据权利要求3所述的一种示教机械手系统,其特征在于:所述的三指抓取爪包括底座(21),和设置在底座(21)下端的三根抓取爪(22)。
5.根据权利要求4所述的一种示教机械手系统,其特征在于:每个所述的抓取爪(22)具有两个关节,且所述的力传感器(3)设置在远离底座(21)的另一关节上。
6.根据权利要求4所述的一种示教机械手系统,其特征在于:所述的底座(21)上端设置有用于机械臂(1)末端连接的连接法兰(23)。
技术总结
本技术提供一种示教机械手系统,包括机械臂、设置在机械臂末端的执行器、安装于执行器上的多个力传感器;还包括佩戴在工作人员前臂上的用于采集手臂肌电信号的肌电信号传感器,以及与多个力传感器、肌电信号传感器通讯连接的控制端。本技术通过在抓取爪的末端关节上设置力传感器,从而可以实时准确获取机械手抓取物体时的力;在示教过程,人手和抓取爪同时抓住相同的物体,通过肌电信号传感器获取在抓取过程人手臂上的肌电信号,并根据肌电信号获取抓取的刚度值;然后将抓取刚度的信号发送给机械手进行相应的抓取;从而提高机械手的示教效果。
技术研发人员:陈敬翔,黄浩晖,杨辰光,戴诗陆
受保护的技术使用者:佛山纽欣肯智能科技有限公司
技术研发日:20230630
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!