一种制壳机械手自动上下料抓手及制壳机械手的制作方法
本技术涉及制壳机械手,尤其涉及一种制壳机械手自动上下料抓手及制壳机械手。
背景技术:
1、熔模铸造又称失腊法铸造,在蜡模表面涂上多层耐火材料,如高岭矾土、石英砂等,待其彻底硬化干燥后,熔去其中的蜡模从而制成型壳,为了提高制壳生产效率,现阶段部分厂家引进了制壳机械手,如cn202223276450.2的中国实用新型专利公开了一种四头八臂高效制壳机械手,通过制壳机械手完成粘浆、滴浆以及淋砂工序,相比传统人工操作,达到高效制壳的目的,减轻了工作人员的劳动强度,但是其制壳机械手的连接臂现阶段配备的是传统夹具,在淋砂工序完成后,仍然需要人工的将夹具上夹持的模壳快速拿下,并更换下一个模壳,这种人工手动进行卸料和装料的方式,在一定程度上会影响生产效率,并且模壳的重量较高,工作人员上下料过程中十分费力不便,因此公开一种制壳机械手自动上下料抓手及制壳机械手。
技术实现思路
1、本实用新型的目的是提供一种制壳机械手自动上下料抓手,解决上述背景技术提到的技术问题。
2、为解决上述技术问题,本实用新型采用如下技术方案:
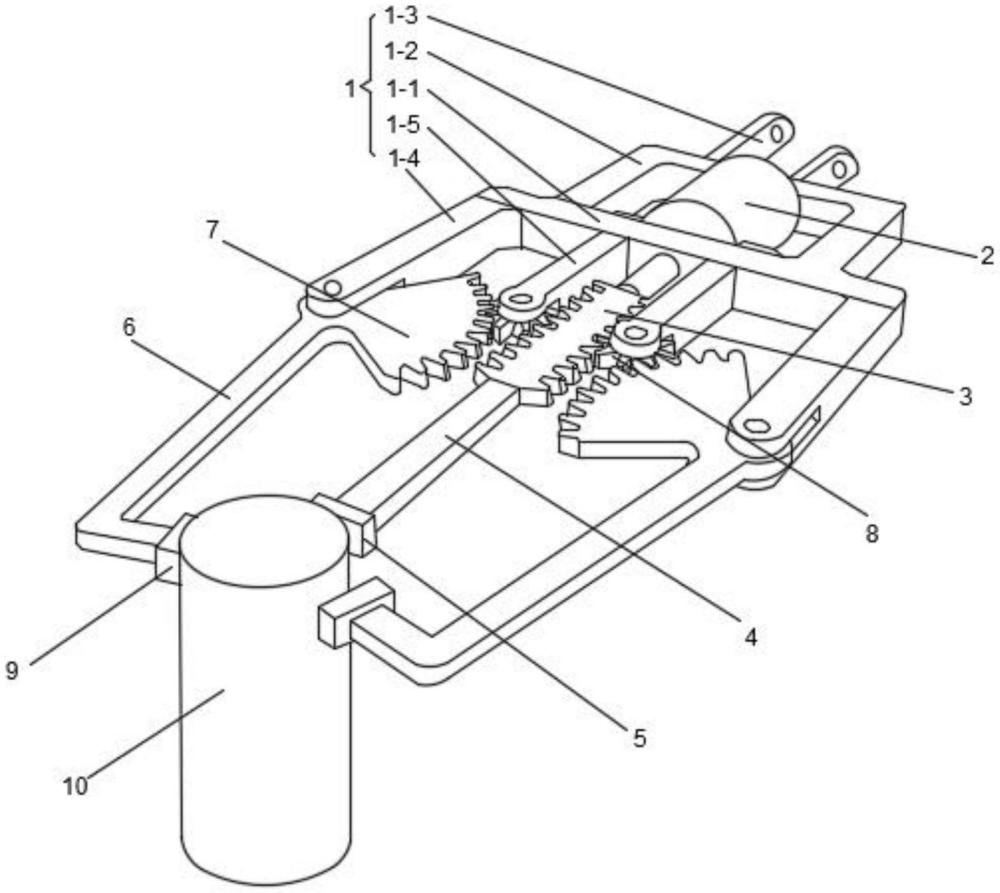
3、本实用新型一种制壳机械手自动上下料抓手,包括主架,所述主架包括基座,所述基座的一侧的中部固定设置有驱动气缸,所述驱动气缸的伸缩端贯穿所述基座并且与双边齿条的一端固定连接,所述双边齿条的另一端与第一连杆的一端固定连接,所述第一连杆的另一端固定设置有第一夹块;所述基座的两端沿所述双边齿条对称的固定设置有两个第一安装座,两个所述第一安装座的自由端分别与两个l形的第二连杆的一端铰接连接,各所述第二连杆与所述第一安装座的铰接端靠近所述双边齿条的一侧分别固定设置有一个扇形齿轮,两个所述扇形齿轮分别与所述双边齿条的两侧传动连接;两个所述第二连杆的另一端分别固定设置有第二夹块。
4、进一步的,所述基座在所述驱动气缸的主体外部固定设置有u形的连接座,所述连接座远离所述基座的一端的外部对称设置有两个用于与制壳机械手的连接臂相连接的连接耳。
5、进一步的,所述基座在所述双边齿条与两个所述第一安装座之间的部位固定的对称设置有两个第二安装座,两个所述第二安装座的自由端分别转动设置有一个传动齿轮,各所述传动齿轮的一侧端与所述双边齿条的对应侧相啮合,各所述传动齿轮的另一侧端与对应的所述扇形齿轮相啮合。
6、进一步的,所述第一夹块以及两个所述第二夹块上分别开设有防滑纹。
7、另外,本实用新型还公开了一种制壳机械手,包括上述的制壳机械手自动上下料抓手。
8、与现有技术相比,本实用新型的有益技术效果:
9、本实用新型配合制壳机械手作业,可完成制壳加工过程中对模壳坯料的自动上下料作业,无需工人手动工手动进行卸料和装料,从而有效提高了熔模的制壳加工效率,降低了工人的劳动强度。
技术特征:
1.一种制壳机械手自动上下料抓手,其特征在于:包括主架,所述主架包括基座,所述基座的一侧的中部固定设置有驱动气缸,所述驱动气缸的伸缩端贯穿所述基座并且与双边齿条的一端固定连接,所述双边齿条的另一端与第一连杆的一端固定连接,所述第一连杆的另一端固定设置有第一夹块;所述基座的两端沿所述双边齿条对称的固定设置有两个第一安装座,两个所述第一安装座的自由端分别与两个l形的第二连杆的一端铰接连接,各所述第二连杆与所述第一安装座的铰接端靠近所述双边齿条的一侧分别固定设置有一个扇形齿轮,两个所述扇形齿轮分别与所述双边齿条的两侧传动连接;两个所述第二连杆的另一端分别固定设置有第二夹块。
2.根据权利要求1所述的制壳机械手自动上下料抓手,其特征在于:所述基座在所述驱动气缸的主体外部固定设置有u形的连接座,所述连接座远离所述基座的一端的外部对称设置有两个用于与制壳机械手的连接臂相连接的连接耳。
3.根据权利要求1所述的制壳机械手自动上下料抓手,其特征在于:所述基座在所述双边齿条与两个所述第一安装座之间的部位固定的对称设置有两个第二安装座,两个所述第二安装座的自由端分别转动设置有一个传动齿轮,各所述传动齿轮的一侧端与所述双边齿条的对应侧相啮合,各所述传动齿轮的另一侧端与对应的所述扇形齿轮相啮合。
4.根据权利要求1所述的制壳机械手自动上下料抓手,其特征在于:所述第一夹块以及两个所述第二夹块上分别开设有防滑纹。
5.一种制壳机械手,其特征在于:包括权利要求1-4任一项所述的制壳机械手自动上下料抓手。
技术总结
本技术公开了一种制壳机械手自动上下料抓手,包括主架,主架包括基座,所述基座的一侧的中部固定设置有驱动气缸,驱动气缸的伸缩端贯穿基座并且与双边齿条的一端固定连接,双边齿条的另一端与第一连杆的一端固定连接,第一连杆的另一端固定设置有第一夹块;基座的两端沿双边齿条对称的固定设置有两个第一安装座,两个第一安装座的自由端分别与两个L形的第二连杆的一端铰接连接,各第二连杆与所述第一安装座的铰接端靠近双边齿条的一侧分别固定设置有一个扇形齿轮,两个扇形齿轮分别与双边齿条的两侧传动连接;两个第二连杆的另一端分别固定设置有第二夹块。本技术有效提高了熔模的制壳加工效率,降低了工人的劳动强度。
技术研发人员:卫志刚
受保护的技术使用者:望都县志钢铸造有限公司
技术研发日:20230706
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!