用于连铸扇形段拉杆螺母与液压拉伸器的装配工装的制作方法
本技术涉及一种用于连铸扇形段拉杆螺母与液压拉伸器的装配工装。
背景技术:
1、在连铸扇形段具有拉杆螺母,通常需要将拉杆螺母中的拉杆与液压拉伸器进行螺纹连接。目前的安装方式是:将液压拉伸器放在铲角铲上,通过铲角铲带动液压拉伸器移动到拉杆下方,通过人工调整位于铲角铲上的液压拉伸器的位置,使液压拉伸器与拉杆对应,然后再通过铲角铲带动液压拉伸器上升,使拉杆进入到液压拉伸器的内螺纹孔中,采用工具旋转拉杆,使拉杆与液压拉伸器螺纹连接。
2、对于上述的安装方式,由于需要通过人工不断调整位于铲角铲上的液压拉伸器的位置,以及液压拉伸器自身重量重,不但费时费力,而且由于拉杆螺母在连铸扇形段机架的下部,该位置空间小,操作人员操作难度大。
技术实现思路
1、本实用新型提供一种连铸扇形段拉杆螺母与液压拉伸器的装配工装,本实用新型使液压拉伸器与拉杆的装配变得简单且省时省力。
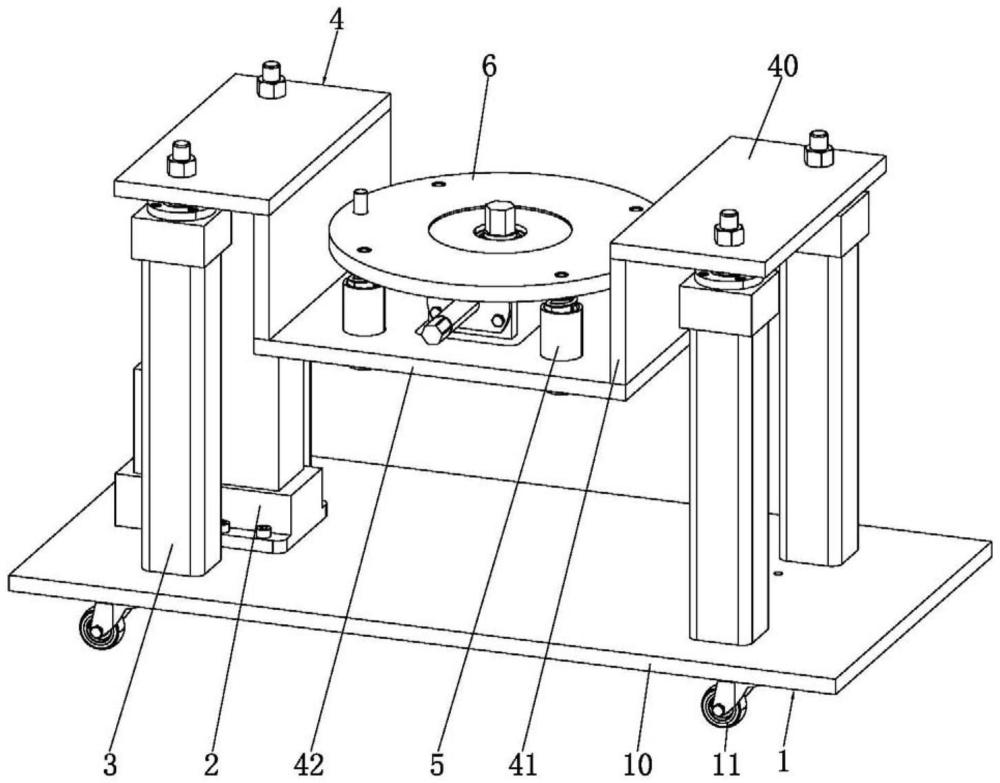
2、用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,包括:
3、底座;
4、直线驱动器,直线驱动器的一端设置在底座上;
5、导向机构,导向机构的一端设置在底座上;
6、托架,托架与导向机构的另一端连接,托架还与直线驱动器的另一端配合;
7、缓冲机构,缓冲机构的一端与托架配合;
8、用于连接液压拉伸器的方向转换机构,方向转换机构与缓冲机构的另一端配合。
9、本实用新型具有以下优点:
10、1、通过万向轮实现工装在各个工位的便捷移动,便于调整液压拉伸器的位置,减轻操作人员的负担。
11、2、通过直线驱动器(电动缸)及其控制系统实现液压拉伸器在任意位置的停止和自锁。
12、3、通过缓冲机构有效的缓解了液压拉伸器在脱离拉杆时的冲击,避免各零件之间硬碰撞产生的危险。
13、4、在有限的空间内布置方向转换机构,将液压螺母的拧紧方向由从底部向上的操作转换为水平方向操作,为使用相应的驱动工具提供可操作的空间。
技术特征:
1.用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,包括:
2.根据权利要求1所述的用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,所述底座(1)包括底座本体(10)、万向轮(11),底座本体(10)与万向轮(11)连接。
3.根据权利要求1所述的用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,直线驱动器(2)为电动缸。
4.根据权利要求1所述的用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,导向机构(3)包括:
5.根据权利要求1所述的用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,托架(4)包括第一连接板(40)、第二连接板(41)、第三连接板(42),第一连接板(40)和第三连接板(42)沿水平方向布置,第二连接板(41)沿纵向布置,第二连接板(41)位于第一连接板(40)和第三连接板(42)之间,第二连接板(41)分别与第一连接板(40)和第三连接板(42)固定,第三连接板(42)上设有用于为方向转换机构(6)让位的让位孔(43)。
6.根据权利要求1所述的用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,缓冲机构(5)包括:
7.根据权利要求6所述的用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,缓冲机构(5)还包括套筒(52),套筒(52)对弹簧(51)的至少一部分形成环绕,套筒(52)的一端与托架(4)固定,套筒(52)的另一端与方向转换机构(6)之间具有间距。
8.根据权利要求6或7所述的用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,所述托架(4)上设有通孔(44),所述在杆状部件(50)穿过通孔(44),杆状部件(50)与通孔(44)间隙配合,杆状部件(50)的一端设有限位凸起(53),杆状部件(50)的另一端与方向转换机构(6)连接。
9.根据权利要求1所述的用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,所述方向转换机构(6)包括:
10.根据权利要求9所述的用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,其特征在于,传动机构包括:
技术总结
本技术公开了一种用于连铸扇形段拉杆螺母与液压拉伸器的装配工装,包括:底座;直线驱动器,直线驱动器的一端设置在底座上;导向机构,导向机构的一端设置在底座上;托架,托架与导向机构的另一端连接,托架还与直线驱动器的另一端配合;缓冲机构,缓冲机构的一端与托架配合;用于连接液压拉伸器的方向转换机构,方向转换机构与缓冲机构的另一端配合。本技术使液压拉伸器与拉杆的装配变得简单且省时省力。
技术研发人员:曹建青,郑志怀,叶进儒
受保护的技术使用者:常州宝菱重工机械有限公司
技术研发日:20230714
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!