机器人关节结构及机器人的制作方法
本技术涉及机器人关节,尤其涉及一种机器人关节结构及机器人。
背景技术:
1、工业机器人是现代制造业中的一种重要的自动化装备,已经被广泛应用在cnc(computerized numerical control,计算机数控技术)上下料、手机壳打磨、金属打磨等应用领域,以工业机器人为核心的制造装备的需求日益加大。在多关节机器人本体研发过程中,机器人关节装置方案的设计是一个至关重要的环节,是整个机器人机械部分研发的技术核心之一。现有的机器人关节装置一般都会包括驱动电机、减速机以及摇臂,减速机对驱动电机的转动进行减速后驱使摇臂动作。但是,现有的机器人关节装置拆装不方便,降低了装配效率。
技术实现思路
1、本实用新型的主要目的是提供一种机器人关节结构及机器人,旨在解决目前机器人关节装置不方便拆装的技术问题。
2、为实现上述目的,本实用新型实施例提出一种机器人关节结构,应用于多关节机器人,所述多关节机器人至少包括第一机械臂和第二机械臂,所述机器人关节结构包括:
3、驱动电机,设于所述第二机械臂的内壁;
4、谐波减速机,所述谐波减速机包括刚柔轮及设置在刚柔轮内部的波发生器,所述驱动电机与所述波发生器驱动连接,所述刚柔轮包括转动连接的刚轮及柔轮,所述波发生器设置在所述刚轮的内部,所述柔轮设置在所述刚轮的外侧且沿所述驱动电机的轴向延伸以形成具有开口的腔体,所述腔体的开口朝向或背向所述驱动电机,所述刚轮和所述柔轮中背向所述驱动电机的一个与所述第一机械臂连接;以及
5、法兰盘,设于所述驱动电机的外周面,所述第二机械臂与所述法兰盘连接。
6、可选地,在本实用新型一实施例中,所述腔体的开口朝向所述驱动电机,所述刚轮与所述第一机械臂连接,所述柔轮和所述第二机械臂均连接于所述法兰盘。
7、可选地,在本实用新型一实施例中,所述第一机械臂设有用于显露所述波发生器的安装口,所述安装口的开口面积大于波发生器的截面面积。
8、可选地,在本实用新型一实施例中,所述机器人关节结构还包括安装盖板,所述安装盖板可拆卸的设于所述安装口。
9、可选地,在本实用新型一实施例中,所述安装盖板设有注油孔,所述注油孔贯穿所述安装盖板。
10、可选地,在本实用新型一实施例中,所述机器人关节结构还包括油塞,所述油塞可拆卸的设于所述注油孔。
11、可选地,在本实用新型一实施例中,所述第二机械臂的内部设有限位部,所述限位部与所述法兰盘干涉配合以限定所述法兰盘的位置,所述限位部上设有避让缺口。
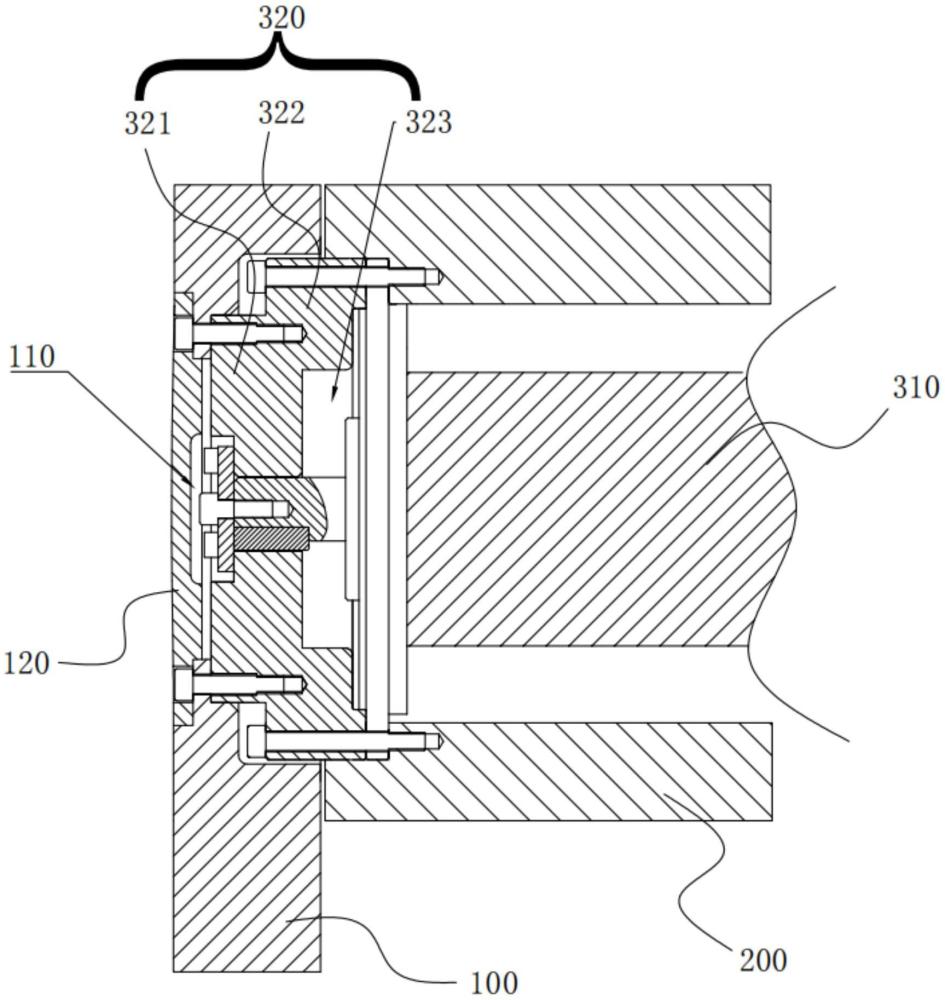
12、可选地,在本实用新型一实施例中,所述腔体的开口背向所述驱动电机,所述柔轮与所述第一机械臂连接,所述法兰盘朝向所述刚轮的一侧设有安装槽,所述刚轮背离所述柔轮的一端设于所述安装槽内。
13、可选地,在本实用新型一实施例中,所述机器人关节结构还包括安装环板,所述安装环板套设于所述柔轮的外周面且与所述刚轮朝向所述驱动电机的侧面相贴,所述第一机械臂、所述刚轮以及所述安装环板通过螺栓连接。
14、为实现上述目的,本实用新型实施例提出一种机器人,所述机器人包括第一机械臂、第二机械臂以及机器人关节结构,所述第一机械臂和所述第二机械臂通过所述机器人关节结构相对转动,所述机器人关节结构为以上描述的机器人关节结构。
15、相对于现有技术,本实用新型提出的一个技术方案中,在装配关节结构的时候,驱动电机的驱动轴可以伸入腔体中与波发生器连接,如此可以将驱动电机与谐波减速机装配为一个整体,然后将装配后的驱动电机与谐波减速机作为一个整体组件一同进行装配,使得刚轮和柔轮中背向驱动电机的一个与第一机械臂固定连接,而法兰盘与第二机械臂固定连接,从而完成机器人关节结构的装配,实现第一机械臂和第二机械臂的相对转动。整个装配过程的装配要求不高,降低了装配复杂性,有效提高装配效率。而且,相较于在谐波减速机之后安装驱动电机,还可以防止机器人关节出现振动、噪音,进而提升机器人关节的性能及寿命。
技术特征:
1.一种机器人关节结构,其特征在于,应用于多关节机器人,所述多关节机器人至少包括第一机械臂和第二机械臂,所述机器人关节结构包括:
2.如权利要求1所述的机器人关节结构,其特征在于,所述腔体的开口朝向所述驱动电机,所述刚轮与所述第一机械臂连接,所述柔轮和所述第二机械臂均连接于所述法兰盘。
3.如权利要求2所述的机器人关节结构,其特征在于,所述第一机械臂设有用于显露所述波发生器的安装口,所述安装口的开口面积大于波发生器的截面面积。
4.如权利要求3所述的机器人关节结构,其特征在于,所述机器人关节结构还包括安装盖板,所述安装盖板可拆卸的设于所述安装口。
5.如权利要求4所述的机器人关节结构,其特征在于,所述安装盖板设有注油孔,所述注油孔贯穿所述安装盖板。
6.如权利要求5所述的机器人关节结构,其特征在于,所述机器人关节结构还包括油塞,所述油塞可拆卸的设于所述注油孔。
7.如权利要求2所述的机器人关节结构,其特征在于,所述第二机械臂的内部设有限位部,所述限位部与所述法兰盘干涉配合以限定所述法兰盘的位置,所述限位部上设有避让缺口。
8.如权利要求1所述的机器人关节结构,其特征在于,所述腔体的开口背向所述驱动电机,所述柔轮与所述第一机械臂连接,所述法兰盘朝向所述刚轮的一侧设有安装槽,所述刚轮背离所述柔轮的一端设于所述安装槽内。
9.如权利要求8所述的机器人关节结构,其特征在于,所述机器人关节结构还包括安装环板,所述安装环板套设于所述柔轮的外周面且与所述刚轮朝向所述驱动电机的侧面相贴,所述第一机械臂、所述刚轮以及所述安装环板通过螺栓连接。
10.一种机器人,其特征在于,所述机器人包括第一机械臂、第二机械臂以及机器人关节结构,所述第一机械臂和所述第二机械臂通过所述机器人关节结构相对转动,所述机器人关节结构为如权利要求1-9任一项所述的机器人关节结构。
技术总结
本技术公开一种机器人关节结构及机器人,应用于多关节机器人,多关节机器人至少包括第一机械臂和第二机械臂,机器人关节结构包括:驱动电机,设于第二机械臂的内壁;谐波减速机,谐波减速机包括刚柔轮及设置在刚柔轮内部的波发生器,驱动电机与波发生器驱动连接,刚柔轮包括转动连接的刚轮及柔轮,波发生器设置在刚轮的内部,柔轮设置在刚轮的外侧且沿驱动电机的轴向延伸以形成具有开口的腔体,腔体的开口朝向或背向驱动电机,刚轮和柔轮中背向驱动电机的一个与第一机械臂连接;以及法兰盘,设于驱动电机的外周面,第二机械臂与法兰盘连接。本技术提出的技术方案,解决了目前机器人关节装置不方便拆装的技术问题。
技术研发人员:屈云飞,朱家增,孙佳星,郭长建,陈刚
受保护的技术使用者:深圳市汇川技术股份有限公司
技术研发日:20230719
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!