一种用于机器人手臂的旋转摆动机构的制作方法
本技术涉及机械手,具体为一种用于机器人手臂的旋转摆动机构。
背景技术:
1、随着科技的进步,机器人的研究应用领域在不断扩展,其中仿人型机器人的研究和应用尤其受到普遍关注,并成为智能机器人领域中最活跃的研究热点之一,仿人型机器人主要是通过机器人手臂完成任务,目前用于机器人手臂的旋转摆动机构存在灵活性较低,摆动方位限制较大等缺点,为此,我们提出一种用于机器人手臂的旋转摆动机构。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种用于机器人手臂的旋转摆动机构,采用旋转机构的顶部可拆卸连接摆动机构,摆动机构的主臂采用电动伸缩杆控制完成二维的摆动,同时采用旋转机构旋转摆动机构协助摆动机构完成三维的摆动,操作灵活,摆动范围较大,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种用于机器人手臂的旋转摆动机构,包括连接板、旋转单元、摆动单元和伸长单元;
3、连接板:设有四个,所述连接板为矩形圆角平板,所述连接板的四角处分别开设螺孔;
4、旋转单元:包含横板、旋转电机、圆柱、轴承连接臂和轴承,最下侧的连接板的上表面中部固定连接横板,所述横板的上表面固定连接旋转电机,所述旋转电机的输出轴固定连接圆柱的底面中部,所述横板的两端分别固定连接轴承连接臂,所述轴承连接臂的顶端可拆卸连接轴承的两端,所述轴承转动连接圆柱,所述圆柱的顶端固定连接连接板,所述旋转电机的输入端通过外部控制开关组与外部电源电连接;
5、摆动单元:安装在旋转单元的上面;
6、伸长单元:安装在摆动单元的上面。
7、横板用于安装旋转电机,旋转电机用于提供旋转动力带动圆柱的旋转,轴承连接臂用于连接横板和轴承,轴承用于转动连接圆柱。
8、进一步的,所述摆动单元包含主臂、活动耳、摆动轴和固定耳、动力组件和铰链组件,所述圆柱顶端的连接板螺栓连接第三个连接板,第三个连接板的上表面中部固定连接固定耳,所述固定耳通过摆动轴活动连接活动耳,所述活动耳的顶端固定连接主臂。
9、主臂用于连接动力组件和铰链组件,活动耳、摆动轴和固定耳用于保持主臂和旋转单元的角度可调,动力组件用于调整角度,铰链组件用于连接动力组件。
10、进一步的,所述动力组件还包含第一连接块、第二连接块和电动伸缩杆,所述主臂的下端两侧分别固定连接第一连接块,所述第三个连接板的两端分别固定连接第二连接块,所述第一连接块的底面分别通过铰链组件连接电动伸缩杆的顶端,所述电动伸缩杆的底端分别通过铰链组件连接第二连接块的顶面,所述电动伸缩杆的输入端通过外部控制开关组与外部电源电连接。
11、第一连接块和第二连接块用于安装铰链组件,电动伸缩杆用于伸缩控制主臂的摆动。
12、进一步的,其特征在于:所述铰链组件还包含铰链一、活动轴和铰链二,所述电动伸缩杆的两端分别固定连接铰链二,所述铰链二分别通过活动轴活动连接铰链一,上侧的铰链二分别固定连接第一连接块,下侧的铰链一分别固定连接第二连接块的上表面。
13、活动轴用于转动连接铰链一和铰链二,保持铰链一和铰链二的角度可调,适用电动伸缩杆的伸缩调整。
14、进一步的,所述伸长单元包含液压缸和滑杆固定耳,所述主臂的顶端固定连接液压缸,顶端液压缸的前后端分别固定连接滑杆固定耳,所述液压缸的输入端通过外部控制开关组与外部电源电连接。
15、液压缸用于伸缩控制机械臂的长度,增加灵活性,滑杆固定耳用于固定滑杆。
16、进一步的,所述伸长单元还包含滑杆和滑套,所述滑杆固定耳的下侧面分别固定连接滑杆的顶端,所述滑杆分别滑动连接滑套,所述滑套分别固定连接主臂的圆周面顶端对应位置。
17、滑杆和滑套用于保持伸缩的稳定。
18、与现有技术相比,本实用新型的有益效果是:本用于机器人手臂的旋转摆动机构,具有以下好处:
19、1、主臂和旋转单元角度可调,采用电动伸缩杆控制主臂的摆动,电动伸缩杆两端采用铰链连接提高了二维摆动的灵活性。
20、2、旋转单元顶部可拆卸连接摆动单元,采用旋转电机旋转动力给圆柱可拆装连接摆动单元,不仅能旋转还可以使二维摆动升级为三维的运动。
21、3、采用液压缸伸缩控制大臂的长度,通过滑杆固定耳固定的滑杆在滑套内滑动,保持伸缩的稳定。
技术特征:
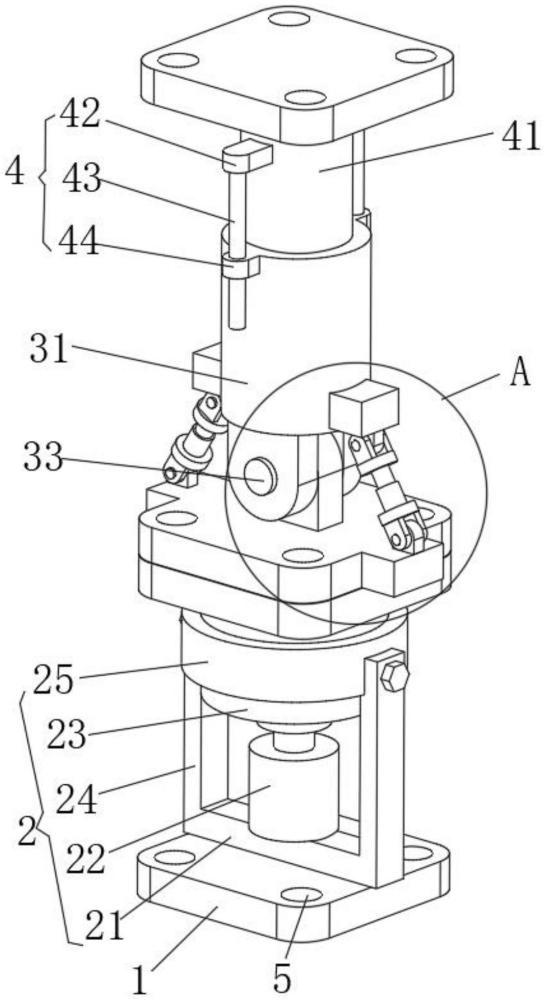
1.一种用于机器人手臂的旋转摆动机构,其特征在于:包括连接板(1)、旋转单元(2)、摆动单元(3)和伸长单元(4);
2.根据权利要求1所述的一种用于机器人手臂的旋转摆动机构,其特征在于:所述摆动单元(3)包含主臂(31)、活动耳(32)、摆动轴(33)和固定耳(34)、动力组件和铰链组件,所述圆柱(23)顶端的连接板(1)螺栓连接第三个连接板(1),第三个连接板(1)的上表面中部固定连接固定耳(34),所述固定耳(34)通过摆动轴(33)活动连接活动耳(32),所述活动耳(32)的顶端固定连接主臂(31)。
3.根据权利要求2所述的一种用于机器人手臂的旋转摆动机构,其特征在于:所述动力组件还包含第一连接块(35)、第二连接块(36)和电动伸缩杆(37),所述主臂(31)的下端两侧分别固定连接第一连接块(35),所述第三个连接板(1)的两端分别固定连接第二连接块(36),所述第一连接块(35)的底面分别通过铰链组件连接电动伸缩杆(37)的顶端,所述电动伸缩杆(37)的底端分别通过铰链组件连接第二连接块(36)的顶面,所述电动伸缩杆(37)的输入端通过外部控制开关组与外部电源电连接。
4.根据权利要求3所述的一种用于机器人手臂的旋转摆动机构,其特征在于:所述铰链组件还包含铰链一(38)、活动轴(39)和铰链二(310),所述电动伸缩杆(37)的两端分别固定连接铰链二(310),所述铰链二(310)分别通过活动轴(39)活动连接铰链一(38),上侧的铰链二(310)分别固定连接第一连接块(35),下侧的铰链一(38)分别固定连接第二连接块(36)的上表面。
5.根据权利要求2所述的一种用于机器人手臂的旋转摆动机构,其特征在于:所述伸长单元(4)包含液压缸(41)和滑杆固定耳(42),所述主臂(31)的顶端固定连接液压缸(41),顶端液压缸(41)的前后端分别固定连接滑杆固定耳(42),所述液压缸(41)的输入端通过外部控制开关组与外部电源电连接。
6.根据权利要求5所述的一种用于机器人手臂的旋转摆动机构,其特征在于:所述伸长单元(4)还包含滑杆(43)和滑套(44),所述滑杆固定耳(42)的下侧面分别固定连接滑杆(43)的顶端,所述滑杆(43)分别滑动连接滑套(44),所述滑套(44)分别固定连接主臂(31)的圆周面顶端对应位置。
技术总结
本技术公开了一种用于机器人手臂的旋转摆动机构,涉及机械手技术领域,包括连接板、旋转单元、摆动单元和伸长单元;连接板:设有四个,所述连接板为矩形圆角平板,所述连接板的四角处分别开设螺孔;旋转单元:包含横板、旋转电机、圆柱、轴承连接臂和轴承,最下侧的连接板的上表面中部固定连接横板,所述横板的上表面固定连接旋转电机,所述旋转电机的输出轴固定连接圆柱的底面中部,所述横板的两端分别固定连接轴承连接臂,采用旋转机构的顶部可拆卸连接摆动机构,摆动机构的主臂采用电动伸缩杆控制完成二维的摆动,同时采用旋转机构旋转摆动机构协助摆动机构完成三维的摆动,操作灵活,摆动范围较大。
技术研发人员:梁午昶,包晓丽
受保护的技术使用者:安翼机器人(江苏)有限公司
技术研发日:20230717
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!