一种双重定位行走机构的制作方法
本技术涉及智能巡检机器人,特别是一种双重定位行走机构。
背景技术:
1、挂轨式机器人为预设计开发一种新型的智能巡检机器人形式,行走机构作为挂轨式机器人的重要组成部分,现有的一些挂轨式机器人的行走机构定位结构较为单一,定位精度较差,且一些能够实现双重定位的行走机构,目标定位块安装较为麻烦,每个定位点均需要反复调试,才能够实现双重精准定位,安装较为麻烦:
2、对此,本实用新型提出一种双重定位行走机构,予以解决。
技术实现思路
1、本实用新型的目的旨在至少解决所述技术缺陷之一。
2、为此,本实用新型的一个目的在于提出一种双重定位行走机构,以解决背景技术中所提到的问题,克服现有技术中存在的不足。
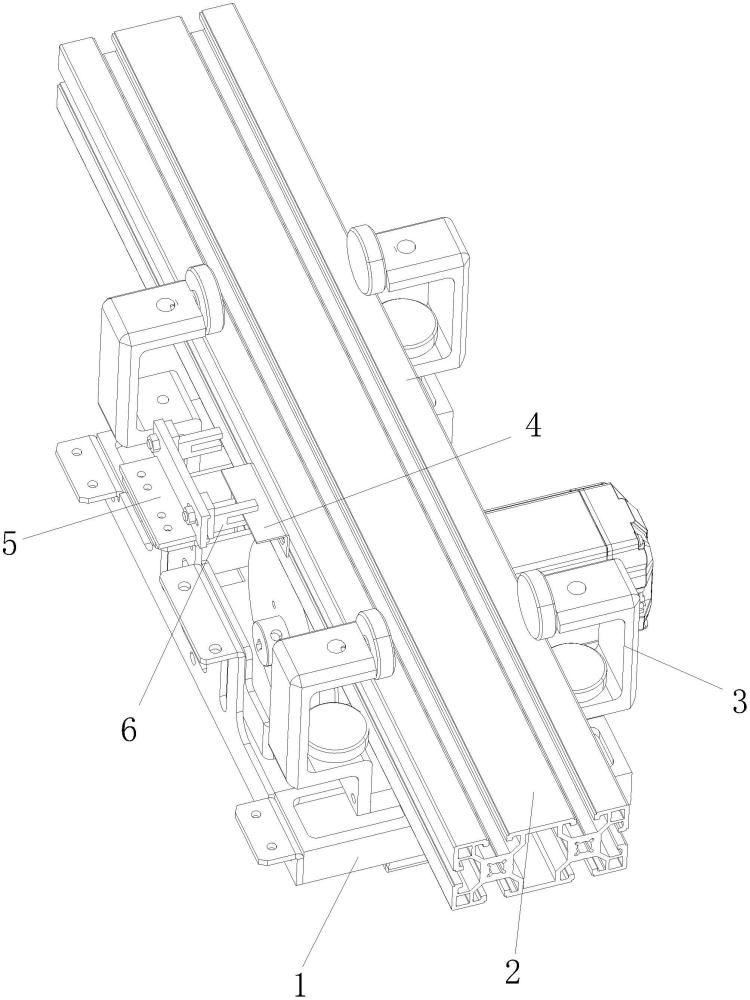
3、为了实现上述目的,本实用新型一方面的实施例提供一种双重定位行走机构,包括安装架和行走轨道,所述安装架的两侧均转动连接有行走支架,所述行走支架的内部搭接于行走轨道的外表面,所述行走轨道的一侧固定安装有目标定位块,所述安装架的一侧固定安装有定位机构;
4、所述定位机构包括定位安装架,所述定位安装架的一侧固定安装有两个光电开关。
5、由上述任一方案优选的是,所述定位安装架的通过螺栓固定安装于安装架的一侧,所述定位安装架的一侧开设有一个固定孔和一侧槽孔。
6、由上述任一方案优选的是,所述两个所述光电开关的一侧均固定安装有一个安装块,两个所述安装块的一侧均固定连接有一个螺杆,两个所述螺杆的外表面均螺纹连接有一个锁紧螺母,所述锁紧螺母的一侧均搭接于定位安装架的一侧。
7、由上述任一方案优选的是,其中一个所述螺杆的外表面插接于固定孔的内部,另一个所述螺杆的外部插接于槽孔的内部。
8、采用上述方案达到的技术效果是:便于调整间距,提高定位精度。
9、由上述任一方案优选的是,两个所述行走支架的两侧均转动连接有一个第一行走支架轮,两个所述行走支架的两侧均转动连接有一个第二行走支架轮。
10、由上述任一方案优选的是,所述第一行走支架轮和第二行走支架轮外表面均搭接于行走轨道的外表面。
11、采用上述方案达到的技术效果是:便于在行走轨道上行走。
12、与现有技术相比,本实用新型所具有的优点和有益效果为:
13、本实用新型将两个光电开关安装于安装架的同一侧,且工作时对行走轨道上的同一目标定位块进行双重定位,保证了定位的精度,需要对多个位置进行定位时,只需要在每个定位点采用同规格的目标定位块即可,且只需要对两个光电开关进行一侧调整,即可对每个定位点的目标定位块进行精准定位,避免了现有双重定位行走机构需要在每个定位点调试定位块位置的问题,有效减少了安装时间,保证了装置的实用性。
14、本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种双重定位行走机构,其特征在于:包括安装架(1)和行走轨道(2),所述安装架(1)的两侧均转动连接有行走支架(3),所述行走支架(3)的内部搭接于行走轨道(2)的外表面,所述行走轨道(2)的一侧固定安装有目标定位块(4),所述安装架(1)的一侧固定安装有定位机构(5);
2.根据权利要求1所述的一种双重定位行走机构,其特征在于:所述定位安装架(51)的通过螺栓固定安装于安装架(1)的一侧,所述定位安装架(51)的一侧开设有一个固定孔(52)和一侧槽孔(53)。
3.根据权利要求2所述的一种双重定位行走机构,其特征在于:所述两个所述光电开关(6)的一侧均固定安装有一个安装块(61),两个所述安装块(61)的一侧均固定连接有一个螺杆(62),两个所述螺杆(62)的外表面均螺纹连接有一个锁紧螺母(63),所述锁紧螺母(63)的一侧均搭接于定位安装架(51)的一侧。
4.根据权利要求3所述的一种双重定位行走机构,其特征在于:其中一个所述螺杆(62)的外表面插接于固定孔(52)的内部,另一个所述螺杆(62)的外部插接于槽孔(53)的内部。
5.根据权利要求4所述的一种双重定位行走机构,其特征在于:两个所述行走支架(3)的两侧均转动连接有一个第一行走支架轮,两个所述行走支架的两侧均转动连接有一个第二行走支架轮。
6.根据权利要求5所述的一种双重定位行走机构,其特征在于:所述第一行走支架轮和第二行走支架轮外表面均搭接于行走轨道(2)的外表面。
技术总结
本技术涉及智能巡检机器人技术领域,特别是一种双重定位行走机构,包括安装架和行走轨道,所述安装架的两侧均转动连接有行走支架,所述行走支架的内部搭接于行走轨道的外表面,所述行走轨道的一侧固定安装有目标定位块,所述安装架的一侧固定安装有定位机构。本技术的优点在于:本技术将两个光电开关安装于安装架的同一侧,且工作时对行走轨道上的同一目标定位块进行双重定位,保证了定位的精度,需要对多个位置进行定位时,只需要在每个定位点采用同规格的目标定位块即可,且只需要对两个光电开关进行一侧调整,即可对每个定位点的目标定位块进行精准定位,有效减少了安装时间,保证了装置的实用性。
技术研发人员:魏杰涛,田子豪,谷玉龙
受保护的技术使用者:北京超维世纪科技有限公司
技术研发日:20230704
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!