一种用于机器人多轴系统的直线驱动模组的制作方法
本技术涉及机器人移动,具体领域为一种用于机器人多轴系统的直线驱动模组。
背景技术:
1、在机器人多轴系统中具有用于驱动机器人水平移动的直线驱动模组,直线驱动模组采用滑块和导轨的组合,通过滑块在导轨上的滑动来实现直线运动。它可以提供高精度、高刚度和高重复定位精度的直线运动。
2、直线导轨驱动模组通常由导轨、滑块、传动系统和定位系统组成。导轨由高精度的线性导轨轨道和导轨座组成,直线导轨驱动模组的整体构成包括导轨、滑块、传动系统和定位系统。
3、导轨:导轨是一种高精度的线性导向装置,通常由硬质合金或不锈钢制成。导轨上具有滑动表面,能够提供平稳的直线运动。
4、滑块:滑块是直线导轨驱动模组的运动部件,通常由高强度的金属制成,上面有负载平台用于承载工件或设备。滑块通过滚珠或滑动方式固定在导轨上,实现直线运动。
5、传动系统:传动系统用于驱动滑块在导轨上的运动。常见的传动方式有蜗轮蜗杆传动、齿轮传动和直线电机传动等。传动系统能够将电动机的动力传递给滑块,实现直线驱动。
6、定位系统:定位系统用于测量和控制滑块的位置,保证其精确的定位。常见的定位系统包括编码器、线性位移传感器和光栅尺等。定位系统能够提供高精度的位置反馈,以便实现精确的定位控制。
7、但是目前对于高端机器人移动机构多采用全包裹式来预防外部粉尘对导轨模组的污染和影响,但是对于模组出现故障后不便于维修和故障检测;同时对于低端简易化的机器人结构,其主要是在能实现基本功能的情况下尽可能的降低结构成本,目前导轨与滑块多采用滑动移动,因此粉尘落在导轨表面时,滑块在导轨上移动,会对导轨造成磨损,同时导轨磨损后滑块与导轨之间的摩擦力会变大,导致平台移动不顺畅,因此解决简易结构下的功能完善问题尤为重要,以确保其正常运行和长期使用。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的在于提供一种用于机器人多轴系统的直线驱动模组。
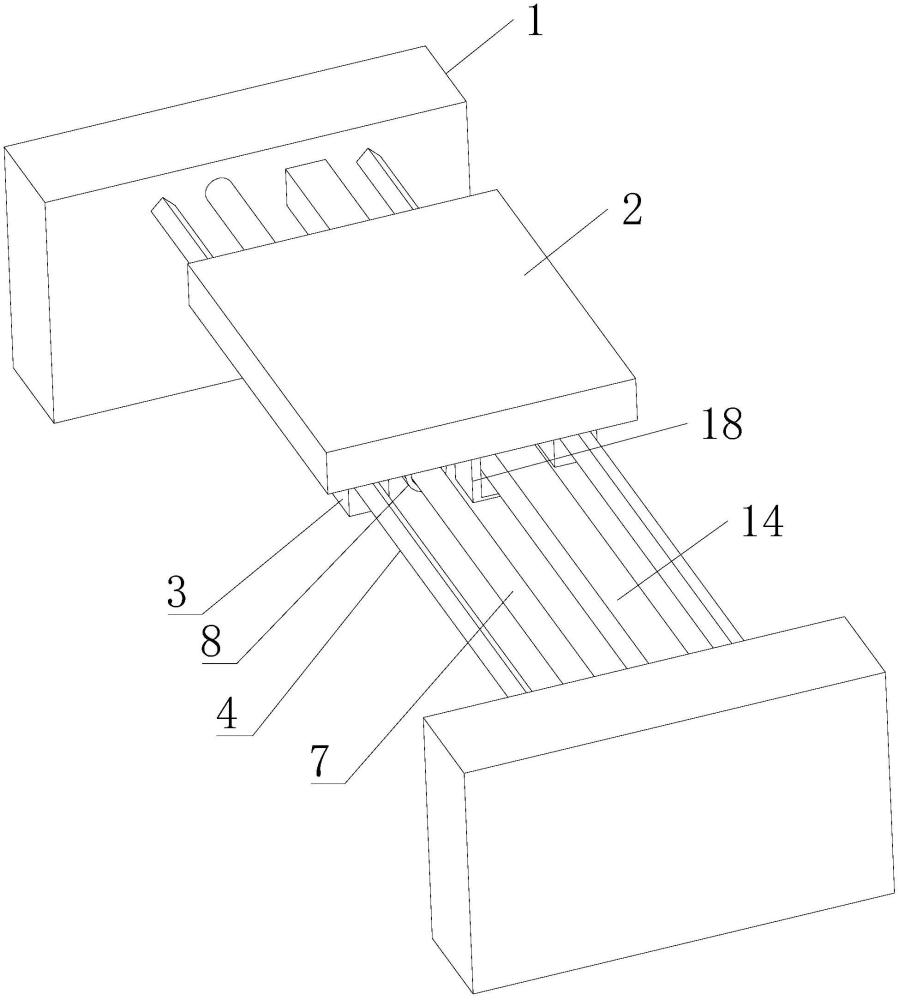
2、为实现上述目的,本实用新型提供如下技术方案:一种用于机器人多轴系统的直线驱动模组,包括安装座、移动平台、滑块、导轨、驱动电机、减速机、丝杆、丝杆螺母和测距模组,所述导轨为截面是正方形的长导轨,导轨设置有两根,且两根导轨水平平行设置在安装座上,所述滑块设置有多个,且每根导轨上均设置有相同数量的滑块,所有的滑块与移动平台的底部固定连接,所述滑块上设置有与导轨配合的方形通孔,方形通孔的大小大于导轨的正方形截面,所述方形通孔的4个内壁上均设置有一个安装槽,所述滑块的外表面上针对每个安装槽处均设置有一个安装孔,每个所述安装槽内均设置有一个轴承,所述安装孔内固定设置有与轴承转动连接的轴杆,每个滑块内的4个轴承外圈均抵触于导轨的对应表面,所述安装座设置有两个,两个安装座呈对称设置在导轨的两端,
3、所述驱动电机和减速机安装在其中一安装座上,且驱动电机的转动轴与减速机的输入轴连接,所述丝杆转动设置在两个安装座之间,所述丝杆螺母配合设置在丝杠上,且丝杠螺母与移动平台固定连接,所述减速机的输出轴与丝杆的一端连接,
4、所述测距模组安装在其中一安装座上,且测距模组的测距端朝向移动平台设置。
5、在其中一些实施例中,所述导轨的端面呈菱形状固定安装,所述滑块上的方形通孔为呈菱形状与导轨配合设置。
6、在其中一些实施例中,所述测距模组包括方管、激光测距仪和标靶,所述方管的两端分别与其中一安装座固定,方管的表面设置有与方管长度方向一致的通槽,所述标靶呈凸字形设计,标靶的大端位于方管内,标靶的小端通过通槽与移动平台固定连接,所述激光测距仪安装在其中一安装座上,且激光测距仪的测距端置于方管内朝向标靶的表面设置。
7、在其中一些实施例中,所述通槽位于方管的下侧表面,所述移动平台与标靶之间设置有l形连杆,l形连杆的一端与移动平台固定连接,l形连杆的另一端与标靶的小端固定连接。
8、在其中一些实施例中,所述驱动电机为普通电机、步进电机或伺服电机中的一种。
9、与现有技术相比,本实用新型的有益效果是:通过滑动配合改进为滚动配合,进一步降低了平台滑移的摩擦力,同时降低滑动摩擦出现的磨损情况提高导轨的使用寿命;
10、通过测距模组结构的设置,能够提高移动平台的移动精度,同时不易被外界粉尘影响。
11、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂,通过本申请的实施例对本申请进行详尽说明和了解。
技术特征:
1.一种用于机器人多轴系统的直线驱动模组,其特征在于:包括安装座、移动平台、滑块、导轨、驱动电机、减速机、丝杆、丝杆螺母和测距模组,所述导轨为截面是正方形的长导轨,导轨设置有两根,且两根导轨水平平行设置在安装座上,所述滑块设置有多个,且每根导轨上均设置有相同数量的滑块,所有的滑块与移动平台的底部固定连接,所述滑块上设置有与导轨配合的方形通孔,方形通孔的大小大于导轨的正方形截面,所述方形通孔的4个内壁上均设置有一个安装槽,所述滑块的外表面上针对每个安装槽处均设置有一个安装孔,每个所述安装槽内均设置有一个轴承,所述安装孔内固定设置有与轴承转动连接的轴杆,每个滑块内的4个轴承外圈均抵触于导轨的对应表面,所述安装座设置有两个,两个安装座呈对称设置在导轨的两端,
2.根据权利要求1所述的一种用于机器人多轴系统的直线驱动模组,其特征在于:所述导轨的端面呈菱形状固定安装,所述滑块上的方形通孔为呈菱形状与导轨配合设置。
3.根据权利要求1所述的一种用于机器人多轴系统的直线驱动模组,其特征在于:所述测距模组包括方管、激光测距仪和标靶,所述方管的两端分别与其中一安装座固定,方管的表面设置有与方管长度方向一致的通槽,所述标靶呈凸字形设计,标靶的大端位于方管内,标靶的小端通过通槽与移动平台固定连接,所述激光测距仪安装在其中一安装座上,且激光测距仪的测距端置于方管内朝向标靶的表面设置。
4.根据权利要求3所述的一种用于机器人多轴系统的直线驱动模组,其特征在于:所述通槽位于方管的下侧表面,所述移动平台与标靶之间设置有l形连杆,l形连杆的一端与移动平台固定连接,l形连杆的另一端与标靶的小端固定连接。
5.根据权利要求1所述的一种用于机器人多轴系统的直线驱动模组,其特征在于:所述驱动电机为普通电机、步进电机或伺服电机中的一种。
技术总结
本技术涉及机器人移动技术领域,尤其是一种用于机器人多轴系统的直线驱动模组,包括安装座、移动平台、滑块、导轨、驱动电机、减速机、丝杆、丝杆螺母和测距模组,所述导轨为截面是正方形的长导轨,所述滑块上设置有与导轨配合的方形通孔,通孔内设置有4个与导轨抵触的轴承,所述驱动电机和减速机安装在其中一安装座上,所述测距模组安装在其中一安装座上,且测距模组的测距端朝向移动平台设置,本技术结构简单,通过滑动配合改进为滚动配合,进一步降低了平台滑移的摩擦力,同时降低滑动摩擦出现的磨损情况提高导轨的使用寿命。
技术研发人员:周炜
受保护的技术使用者:上海灵铭机器人科技有限公司
技术研发日:20230718
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!